|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Проектирование и анализ систем управленияСтр 1 из 2Следующая ⇒
Simulink Simulink – это интерактивная система для анализа линейных и нелинейных динамических систем. Это графическая система настроенная на использование “мыши”. Она позволяет вам моделировать систему простым перетаскиванием блоков в рабочую область и последующей установкой их параметров. Simulink может работать с линейными, нелинейными, непрерывными, дискретными, многомерными системами. Описание библиотек
В данной библиотеке содержатся блоки, способные генерировать следующие сигналы:
В этой библиотеке содержатся следующие блоки:
При описании дискретных моделей используются узлы и блоки, которые соответствуют блокам для описания непрерывных систем.
При описании линейных моделей систем вы можете использовать следующие блоки:
Звенья могут задаваться как нулями и полюсами, так и коэффициентами при соответствующих степенях дробно-рационального выражения.
Здесь содержатся такие узлы:
Дополнительные блоки При двойном нажатии левой клавиши “мыши” на данном элементе вы получаете доступ к дополнительным блокам если они установлены. В стандартную установку входит блок:
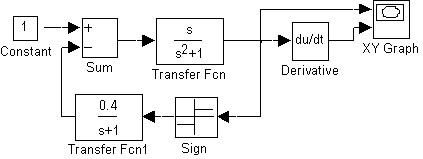
Этот блок включает в себя еще шесть блоков. Additional Sinks – дополнительные средства визуализации сигналов при помощи которых можно исследовать спектральный состав сигнала или построить график функции корреляции двух сигналов. Additional Discrete – здесь содержатся допонительные блоки для исследования дискретных систем. Эти блоки являются аналогами стандартных блоков с тем исключением, что для каждого из этих блоков можно задать начальные условия. Additional Linear – содержащиеся здесь блоки являются аналогами стандартных блоков с тем исключением, что для каждого из этих блоков можно задать начальные условия, также здесь имеется ПИД - регулятор. Transformations – в эту группу входят блоки, производящие перевод из одной системы координат в другую, а также блоки преобразований температур в различных исчислениях. Flip Flops – содержащиеся здесь блоки имитируют работу различных триггеров (RS, D, JK). Также здесь имеется блок подачи тактовых импульсов. Linearization – содержащийся здесь один блок выполняет либо взятие производной входного сигнала либо его линеаризацию. Пример Пример построения модели с нелинейным элементом в цепи обратной связи и исследование устойчивости ситемы.
Для построения фазового портрета для данной модели используются узел дифференцирования (du/dt) и узел отображения информации по двум координатам (XY Graph). При этом получаем следующий фазовый портрет:
Таким образом, из анализа графика можно сделать вывод, что эта система является устойчивой.
Simulink Control Design ™ позволяет проектировать и анализировать системы управления моделируется в Simulink ®. Вы можете автоматически настроить завоевания ПИД-регуляторы для удовлетворения требований к производительности. С помощью этого продукта вы также можете найти nonintrusively рабочие точки и вычислить точноелинеаризации моделей Simulink в различных условиях эксплуатации. Simulink Control Design предоставляет инструменты для вычислений на основе моделирования частотных без изменения модели. Графический интерфейс пользователя (GUI) позволяет проектировать и анализировать произвольные структуры управления моделируется в Simulink, такие как каскадные, фильтр предварительной очистки, регулирования и многопетлевых архитектуры.
Simscape
Описание
Simscape – расширяющий возможности Simulink продукт для моделирования физических объектов с использованием различных технологий: электронной, механической, гидравлической и других. Simscape содержит библиотеку основных блоков для моделирования компонентов в каждой из этих технологий, служит основой дляSimMechanics, SimDriveline, SimHydraulics, SimElectronics и SimPowerSystems, а также предоставляет возможность текстового моделирования компонентов используя язык программирования Simscape, основанный на языке MATLAB.
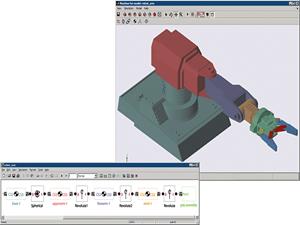
SimMechanics
Описание
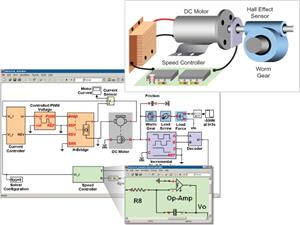
SimElectronics
Описание
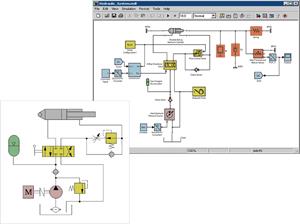
SimHydraulics
Описание
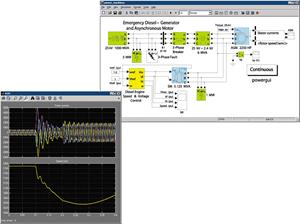
SimPowerSystems
Описание
MATLAB · MATLAB · Parallel Computing Toolbox · MATLAB Distributed Computing Server Математика и оптимизация · Optimization Toolbox · Symbolic Math Toolbox · Partial Differential Equation Toolbox · Global Optimization Toolbox Статистика и анализ данных · Statistics Toolbox · Neural Network Toolbox · Curve Fitting Toolbox · Model-Based Calibration Toolbox Обработка сигналов и связь · Signal Processing Toolbox · Communications System Toolbox · DSP System Toolbox · Wavelet Toolbox · Fixed-Point Toolbox · RF Toolbox · Phased Array System Toolbox Тесты и измерения · Data Acquisition Toolbox · Instrument Control Toolbox · Image Acquisition Toolbox · SystemTest · OPC Toolbox · Vehicle Network Toolbox Вычислительная биология · Bioinformatics Toolbox · SimBiology Финансовые вычисления · Financial Toolbox · Datafeed Toolbox · Financial Instruments Toolbox · Econometrics Toolbox Разработка приложений · MATLAB Compiler · Spreadsheet Link EX · MATLAB Builder EX (for Microsoft Excel) · MATLAB Builder JA (for Java language) · MATLAB Builder NE · MATLAB Production Server SIMULINK · Simulink · Simulink Report Generator Событийное моделирование · Stateflow · SimEvents Физическое моделирование · Simscape · SimMechanics · SimPowerSystems · SimDriveline · SimHydraulics · SimElectronics · Thermolib Графическое моделирование · Simulink 3D Animation · Gauges Blockset Обработка сигналов и связь · Communications System Toolbox · DSP System Toolbox · SimRF · Computer Vision System Toolbox О FlightGear интерфейс FlightGear интерфейс симулятор полета вместе с продуктом Toolbox аэрокосмической представляет собой однонаправленный канал передачи с помощью программного обеспечения MATLAB для FlightGear. Он использует опубликованные FlightGear в net_fdm двоичный протокол обмена данными. Данные передаются с помощью UDP пакетов в сети работающий экземпляр FlightGear. Инструментарий поддерживает несколько стандартных дистрибутивов двоичный FlightGear. Для интерфейса подробно см. Flight Simulator интерфейса Пример следующем. FlightGear является отдельным юридическим лицом программное обеспечение, которое не создано, принадлежащих, или поддерживается MathWorks. · Чтобы сообщить ошибки в запросе или улучшения в интерфейсе аэрокосмического Toolbox FlightGear, свяжитесь MathWorks технической поддержки на http: //www.mathworks.com/support/. · Чтобы сообщить ошибки или запрос усовершенствования FlightGear себя, пойти вwww.flightgear.org и использовать контактную страницу. Графика Рекомендации для Microsoft Windows Для Windows ® пользователей, это изделие рекомендуется использовать следующие рекомендации графику: · Видеокарта с хорошей производительностью OpenGL. · Последний проверенный и стабильный релиз драйвера для вашей видеокарты. Проверьте водитель тщательно на нескольких компьютерах перед развертыванием в другие. Для Microsoft ® Windows-систем, работающих на XP x86 (32-разрядная) или AMD-64/EM64T архитектуры чипа, графическая карта работает в незащищенном пространстве ядра, известного как Ring Zero. Проблемы в драйвере может вызвать операционная система, чтобы заблокировать или аварии. Перед покупкой большого количества компьютеров для 3-D приложений, с поставщиком, тестирование одного или двух компьютеров, чтобы найти комбинацию аппаратных средств, операционной системы, драйверов и настройки, которые являются стабильными для ваших приложений. Данные траектории полета Создание Run Script Для начала FlightGear с начальными условиями (место, дата, время, погода, режимы работы), что вы хотите, то лучше создайте выполнения сценария с помощью GenerateRunScript команду: GenerateRunScript (ч) По умолчанию, GenerateRunScript сохраняет выполнения сценария в виде текстового файла с именем runfg.bat. Вы можете указать другое имя, изменив OutputFileName свойство объекта FlightGearAnimation, как описано в предыдущем шаге. Этот файл не должен быть сгенерирован каждый раз, когда данные рассматриваются только тогда, когда начальные условия или FlightGear изменения информации. Теперь вы готовы, чтобы начать FlightGear (см. Запуск FlightGear тренажер ). Запуск FlightGear тренажер Для начала FlightGear из командной строки MATLAB используется система команд для выполнения выполнения скрипта. Укажите имя выходного файла, созданного GenerateRunScript в качестве аргумента: Система (" runfg.bat & '); FlightGear начинается в отдельном окне.
Теперь вы готовы для воспроизведения данных (см. Воспроизведение траектории полета ). Simulink Simulink – это интерактивная система для анализа линейных и нелинейных динамических систем. Это графическая система настроенная на использование “мыши”. Она позволяет вам моделировать систему простым перетаскиванием блоков в рабочую область и последующей установкой их параметров. Simulink может работать с линейными, нелинейными, непрерывными, дискретными, многомерными системами. Описание библиотек
В данной библиотеке содержатся блоки, способные генерировать следующие сигналы:
В этой библиотеке содержатся следующие блоки:
При описании дискретных моделей используются узлы и блоки, которые соответствуют блокам для описания непрерывных систем.
При описании линейных моделей систем вы можете использовать следующие блоки:
Звенья могут задаваться как нулями и полюсами, так и коэффициентами при соответствующих степенях дробно-рационального выражения.
Здесь содержатся такие узлы:
Дополнительные блоки При двойном нажатии левой клавиши “мыши” на данном элементе вы получаете доступ к дополнительным блокам если они установлены. В стандартную установку входит блок:
Этот блок включает в себя еще шесть блоков. Additional Sinks – дополнительные средства визуализации сигналов при помощи которых можно исследовать спектральный состав сигнала или построить график функции корреляции двух сигналов. Additional Discrete – здесь содержатся допонительные блоки для исследования дискретных систем. Эти блоки являются аналогами стандартных блоков с тем исключением, что для каждого из этих блоков можно задать начальные условия. Additional Linear – содержащиеся здесь блоки являются аналогами стандартных блоков с тем исключением, что для каждого из этих блоков можно задать начальные условия, также здесь имеется ПИД - регулятор. Transformations – в эту группу входят блоки, производящие перевод из одной системы координат в другую, а также блоки преобразований температур в различных исчислениях. Flip Flops – содержащиеся здесь блоки имитируют работу различных триггеров (RS, D, JK). Также здесь имеется блок подачи тактовых импульсов. Linearization – содержащийся здесь один блок выполняет либо взятие производной входного сигнала либо его линеаризацию. Пример Пример построения модели с нелинейным элементом в цепи обратной связи и исследование устойчивости ситемы.
Для построения фазового портрета для данной модели используются узел дифференцирования (du/dt) и узел отображения информации по двум координатам (XY Graph). При этом получаем следующий фазовый портрет:
Таким образом, из анализа графика можно сделать вывод, что эта система является устойчивой.
Simulink Control Design ™ позволяет проектировать и анализировать системы управления моделируется в Simulink ®. Вы можете автоматически настроить завоевания ПИД-регуляторы для удовлетворения требований к производительности. С помощью этого продукта вы также можете найти nonintrusively рабочие точки и вычислить точноелинеаризации моделей Simulink в различных условиях эксплуатации. Simulink Control Design предоставляет инструменты для вычислений на основе моделирования частотных без изменения модели. Графический интерфейс пользователя (GUI) позволяет проектировать и анализировать произвольные структуры управления моделируется в Simulink, такие как каскадные, фильтр предварительной очистки, регулирования и многопетлевых архитектуры.
Simscape
Описание
Simscape – расширяющий возможности Simulink продукт для моделирования физических объектов с использованием различных технологий: электронной, механической, гидравлической и других. Simscape содержит библиотеку основных блоков для моделирования компонентов в каждой из этих технологий, служит основой дляSimMechanics, SimDriveline, SimHydraulics, SimElectronics и SimPowerSystems, а также предоставляет возможность текстового моделирования компонентов используя язык программирования Simscape, основанный на языке MATLAB.
SimMechanics
Описание
SimElectronics
Описание
SimHydraulics
Описание
SimPowerSystems
Описание
MATLAB · MATLAB · Parallel Computing Toolbox · MATLAB Distributed Computing Server Математика и оптимизация · Optimization Toolbox · Symbolic Math Toolbox · Partial Differential Equation Toolbox · Global Optimization Toolbox Статистика и анализ данных · Statistics Toolbox · Neural Network Toolbox · Curve Fitting Toolbox · Model-Based Calibration Toolbox Проектирование и анализ систем управления · Control System Toolbox · System Identification Toolbox · Fuzzy Logic Toolbox · Robust Control Toolbox · Model Predictive Control Toolbox · Aerospace Toolbox Обработка сигналов и связь · Signal Processing Toolbox · Communications System Toolbox · DSP System Toolbox · Wavelet Toolbox · Fixed-Point Toolbox · RF Toolbox · Phased Array System Toolbox |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 565; Нарушение авторского права страницы

 Источники сигналов
Источники сигналов  Средства отображения
Средства отображения  Дискретные модели
Дискретные модели  Линейные модели
Линейные модели  Нелинейные элементы
Нелинейные элементы 
 Соединители
Соединители