|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Работа трехфазных асинхронных двигателей при неноминальных условиях
Изменение частоты. Частота сети ft может отличаться от номинальной fH, в особенности, в маломощных автономных энергетических установках (транспорт, лесоразработки, изолированные строительные объекты и пр.). Рассмотрим влияние изменения частоты на работу двигателя, когда иг = £ /1н = const и момент нагрузки на валу Мст равен или близок номинальному. Если пренебречь падениями напряжения, то откуда следует, что при иг — const изменение fx приводит к изменению потока двигателя Ф. С другой стороны, М = & Ф/2 cos t|j2, откуда следует, что при Мст = const изменение Ф приводит к изменению вторичного тока /2 и нагрузочной составляющей первичного тока. Ввиду заметного насыщения магнитной цепи асинхронных двигателей уменьшение /х и соответствующее ему увеличение Ф приводят к значительному увеличению намагничивающего тока /м. Например, уменьшение d на 10% обычно вызывает увеличение /„ на 20—30%. Хотя при увеличении Ф и МС1 — const ток /2 соответственно уменьшается, более значительное увеличение намагничивающего тока может вызвать общее увеличение первичного тока и перегрев первичной обмотки. Увеличение fx и соответствующее ему уменьшение Ф приводят к заметному уменьшению намагничивающего тока. При этом, однако, при М„ = const растет ток /2, что приводит к перегрузке током обмотки ротора, а при определенных условиях также и к перегрузке обмотки статора. Таким образом, как уменьшение, так и увеличение частоты вызывают ухудшение условий работы асинхронных двигателей, работающих при нагрузках, близких к номинальным. Поэтому колебания частоты сети должны быть ограничены. По ГОСТ 183—66 двигатели должны отдавать номинальную мощность при отклонениях частоты от номинального значения до ±5%. Изменение напряжения при fx = /lH приводит, согласно равенству (29-2), к тем же последствиям, как и изменение частоты, с той лишь разницей, что уменьшение Ux вызывает также уменьшение Ф и наоборот. Поэтому изменение иг при /х = const и при нагрузках, близких к номинальным, тоже приводит к ухудшению условий работы асинхронных двигателей. В связи с этим колебания Ux также должны быть ограничены. На основании ГОСТ 183—66 двигатели должны отдавать номинальную мощность при отклонениях напряжения сети от номинального в пределах от —5 до +10%. При одновременном отклонении напряжения и частоты двигатели переменного тока, согласно ГОСТ 183—66, должны отдавать номинальную мощность, если сумма процентных значений этих отклонений без учета знаков не превосходит 10%. Переключение обмоток слабо загруженных асинхронных двигателей с треугольника на звезду. Как было установлено, при боль- Рис. 29-13. " Рабочие характеристики асинхронного двигателя 28 mm, 975 об/мин при соединениях обмотки статора в трегулышк" и звезду и при напряжении сети, равном номинальному фазному напряжению двигателя шой нагрузке асинхронного двигателя уменьшение напряжения не его зажимах приводит к перегрузке обмоток двигателя токами < я всеми вытекающими отсюда ^Последствиями (увеличение потери! уменьшение к. п. д., перегрев обмоток). Однако если двигателЩ нагружен слабо, например до 35—40% от номинальной мощности! то уменьшение иг может привести к улучшению энергетическиэ| показателей двигателя. Действительно, намагничивающий ток /^ в результате уменьшения потока при этом весьма значительна уменьшается и, следовательно, коэффициент мощности заметно уве* личивается. Уменьшаются пропорционально U\ также магнитные потери. Хотя при Мст = const уменьшение £ /а будет вызывать соответствующее увеличение /£, вследствие недогрузки двигателя величина /а может не превышать номинального значения. Нагрузоч* ная составляющая 1г увеличивается тай, же, как /£, но ввиду умени шения /„ результирующая величина 1г может даже уменьшиться?
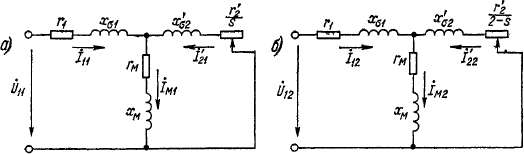
В результате указанных причин величина к. п. д. ц может увеличиться. По ряду причин некоторые асинхронные двигатели в условиях эксплуатации могут быть сильно недогруженными. Если обмотки статора таких двигателей нормально соединены в треугольник, то для улучшения c6s ф и к. п. д. двигателей может оказаться целесообразным переключение их в звезду. Напряжения фаз при этом уменьшатся в |/" 3 раза, что вызовет также уменьшение Ф в У" 3 раза, уменьшение /м в 2—2, 5 раза и при условий Mcr = const = увеличение /а в V" 3 раза. Если при этом к. п. д. улучшится или даже останется неизменным, то для улучшения cos ф сети целесообразно переключить обмотки статора в звезду. Величина нагрузки, ниже которой такое переключение дли данного двигателя целесообразно, должна быть установлена путем расчета или экспериментально. На рйс. 29-13 в качестве иллюстрации к сказанному приведены характеристики двигателя на 28 кет, 975 обТмин. Из этих характеристик видное что для улучшения cos ф переключение обмоток этого двигателя в звезду целесообразно при нагрузках ниже 40% от номинального значения, когда cos ф и г) будут выше, чем при соединении в треугольник. § 29-8. Несимметричные режимы работы асинхронных двигателей Предварительные замечания. Несимметричные режимы работы асинхронных Двигателей возникают в следующих случаях: 1) при искажении симметрии напряжений сети, 2) при несимметрии сопротивлений в цепях статора и ротора, 3) при несимметричной схеме соединений обмоток двигателя. Такие режимы могут возникнуть как результат отклонения условий работы двигателя от нормальных, в частности, вследствие неисправностей и аварий. В ряде случаев несимметричные режимы используются для получения характеристик с особыми свойствами. Рассмотрим некоторые несимметричные режимы и будем полагать, что устройство асинхронной машины в целом и фаз ее обмоток является симметричным. Несимметричные режимы работы асинхронных машин целесообразно исследовать с помощью метода симметричных составляющих, пренебрегая насыщением и пользуясь методом наложения. Составляющие нулевой последовательности в токах обмоток асинхронных двигателей обычно не возникают, так как нулевые точки этих обмоток, если обмотки соединены в звезду, обычно изолированы. Поэтому следует рассмотреть поведение асинхронных машин по отношению к составляющим напряжений и токов прямой и обратной последовательности. Работа асинхронной машины при несимметрии приложенных напряжений. Пусть система трехфазных напряжений, приложенных к первичной обмотке асинхронной машины, несимметрична и содержит составляющие прямой (Un) и обратной (£ /12) последовательности. Все изложенное в предыдущих главах относилось к асинхронной машине с напряжениями и токами прямой последовательности. Повторим здесь вкратце полученные выше результаты, введя дополнительный индекс 1 для обозначения прямой последовательности, а затем распространим эти результаты на напряжения и токи обратной последовательности (с дополнительным индексом 2).
Рис. 29-14. Схемы замещения асинхронной машины для токов и напряжений прямой (а) и обратной (б) последовательности Напряжения Un вызывают в первичной цепи машины токи прямой последовательности 1п. Эти токи создают магнитное поле и поток прямой последовательности, которые вращаются со скоростью и индуктируют токи прямой последовательности /21 во вторичной обмотке. Токи 1и и /21 создают общее магнитное поле прямой последовательности, вращающееся со скоростью nv Скольжение ротора относительно этого поля есть скольжение прямой последовательности: где п — скорость вращения ротора, положительная в случае, когда ротор вращается в сторону поля прямой последовательности. Для системы токов и напряжений прямой последовательности действительна схема замещения рис. 29-14, а, которая идентична со схемами замещения рис. 24-6. Эта схема позволяет рассчитать токи 1п и /ji, если известны Uu и параметры машины.
Необходимо отметить, что, кроме моментов Мг и М%, в результате взаимодействия токов обратной последовательности ротора с прямым полем и взаимодействия токов прямой последовательности ротора с обратным полем возникают также добавочные составляющие вращающего момента. Однако эти добавочные моменты пульсируют с большой частотой, равной 2flt и средняя величина их равна нулю. Поэтому они практически не оказывают влияния на движение ротора-. Вместе с тем в результате взаимодействия прямых и обратных полей возникают вибрационные радиальные силы частоты 2/х. Надо также отметить, что в общем случае параметры вторичной цепи r'i и х'а2 для токов прямой и обратной последовательности различны, так как частоты этих токов fn = sfi, fn = (2 —s)^ неодинаковы й влияние вытеснения тока сказывается поэтому в различной степени. Это обстоятельство необходимо учитывать при практических расчетах. На рис. 29-15 изображены кривые моментов Мъ Ма и М для случая, когда ип и и и постоянны по величине и U12/Uu = 0, 5. Ввиду преобладания составляющей прямой последовательности режим работы машины а целом определяется действием этой составляющей. Как видно из рис. 29-15, под влиянием токов обратной последовательности результирующий момент двигателя М снижается, скольжение при том же моменте сопротивления на валу Мст увеличивается и, следовательно, увеличиваются потери и нагрев машины, а также уменьшается к. п. д. Все это является следствием тогоГ что по отношению к системе обратной последовательности мащина при 0 < s < 1 работает в тормозном режиме (1 < sa < 2). Из сказанного следует, что наличие токов обратной последовательности ухудшает условия работы асинхронных двигателей, й поэтому искажение симметрии системы питающих напряжений нежелательно. Однако в ряде случаев несимметричные режимы используются в специальных целях. Несимметрия сопротивлений во вторичной цепи может возникать в результате различных неисправностей (например, отсутствие контакта в цепи одной фазы трехфазного ротора или обрыв одного или нескольких стержней короткозамкнутого алюминиевого ротора вследствие дефектов литья). Иногда для уменьшения числа контак-
Рис 29-15 Моменты прямой (Mt) и обратной {М2) последовательности и результирующей момент (М) асинхронной машины в функции скольжения тов реостата или контроллера при сохранении достаточно большого числа ступеней пуска применяются также несимметричные пусковые реостаты, в которых переключение ступеней реостата в разных фазах производится неодновременно. Например, если каждая фаза трехфазного пускового реостата имеет п — 2 ступени и переключение ступеней в каждой фазе производится одновременно, то получим 2+1=3 ступени пуска. Если же ступени каждой фазы переключить поочередно, то получим 2-3+1 = 7 ступеней пуска. В последнем случае большое количество ступеней пуска достигается при относительно простой и дешевой пусковой аппаратуре. Рассмотрим, как влияет несимметрия цепи ротора на работу двигателя. Предположим при этом, что обмотка ротора является трехфазной. Симметричная система напряжений сети Ux вызывает в обмотке статора токи 1г ~ 1п частоты сети fv Вращающееся поле прямой последовательности, созданное этими токами, индуктирует в фазах ротора э. Д. с Е% частоты /3 = sh- Вследствие неравенства сопротивлений отдельных фаз токи в фазах ротора будут неодинаковы, и их можно разложить на токи прямой (/21) и обратной (1п) последовательности. Токи прямой последовательности ротора 1п частоты sfx создают прямое поле, вращающееся синхронно с полем токов 1Х = 1и статора, вследствие чего образуется результирующее, или общее, прямое поле двигателя. В результате взаимодействия этого поля с токами ротора /г1 создается вращающий момент прямой последовательности Mi, который имеет ту же природу, что и обычный момент двигателя при cHMMetpH4HOM режиме работы. Токи обратной последовательности ротора /22 также имеют частоту /s =» sft и создают поле, вращающееся со скоростью
которые замыкаются через сеть и накладываются на токи /ц частоты fv Так как в самой первичной сети нет напряжений и э. д. с. частоты /w и сопротивление сети по отношению к сопротивлению обмоток двигателя мало, то можно считать, что обмотка статора по отношению к токам /13 замкнута накоротко. Токи ротора /32 и статора /12 создают общее вращающееся поле, и при взаимодействии этого поля с током ротора /2а возникает действующий на ротор момент Мг. Общий действующий на ротор вращающий момент При скольжениях 0, 5< s< 1, согласно равенству (29-11), имеем л2 < 0, т. е. обратное поле вращается относительно статора в отри- Рис. 29-16. Кривые вращающих моментов асинхронного двигателя при несимметрии сопротивлений в фазах (а) и при разрыве цепи одной фазы (б) обмотки ротора дательном направлении. Однако создаваемый при этом момент М2 действует в положительном направлении (М2 > 0), в результате чего и сам ротор вращается против направления вращения поля. Эти явления вполне аналогичны явлениям в асинхронном двигателе с питанием со стороны ротора, когда движение ротора также происходит против направления поля. При скольжениях 0 < s < < 0, 5 [см. выражение (29-11)] имеем п3 > 0, т. е. обратное поле вращается в положительном направлении, вследствие чего М2 < < 0. При s = 0, 5 [см. выражение (29-11)1 п% = 0, обратное поле неподвижно относительно статора, поэтому токи /12 в статоре не индуктируются и М2 = 0. Характер кривой момента М2 = f (s) представлен на рис. 29-16, а. Там же показан характер кривой Мх = f (s) и М = Мх -f- M2 = = f (s). Кривая момента Мх имеет в области s = 0, 5 провал в связи с тем, что при s = 0, 5 ток /12 = 0, размагничивающее действие токов /1а по отношению к полю токов ротора /22 отсутствует (режим идеального холостого хода), поэтому индуктивное сопротивление
токам /22 велико, вследствие чего величины всех токов /22, h\ и /х = /п при s « 0, 5 уменьшаются. В связи со сказанным выше кривая моментов М = f (s) двигателя также имеет в области s = 0, 5 провал. При значительной несимметрии сопротивлений вторичной цепи величина этого провала может оказаться настолько большой, что двигатель при пуске «застрянет» на скорости п та 0, 5 пх и не достигнет нормальной скорости вращения. Токи обмоток при этом будут велики и опасны для двигателя. Если одна из трех фаз ротора имеет обрыв, то величина М в области s — 0, 5 будет даже отрицательной (рис. 29-16, б) и двигатель не достигнет нормальной -скорости вращения даже при пуске на холостом ходу. Такое явление впервые было описано Г. Гергесом в 1896 г. и называется эффектом Гергеса или эффектом одноосного включения. При увеличении активных сопротивлений цепи ротора, например, с помощью реостата кривая момента при обрыве одной фазы цепи ротора становится более благоприятной. |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 1748; Нарушение авторского права страницы