|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение параметров движения твердого тела
Задание Движение груза А задано уравнением y = at Цель работы – подставив заданные коэффициенты в общее уравнение движения, определить вид движения. Определить скорость и ускорение груза в моменты времени t
Теоретическое обоснование Точки тела движутся по окружностям вокруг неподвижной оси (ось вращения). Закон равномерного вращательного движения: φ = φ Закон равнопеременного вращательного движения: φ = φ Закон неравномерного вращательного движения: φ = f(t Здесь φ – угол поворота тела за время t, рад; w – угловая скорость, рад/с; φ w ε - угловое ускорение, рад/с Угловая скорость: w = Угловое ускорение: ε = Кинематические графики вращательного движения представлены на рис. 3.1а, б.
А б Рис.3.1
Число оборотов вращения тела: z = φ (2π ). Угловая скорость вращения: n, об/мин. w =
Параметры движения точки вращающегося тела (рис.3.2): v – линейная скорость точки В v = wr, м/с; (3.5) a a а а
Порядок выполнения работы
1. Определить вид движения, подставив заданные коэффициенты в общее уравнение движения. 2. Определить уравнения скорости и ускорения груза. 3. Определить полное число оборотов шкива. 4. Определить нормальное и касательное ускорения точки на ободе шкива в указанные моменты времени. 5. Ответить на контрольные вопросы.
Контрольные вопросы 1. В чем заключается принцип кинетостатики? 2. Могут ли при поступательном движении тела траектории его точек не прямыми линиями? 3. Равна ли скорость перемещения груза скоростям точек на ободе вращающегося шкива? 4. Как повлияет на скорость груза увеличение диаметра шкива при неизменной угловой скорости? 5. Какое ускорение (касательное или нормальное) характерно для точек вращающегося тела?
Пример выполнения Для перемещения груза применена барабанная лебедка, привод которой состоит из электродвигателя 1 и редуктора 2 (понижает угловую скорость вала двигателя до требуемой на барабане). Барабан 3 служит для преобразования вращательного движения в поступательное движение груза. Диаметр барабана d = 0, 2 м, а уравнение его вращения φ = 30t + 6t
1. Определяем кинематические характеристики движения барабана. Угол поворота барабана за время t Угловая скорость барабана w = Угловое ускорение барабана ε = 2. Кинематические характеристики движения любой точки на ободе барабана, например точки А, определяются через угловые характеристики движения барабана. Для момента времени t Скорость точки v 3. Кинематические характеристики груза равны соответствующим характеристикам любой точки тягового троса, а значит, и точки А, лежащей на ободе барабана.
Литература:
Таблица 3.1
Практическая работа № 4 Работа и мощность. Общие теоремы динамики Задания Скорость кабины лифта массой m изменяется согласно графикам (рис.4.4). Используя принцип Даламбера определить натяжение каната кабины лифта на каждом участке движения. Определить максимальное натяжение каната. По максимальному натяжению каната определить максимальную потребную мощность для подъема груза. По заданной величине КПД механизма определить максимальную мощность двигателя (табл. 4.1). Цель работы – научиться рассчитывать мощность с учетом потерь на трение и сил инерции, определять параметры движения с помощью теорем динамики Теоретическое обоснование Принципом Даламбера называют метод, позволяющий решать задачи динамики приемами статики.Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы». Работа служит мерой действия силы, работа – скалярная величина. Работа постоянной силы. Работа постоянной по модулю и направлению силы при прямолинейном перемещении определяется скалярным произведением вектора силы на вектор перемещения точки ее приложения. A = F S cos ( Работа силы трения: AFтр = Fтр S cos ( Работа силы, приложенной к вращающемуся твердому телу: А = Для характеристики работоспособности и быстроты совершения работы введено понятие мощности Мощность при поступательном движении P=Fυ cos α (4.4) где F- постоянная сила, H; υ – скорость движения, м/с; α - угол между направлениями силы и перемещения. Мощность при вращение P=Mω, (4.5) где М – вращающий момент, Н*м; ω – угловая скорость, рад/с. Коэффициент полезного действия КПД=Рпол/Рзатр (4.6) где Рпол – полезная мощность, Вт; Рзатр – затраченная мощность, Вт. Сила инерции F = - ma (4.7) где а – ускорение точки, м/с; m – масса, кг. Основные уравнения динамики Поступательное движение твёрдого тела: F = ma/ Вращательное движение твёрдого тела: Mz = τ ε где Mz - суммарный момент внешних сил относительно оси вращения, кг*м; ε – угловое ускорение, рад/с.
Порядок выполнения работы 1. Используя принцип Даламбера определить натяжение каната кабины лифта на каждом участке движения. 2. Определить максимальное натяжение каната. 3. По максимальному натяжению каната определить максимальную потребную мощность для подъема груза. 4. По заданной величине КПД механизма определить максимальную мощность двигателя. 5. Ответить на контрольные вопросы.
Контрольные вопросы
Пример выполнения График изменения скорости лифта при подъеме известен (рис.4.1). Масса лифта с грузом 2800 кг. Определить натяжение каната, на котором подвешен лифт на всех участках подъема. Решение
Где Т – натяжение каната; G – сила тяжести; F Для определения ускорения на участке 1 учтем, что движение на этом участке равнопеременное, скорость Следовательно, ускорение:
Определяем усилие натяжения каната при подъеме с ускорением 2800(9, 81 + 1, 25) = 30968 Н; Т
Т
Уравнение равновесия: Ускорение (замедление) на этом участке определяется с учетом того, что v = 0.
Натяжение каната при замедлении до остановки:
Таким образом, натяжение каната меняется при каждом подъеме и опускании, канат выходит из строя в результате усталости материала. Работоспособность зависит от времени.
Рис.4.1 Рис.4.2 Рис.4.3 Рис. 4.4
Таблица 4.1
Практическая работа № 5 |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 4091; Нарушение авторского права страницы
 + bt + c, где [y] = м, [t] = c.
+ bt + c, где [y] = м, [t] = c. и t
и t  , а также скорость и ускорение точки В на ободе барабана лебедки (рис.3.3 и табл.3.1).
, а также скорость и ускорение точки В на ободе барабана лебедки (рис.3.3 и табл.3.1). + wt. (3.1)
+ wt. (3.1) (3.2)
(3.2) ).
). ; w = w
; w = w  .
.
 (3.4)
(3.4) Рис.3.2
Рис.3.2  - касательное ускорение точки В
- касательное ускорение точки В - нормальное ускорение точки В
- нормальное ускорение точки В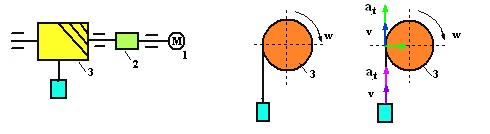

 Рис. 3.3
Рис. 3.3  ) = F S cosα (4.1)
) = F S cosα (4.1) ) = fтр NS cos180 = - fтрNS (4.2)
) = fтр NS cos180 = - fтрNS (4.2) = A = Mz φ . (4.3)
= A = Mz φ . (4.3)


 - сила инерции, растягивающая канат.
- сила инерции, растягивающая канат.



 ;
; 
 , отсюда
, отсюда 
 ;
;