
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОБНАРУЖЕНИЕ РАДИОЛОКАЦИОННЫХ СИГНАЛОВСтр 1 из 6Следующая ⇒
ОГЛАВЛЕНИЕ
1. Обнаружение радиолокационных сигналов 4 2. Радиолокационный обзор. Методы обзора пространства 10 3. Радиолокационные методы измерения дальности 16 4. Разрешающая способность РЛС по дальности, направлению и скорости 24 5. Системы селекции движущихся целей Измерение радиальной скорости импульсными РЛС 30 6. Основное уравнение радиолокации 37 7. Пассивные помехи РЛС 45 8. Активные помехи РЛС и системам связи 52 Библиографический список 60
Задачи . Проанализировать зависимость полной вероятности ошибки а) D=0, 99 и F=0, 01; б) D=0, 9 и F=0, 01; в) D=0, 99 и F=0, 1. 1.2. Приняв, что априорные сведения о наличии цели отсутствуют ( а) максимальной вероятности принятия правильного решения при обнаружении цели; б) максимальной вероятности ошибки. 1.3. Пояснить физический смысл ситуации, соответствующей обнаружению сигнала с полностью известными параметрами. Каково практическое значение анализа ситуации? 1.4. Пользуясь характеристиками обнаружения приемника (см. рис.1), оценить требуемые значения отношения сигнал/шум q при обнаружении полностью известного сигнала. Принять значение вероятности правильного обнаружения D равными 0, 5, 0, 9 и 0, 99, а вероятность ложной тревоги F - 10-3 и 10-6. 1.5. Оценить требуемое увеличение отношения сигнал/шум при переходе от обнаружения полностью известного сигнала к обнаружению сигнала с неизвестной начальной фазой и флуктуирующей амплитудой. Принять D=0, 9 и 0, 95, F=10-4 и 10-8. 1.6. Оценить, насколько незнание начальной фазы сигнала заставляет увеличить отношение сигнал/шум при D=0, 5; F=0, 1 и D=0, 9; F=10-4. 1.7. Пояснить физический смысл значения вероятности ложной тревоги применительно к обнаружению цели на индикаторе с яркостной отметкой. 1.8. Какие параметры принимаемых сигналов и почему нужно считать неизвестными в общем случае обнаружения цели? 1.9. Определить требуемое значение отношения сигнал/шум q и коэффициента различимости kр, если необходимо обеспечить обнаружение цели когерентной РЛС при D=0, 9 и F=10-3 по пачке из 2000 импульсов. Произведение всех коэффициентов потерь принять равным 10. 1.10. Определить суммарные потери в импульсной некогерентной РЛС при приеме 25 прямоугольных импульсов и использовании автоматического съема данных. Резонансная характеристика усилителя промежуточной частоты гауссовой формы. 1.11. Определить суммарные потери в импульсной некогерентной РЛС при приеме 50 прямоугольных импульсов и использовании обнаружения цели оператором. Резонансная характеристика усилителя промежуточной частоты формируется одиночным резонансным контуром. 1.12. Определить требуемое значение коэффициента различимости kр, если необходимо обеспечить обнаружение цели некогерентной РЛС при D=0, 95 и F=10-6 по пачке из 15 прямоугольных импульсов. В РЛС используется автоматический съем данных. Резонансная характеристика усилителя промежуточной частоты имеет идеально прямоугольную форму. 1.13. Где и каким образом накапливаются сигналы от цели в импульсной некогерентной станции с индикаторным выходным устройством при яркостной отметке?
РАДИОЛОКАЦИОННЫЙ ОБЗОР. МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА В большинстве радиолокационных систем, прежде чем производить измерение координат и параметров движения, цель необходимо найти.Процесс поиска радиолокационных целей называется радиолокационным обзором. Поиск цели производится перемещением луча в некоторой области, называемой зоной обзора станции. Характеристики радиолокационного обзора в большой степени зависят от вида диаграммы направленности антенны РЛС. Диаграммой направленности F2(φ АЗ, φ УМ) по мощности называется график зависимости плотности мощности ρ излучаемой волны от направления распространения при постоянном расстоянии до точек наблюдения. На практике часто вместо пространственной диаграммы направленности пользуются плоскими диаграммами, представляющими собой сечение поверхности F(φ АЗ, φ УМ) двумя главными плоскостями - горизонтальной и вертикальной. Угол θ 0, 5 - представляет собой ширину диаграммы направленности по уровню половинной мощности. Антенны РЛС имеют диаграммы направленности двух основных видов: иглообразные и веерные (плоские). Иглообразными называются диаграммы, у которых ширина по уровню половинной мощности приблизительно одинакова для обоих главных сечений. Веерные диаграммы характеризуются существенным различием ширины в главных сечениях. Периодом обзора Тобз называется время, требуемое для однократного облучения всех точек зоны обзора, и обеспечения возможности приема сигналов из этих точек. Временем облучения Тобл точечной цели называется время, протекающее с момента начала излучения радиоволн в направлении данной цели до конца приема сигналов от этой цели. За время Тобл накапливается энергия принимаемых сигналов, необходимая для обнаружения сигналов, оценки их параметров, разрешения и т. д. Соответственно, за время облучения цели Тобл на вход приемника РЛС должно поступить не менее N отраженных от цели эхо-сигналов. В свою очередь число накопленных эхо-сигналов зависит от периода повторения зондирующих импульсов РЛС Тп
При этом, при условии однозначного измерения дальности, период повторения зондирующих импульсов не может быть меньше, чем максимальное время задержки отраженных эхо-сигналов.
Теоретически период последовательного обзора равен
где DD – участок дальности, просматриваемый в каждый данный интервал Тобл, θ АЗ и θ УМ – значения ширины луча по уровню половинной мощности в горизонтальной и вертикальной плоскостях. Если за время Тобл просматриваются цели на всей дальности действия РЛС, то теоретически значение периода последовательного обзора равно
В реальных системах обзора время облучения цели существенно изменяется по зоне обзора (например, вследствие изменения скорости движения луча на краях зоны сканирования). В результате реальный период обзора Тобз часто оказывается большим теоретически необходимого Т0обз. Отношение этих двух величин называют относительным периодом обзора Кобз. С учетом коэффициента Кобз формулы (22) и (23) для реального периода обзора можно записать следующим образом: при просмотре дальности по частям отрезками DD
при просмотре всей дальности сразу
Значения величины Кобз для некоторых видов обзора приведены в таблице 2. Таблица 2
При круговом обзоре плоским лучом период обзора и время облучения соответственно равны:
где Wа – угловая скорость вращения луча РЛС, град/с. При использовании секторного обзора, если известно среднее значение угловой скорости Wср перемещения луча шириной θ 0, 5 в требуемом направлении в пределах сектора Ф, то
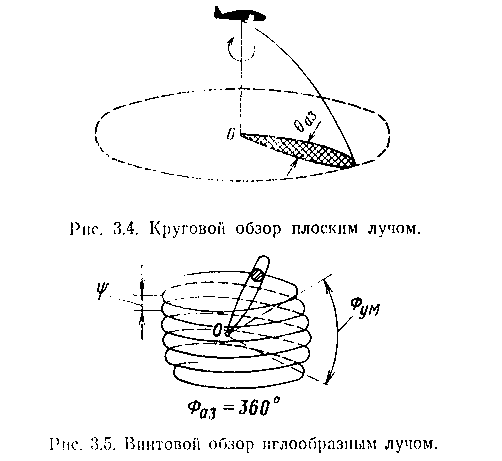
Рис. 3. Винтовой обзор иглообразным лучом
При винтовом обзоре иглообразным лучом (рис. 3)
где Wгор – угловая скорость перемещения луча в горизонтальной плоскости; Ψ – шаг луча в вертикальной плоскости, т. е. изменение угла места оси луча при его повороте на 360° по азимуту; Ψ = (0, 5... 0, 8)θ ум.
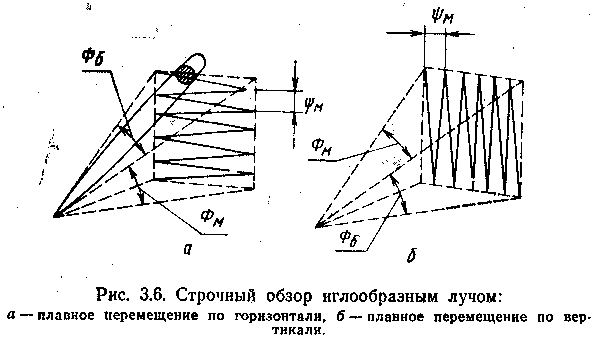
Рис. 4. Строчный обзор иглообразным лучом: а – плавное перемещение по горизонтали, б – плавное перемещение по вертикали
При строчном обзоре иглообразным лучом (рис. 4)
где Ψ М – шаг луча в направлении медленного перемещения; Фб, ФМ – секторы обзора в направлении быстрого и медленного перемещения луча; Wср – среднее значение угловой скорости быстрого перемещения луча; θ б, θ М – ширина диаграммы направленности антенны (ДНА) в направлении быстрого и медленного перемещения. При спиральном обзоре (рис. 5, а)
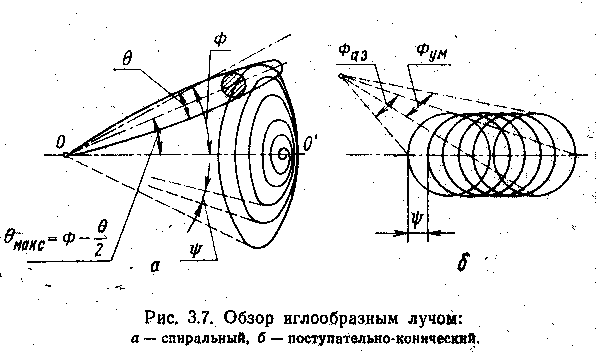
где Твр – период вращения луча вокруг оси ОО', принимаемый постоянным, Ф – половина сектора обзора, θ 0, 5 – ширина симметричного иглообразного луча; Ψ = (0, 5... 0, 8)θ 0, 5 шаг луча.
Рис. 5. Обзор иглообразным лучом: а – спиральный, б – поступательно-конический
Угловое перемещение β луча за один оборот вокруг оси ОО' равно:
где α – угол отклонения оси луча от оси ОО'. Угловая скорость луча
Время облучения цели при α ³ 0, 5θ 0, 5
Припоступательно-коническом обзоре (рис. 5, б)
где Твр – период конического вращения; ФАЗ – сектор обзора по азимуту; θ 0, 5 – ширина симметричного иглообразного луча; Ψ – шаг траектории в направлении поступательного движения, равный (0, 5... 0, 8) θ 0, 5. Угловая скорость луча и время облучения цели соответственно находятся по формулам:
где ФУМ – сектор обзора по углу места.
Задачи 2.1. Определить скорость вращения антенны РЛС кругового обзора, если время обзора 6 с. 2.2. Определить время обзора РЛС с круговым методом обзора и количество импульсов, попадающих на цель за время прохода ее лучом, если скорость вращения антенны 15 об/мин, ширина ДНА в азимутальной плоскости 3, 5°, частота повторения зондирующих импульсов 700 Гц. 2.3. Определить расстояние, которое пролетает самолет в направлении РЛС кругового обзора за время между двумя очередными отметками импульсов, полученных при облучении цели, если скорость вращения антенны 5 об/мин, а скорость самолета 1200 км/ч. 2.4. Определить частоту повторения зондирующих импульсов РЛС при строчном методе обзора, если ширина ДНА по азимуту равна 3°, а по углу места 5°. Сектор поиска ограничен углами обзора по азимуту 60°, по углу места 40°. На цель должно попасть не менее 20 импульсов за время обзора 5 с. 2.5. Определить количество импульсов, попадающих на цель за время прохода через нее луча в РЛС кругового обзора, если скорость вращения антенны 40 об/мин, ширина ДНА по азимуту 4°, частота повторения зондирующих импульсов 500 Гц. 2.6. В РЛС кругового обзора антенна вращается со скоростью 10 об/мин. Ширина ДНА в азимутальной плоскости 2°. Определить максимальное расстояние, на котором может находиться цель, чтобы за время одного оборота антенны на цель попало не менее 12 импульсов. 2.7. Найти время обзора пространства и минимальное количество импульсов, принятых приемником РЛС, если РЛС винтового обзора имеет следующие характеристики: ширина ДНА по азимуту и углу места 4°, частота повторения зондирующих импульсов 3 кГц, ширина сектора поиска по углу места 60°, а шаг луча в угломестной плоскости равен 0, 8Qb. Необходимое время облучения цели 0, 01 с. 2.8. Найти время обзора заданного сектора и максимальную дальность до цели РЛС со сканированием по азимуту и углу места, если ширина ДНА по азимуту 3°, по углу места 4°. Сектор поиска цели по азимуту составляет 50°, по углу места 60°. Частота сканирования антенны 0, 5 Гц, частота повторения зондирующих импульсов 1 кГц, а количество импульсов, попадающих на цель должно быть не менее 20. 2.9. Определить частоту повторения зондирующих импульсов РЛС при круговом методе обзора, если ширина ДНА по азимуту составляет 5°. На цель должно попасть не менее 10 и не более 50 импульсов за время обзора пространства 1с. 2.10. В РЛС используется винтовой обзор пространства. Определить период обзора при условии, что сектор обзора по углу места равен 45°. Обзор ведется симметричным иглообразным лучом шириной ДНА 5°, частота повторения зондирующих импульсов 5 кГц, максимальное число импульсов, отраженных от точечной цели равно 10. Определить минимальное число импульсов, принимаемое от цели, если шаг луча в вертикальной плоскости составляет 0, 7Qb ширины ДНА. 2.11. В РЛС сопровождения с коническим сканированием используется луч круглого сечения шириной 5°. Ось вращения отклонена от оси луча на угол 0, 5 Q0, 5. Луч совершает 40 об/с. Определить время облучения цели в течение каждого оборота луча, если принять, что цель отклонена от оси вращения на угол 0, 5 Q0, 5. 2.12. В РЛС для обеспечения разрешения по дальности применяют временное стробирование приемника. Определить период обзора подобной станции, если длительность стробирующих импульсов равна 0, 5 мкс, применен секторный обзор (сектор поиска по азимуту равен 180°, ширина ДНА по азимуту составляет 2°). Время облучения точечной цели равно 0, 02 с. Протяженность просматриваемой зоны по дальности 30 км. 2.13. Чему равен угол поворота антенны РЛС за время, равное времени задержки отраженного от цели сигнала. Цель находится на расстоянии 350 км от РЛС. Скорость вращения антенны РЛС составляет 6 об/мин. 2.14. Разрабатывается наземная РЛС для измерения высоты обнаруживаемых самолетов. В станции используется плоский горизонтальный луч (ширина ДНА в угломестной плоскости много меньше, чем ширина ДНА в азимутальной). Как лучше расположить строки обзора: вертикально или горизонтально? 2.15. Определить, достаточное ли количество импульсов будет попадать на цель за один оборот антенны, если ширина диаграммы направленности антенны равна 3°, скорость вращения антенны 28 об/мин, частота повторения зондирующих импульсов 1200 Гц. Цель обнаруживается при накоплении не менее 20 импульсов. 2.16. Какая из двух радиолокационных систем характеризуется меньшим временем обнаружения цели? Первая радиолокационная система имеет узкий иглообразный луч, сканирующий по азимуту на 360° и углу места (винтовой обзор). Вторая состоит из двух РЛС – кругового обзора и высотомера. 2.17. Размер отметки цели на экране индикатора РЛС lц соответствует одному километру. В каких пределах может измеряться период обзора Тобз, если требуется обеспечить плавное перемещение отметок по экрану индикатора при скоростях движения целей до 1200 км/ч. Предположить, что для обеспечения плавности перемещения отметка от цели не должна смещаться за период повторения более чем на lц. 2.18. Для надежного обнаружения цели на фоне помех оператор РЛС должен трижды увидеть ее отметку. Определить допустимые пределы изменения периода обзора Тобз РЛС обнаружения, если дальность действия станции составляет 100 км; сокращение дальности обнаружения целей, вызванное троекратным наблюдением их отметок, не должно превышать 0, 05Dmax; максимальная скорость целей достигает 3000 км/ч. 2.19. Определить, во сколько раз изменяется время облучения точечной цели при спиральном обзоре, если используется иглообразный луч шириной 4°, а угол отклонения оси луча от оси вращения меняется от 3° до 35°. 2.20. Для просмотра зоны, угловые размеры которой равны Fаз=360° и Fум, можно использовать круговой обзор плоским лучом (Qаз< < Qум, Qум =Fум) и винтовой обзор симметричным иглообразным лучом (Qаз=Qум). Каковы основные характеристики, преимущества и недостатки обоих методов обзора, если произведение угловых размеров луча остается неизменным (QазQум=const)? 2.21. При поиске цели по дальности в системе автоматического дальномера за время прохождения каждого временного строба дальномера мимо сигнала цели принимается 20 отраженных импульсов. Чему равно время поиска на интервале 20 км, если ширина стробов равна DD=200 м, а частота повторения зондирующих импульсов РЛС равна 1400 Гц?
Задачи 3.1. Каким дальностям до целей соответствует время задержки отраженных сигналов 2 мкс, 5 мс, 1 с, 3 мин? 3.2. Определить время задержки отраженного импульса и максимальную частоту повторения зондирующих импульсов при определении дальности до Луны (среднее расстоянии до Луны равно 385 000 км). 3.3. Частота повторения зондирующих импульсов РЛС равна 1000 Гц. Показать, как расположатся на линии развертки отметки отраженных от целей импульсов, если момент излучения совпадает с началом развертки, длительность прямого хода развертки 700 мкс, а цели находятся на расстоянии соответственно 50 км, 75 км, 90 км и 125 км. 3.4. Максимальная дальность действия самолетной РЛС составляет 70 км. Определить частоту повторения зондирующих импульсов, если известно, что промежуток времени между концом развертки и началом следующей равен 533, 4 мкс. 3.5. Передатчик радиолокационной системы формирует радиоимпульсы длительностью 2 мкс. Максимальная дальность обнаружения РЛС составляет 150 км. Определить суммарное время излучения передатчика РЛС за 8 часов ее работы. 3.6. Длина линии развертки индикатора радиолокационной станции составляет 125 мм. Максимальная дальность действия РЛС 150 км. Определить дальность до цели, если отраженный импульс находится на расстоянии 50 мм от начала линии развертки, а луч перемещается линейно. 3.7. Длительность импульса самолетной радиолокационной системы 2 мкс. Определить, какой участок линии развертки занимает импульс на экране электронно-лучевой трубки, если линия развертки длиной 100 мм соответствует дальности 10 км. 3.8. Максимальная дальность действия радиолокационной станции равна 200 км. Какова скорость движения луча по экрану электронно-лучевой трубки, если длина линии развертки 50 мм? 3.9. В радиолокационной станции используется импульсный метод определения дальности. Определить расстояние до цели, если отметка на экране индикатора дальности находится на расстоянии 40 мм от начала линии развертки, период развертки равен 2000 мкс, развертка прямолинейная и равномерная, рабочий диаметр экрана электронно-лучевой трубки индикатора 100 мм. 3.10. Период повторения зондирующих импульсов РЛС в несколько раз меньше максимального времени задержки отраженных сигналов. Чему равно время задержки отраженных сигналов, измеряемое подобной РЛС? Поясните графически. 3.11. На какой дальности будет находиться отметка от цели на индикаторе кругового обзора, если частота повторения зондирующих импульсов равна 12 кГц, а истинная дальность до цели 18 км? 3.12. Определить абсолютную и относительную ошибки измерения дальности до цели цифровым дальномером (см. рис.12), если цель находится на максимальной дальности обнаружения 120 км. Тактовая частота Fтакт, используемая в дальномере, равна 20 МГц. Объяснить принцип работы цифрового дальномера. Какова должна быть разрядность счетчика дальномера?
Рис. 12. Функциональная схема цифрового дальномера 3.13. На экране индикатора дальности имеются отметки двух целей. Время запаздывания сигналов одной из них превышает период повторения зондирующих импульсов РЛС, и ее дальность отображается неправильно. Изменение частоты повторения зондирующих импульсов в небольших пределах позволяет определить, какая из отметок занимает ложное положение на индикаторе дальности, а какая – правильное. Объясните этот эффект. 3.14. В РЛС используется частотный метод определения дальности. Определить дальность до цели, если разностная частота прямого и отраженного сигнала 7200 Гц, девиация частоты 10 МГц, а частота модуляции 120 Гц. 3.15. Радиовысотомер малых высот имеет два диапазона: 0 – 120 м и 0 – 1200 м. Девиация частоты для первого диапазона равна 40 МГц. Определить девиацию частоты для второго диапазона, если период модуляции не изменяется, а разностные частоты прямого и отраженного сигналов одинаковы для обоих диапазонов. 3.16. В радиовысотомере малых высот используется частотная модуляция. При этом частота сигнала равна 60 МГц, частота модуляции равна 150 Гц. Определить разностную частоту на высоте 100 м. Какой должна быть частота модуляции, чтобы на высоте 1000 м разностная частота осталась бы такой же, как на высоте 100 м? 3.17. Для полета в горной местности на самолете установлена РЛС с частотной модуляцией. Станция служит для предупреждения столкновений с препятствиями. Определить ошибку в показаниях РЛС по дальности, обусловленную эффектом Допплера, если радиальная скорость самолета 1260 км/ч, девиация частоты 2 МГц, период модуляции 0, 01 с, средняя несущая частота 444 МГц. 3.18. Два радиовысотомера характеризуются равными частотами модуляции 8 кГц и девиацией частоты 7 МГц, но разными законами модуляции: первый – пилообразный симметричный, второй – пилообразный несимметричный. Определить однозначно измеряемую высоту первого и второго радиовысотомеров и значения максимальной разностной частоты при положении самолета на максимальной высоте. 3.19. При использовании двухчастотного фазового дальномера разность фаз колебаний, подводимых к фазовому детектору, составляет 36°, дальность до цели равна 40 км. Определить разность частот дальномера. 3.20. Определить применительно к условиям предыдущей задачи максимально возможные значения несущих частот дальномера, если относительная стабильность генераторов несущих частот равна 10-7, а допустимые ошибки измерения дальности не должны превышать 3%. 3.21. Можно ли использовать двухчастотный фазовый дальномер при наличии нескольких целей? 3.22. Определить наивысшую частоту синусоидальной модуляции незатухающих колебаний фазового дальномера, если максимальная дальность до цели равна 150 км.
НАПРАВЛЕНИЮ И СКОРОСТИ Разрешающая способность – одна из важнейших характеристик радиолокационных систем, определяющая способность раздельного наблюдения целей, имеющих малое различие в дальности, угловых координатах и скорости. Реальная разрешающая способность РЛС по какой-либо координате может быть представлена в виде
где δ (α )пот – потенциальная разрешающая способность, определяемая, формой сигнала и отношением энергии сигналов и шума; δ (α )i – ухудшение разрешающей способности в i-м узле устройства обработки сигнала; n – количество узлов устройства обработки сигнала. Обычно наибольшие ухудшения вносит выходное устройство, поэтому можно принять
При использовании в выходных устройствах электронно-лучевых трубок наибольшее ухудшение разрешающей способности вносится за счет конечных размеров пятна на экране (мишени). При автоматическом съеме координат в устройстве, сопрягающем РЛС с цифровой вычислительной машиной, реальная разрешающая способность определяется ценой интервала эталонных (счетных) импульсов. Разрешающая способность по дальности – минимальное расстояние между двумя целями, имеющими относительно РЛС одинаковые угловые координаты, при котором еще возможно раздельное наблюдение этих целей. Разрешающая способность по дальности складывается из двух составляющих: а) δ (D)пот – потенциальная, т. е. максимально достижимая для данной РЛС разрешающая способность; б) δ (D)инд – индикаторная разрешающая способность, обусловленная характеристикой индикатора. Потенциальная разрешающая способность по дальности δ (D)пот определяется длительностью зондирующего сигнала и его формой. Величина потенциальной разрешающей способности по дальности для прямоугольного сигнала определяется формулой
Величина потенциальной разрешающей способности по дальности для гауссовского сигнала определяется формулой
Величина потенциальной разрешающей способности по дальности для сигнала в виде импульса гауссовой формы с внутриимпульсной линейной частотной модуляцией равна
где Индикаторная разрешающая способность по дальности δ (D)инд зависит от размера электронного пятна на индикаторе. Чем меньше размер электронного пятна, тем лучше разрешающая способность. Для индикатора кругового обзора индикаторная разрешающая способность определяется следующим образом:
где Диаметр рисующего пятна в свою очередь может быть найден как Таким образом, реальная разрешающая способность по дальности определяется следующим образом:
Разрешающая способность по угловым координатам (азимуту и углу места) – это минимальный угол между двумя целями, находящимися на одной дальности относительно РЛС, при которой еще возможно их раздельное наблюдение. Аналогично разрешающей способности по дальности, разрешающая способность по угловым координатам складывается из двух составляющих: а) δ (a)пот, δ (b)пот – потенциальной разрешающей способности по азимуту и углу места соответственно и б) δ (a)инд, δ (b)инд – индикаторной разрешающей способности по азимуту и углу места соответственно. Потенциальная разрешающая способность по угловым координатам для обзорной РЛС при аппроксимации диаграммы направленности гауссовой кривой равна δ (a)пот=1, 3Q0, 5 , (61) а при прямоугольной аппроксимации δ (a)пот=Q0, 5, (62) где θ 0, 5 – ширина диаграммы направленности антенны в плоскости разрешения на уровне 0, 5. Индикаторная разрешающая способность по угловым координатам δ (a)инд, δ (b)инд зависит от дальности цели от начала развертки.
где Dшк – отображаемая дальность шкалы индикатора; Dц – дальность до цели; Dз – расстояние, соответствующее задержке начала развертки индикатора по дальности. Для уменьшения индикаторной составляющей разрешающей способности может применяться так называемый открытый центр развертки индикатора (Dз< 0). В некоторый случаях, например, при нахождении цели на значительной дальности, используется закрытый центр развертки(Dз> 0), ухудшающий разрешающую способность (см. рис. 13).
Рис. 13. Формирование открытого и закрытого центров развертки
Таким образом, реальная разрешающая способность по угловым координатам определяется следующим образом:
Разрешающая способность по скорости – минимальное различие в скоростях двух целей, находящихся на одной дальности и угловых координатах относительно РЛС, при котором еще возможно раздельное наблюдение этих целей. Разрешающая способность по скорости зависит от ширины спектра сигнала. Чем уже спектр зондирующего сигнала, тем выше разрешающая способность по скорости. В свою очередь ширина спектра сигнала зависит от его длительности. Если для измерения скорости используется одиночный импульсный сигнал, то потенциальная разрешающая способность по скорости определяется следующим образом: для сигнала прямоугольной формы
для сигнала в виде импульса гауссовой формы
Для сигнала в виде пачки из NC когерентных импульсов разрешающая способность по дальности определяется по формулам для одиночного импульса, а разрешающая способность по скорости
где NC – количество импульсов в пачке, Тп – период повторения зондирующих импульсов. Потенциальную разрешающую способность ухудшают выходные устройства, в качестве которых часто используется либо линейка фильтров Допплера, либо следящий фильтр. В обоих случаях разрешающая способность δ (vр)дф, определяемая выходным устройством, определяется шириной полосы пропускания фильтров. Таким образом, реальная разрешающая способность по скорости определяется следующим образом:
Задачи 4.1. Необходимо обеспечить потенциальную разрешающую способность РЛС по дальности не хуже 60 м. Какова должна быть длительность немодулированного зондирующего импульса с прямоугольной и гауссовой огибающей? 4.2. РЛС излучает зондирующие импульсы длительностью 3 мкс. Для обнаружения целей используется индикатор кругового обзора с рабочим диаметром экрана 150 мм. Диаметр электронного пятна на ИКО составляет 0, 4 мм. Можно ли раздельно наблюдать отметки от двух целей, летящих одна за другой в направлении РЛС на расстоянии 600 м друг от друга, если наблюдение ведется на шкалах 15 км и 150 км? 4.3. РЛС с индикатором кругового обзора имеет следующие характеристики: длительность зондирующих импульсов 1 мкс, диаметр пятна на ИКО 0, 5 мм, диаметр экрана ИКО 200 мм. Определить пределы шкалы дальности для обеспечения разрешения целей, летящих в направлении РЛС на расстоянии 400 м. 4.4. Определить разрешающую способность РЛС по дальности, если известно, что передатчик генерирует радиоимпульсы прямоугольной формы, средняя мощность, потребляемая передатчиком от источника питания, составляет 100 Вт. Мощность радиоимпульса 1000 кВт, средний КПД при преобразовании энергии источника питания в энергию высокочастотных колебаний 0, 52. В РЛС применен индикатор кругового обзора с диаметром экрана 300 мм, диаметром электронного пятна 0, 5 мм. Максимальная дальность обнаружения целей составляет 400 км. 4.5. Проектируемая радиолокационная станция должна иметь минимальную дальность действия 160 м и разрешающую способность по дальности не хуже 140 м. Определить необходимую длительность импульса, если время восстановления разрядника, применяемого в качестве антенного переключателя, равно 0, 2 мкс. 4.6. Определить возможно наиболее высокую разрешающую способность РЛС по дальности, если длительность прямоугольных импульсов составляет 2 мкс, диаметр экрана индикатора кругового обзора 300 мм, диаметр электронного пятна 0, 5 мм. В станции применяется ИКО со шкалами 30, 150 и 300 км. 4.7. Определить разрешающую способность радиолокационной станции по дальности, если уровень средней мощности передатчика по отношению к одному мВт составляет 50 дБ, мощность в импульсе 80 кВт, частота повторения зондирующих импульсов 1200 Гц. 4.8. Требуется обеспечить потенциальную разрешающую способность по дальности не хуже 5 м, причем с точки зрения нужной дальности обнаружения длительность сигналов должна быть не менее 10 мкс. Удовлетворяются ли одновременно этим требованиям при применении немодулированных импульсов? Если нет, то сигнал какого вида следует выбрать для удовлетворения этих требований? 4.9. Будут ли две цели наблюдаться на индикаторе кругового обзора раздельно, если они находятся под углом 4, 5° по азимуту относительно друг друга на дальности 50 км. Ширина ДНА РЛС составляет 3°. Дальность, определяемая на индикаторе кругового обзора, составляет 200 км. Какую задержку запуска развертки по дальности необходимо ввести, чтобы обеспечивалось разрешение цели по азимуту. 4.10. На поверхности реки для имитации наличия моста расположили уголковые отражатели с расстоянием между ними 500 м. Разведывательный самолет пролетел сначала под углом 30° по азимуту по отношению к реке, затем поперек нее. Будет ли введен в заблуждение оператор РЛС самолета, если РЛС излучает зондирующие импульсы длительностью 2 мкс? Характеристики ИКО: диаметр экрана индикатора кругового обзора 120 мм, диаметр электронного пятна 0, 3 мм. В станции применяется ИКО со шкалой 100 км. 4.11. С помощью когерентно-импульсной радиолокационной станции, работающей на частоте 300 МГц, ведется наблюдение за самолетом, летящим в облаке дипольных отражателей с радиальной скоростью 1100 км/ч. Определить разницу в допплеровских частотах отраженных сигналов, если отражатели сносятся ветром от станции со скоростью 50 км/ч. 4.12. В устройстве инструментального съема данных РЛС кругового обзора используются эталонные импульсы для счета азимута цели с периодом повторения 0, 1 с. Какова реальная разрешающая способность РЛС по азимуту, если время обзора равно 10 с, а ширина диаграммы направленности 2°? 4.13. Автоматический измеритель азимута цели (см. рис. 14) использует опорную частоту 100 Гц и критерий наличия пачки «3 из 3». Определить составляющую ошибки измерения азимута цели, вызванную применением критерия «3 из 3», если время обзора равно 5 с. Определить разрядность счетчика измерителя азимута. |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1240; Нарушение авторского права страницы
 при обнаружении цели от значений априорных вероятностей наличия
при обнаружении цели от значений априорных вероятностей наличия  от 0 до 1 и отсутствия цели
от 0 до 1 и отсутствия цели  от 1 до 0 с шагом 0, 1, если:
от 1 до 0 с шагом 0, 1, если:  и
и  соответствующие:
соответствующие:  . (20)
. (20) . (21)
. (21) (22)
(22) (23)
(23) (24)
(24) (25)
(25) , (26)
, (26) , (27)
, (27) (28)
(28) (29)
(29)
 , (30)
, (30) (31)
(31)
 (32)
(32) , (33)
, (33) (34)
(34)
 , (35)
, (35) . (36)
. (36) . (37)
. (37) (38)
(38) , (39)
, (39) , (40)
, (40) , (54)
, (54) . (55)
. (55) . (56)
. (56) . (57)
. (57) (58)
(58) – девиация частоты,
– девиация частоты,  – коэффициент сжатия по длительности.
– коэффициент сжатия по длительности. , (59)
, (59) ; dп – диаметр рисующего пятна; dэкр –диаметр экрана; Dмах – максимальная дальность действия РЛС.
; dп – диаметр рисующего пятна; dэкр –диаметр экрана; Dмах – максимальная дальность действия РЛС. , где Q – качество фокусировки электронно-лучевой трубки.
, где Q – качество фокусировки электронно-лучевой трубки. . (60)
. (60) , [град] (63)
, [град] (63) . (64)
. (64) , (65)
, (65) . (66)
. (66) , (67)
, (67) . (68)
. (68)