|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинематическая зависимость между длиной хода точки подвеса штанг и размерами балансирного привода
Рассмотрим, от каких факторов зависит длина хода балансирного привода и каким способами рационально осуществить длинноходовой привод. Из треугольников В1СВ2 и В1ОВ2 см. рис. 7.63 после несложных преобразований получим:
С другой стороны
При симметричном цикле работы станка, т.е. когда 0=0, получим
При несимметричном цикле угол θ может быть определен по формулам (7.67) или (7.68), а также, если известна величина Ко по формуле (7.64), после чего из формулы (7.71), зная отношения длин звеньев, определяем
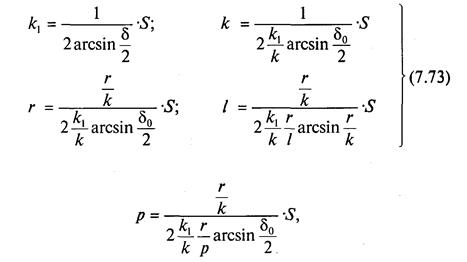
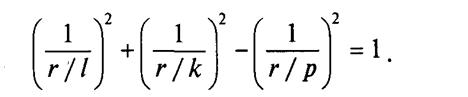
где sin(δ 0/2) определяется по формуле (7.70). Из описанных формул видно, что длины звеньев r, l, к, к1 и р преобразующего механизма станка-качалки прямо пропорциональны длине хода точки подвеса штанг S и зависят от отношений длин звеньев r/l, r/к и k1/k Из рис. 7.64 легко определить следующую зависимость между отношениями длин звеньев станка, имеющего симметричную схему:
Тогда для симметричного цикла откачки формулы (7.73) предcтавим в виде:
Эти формулы свидетельствуют о том, что при симметричном цикле откачки длины звеньев четырехзвенного механизма станка-качалки являются функцией длины хода S итрех кинематических отношений r/l, r/к и k1/k, причем с увеличением значений этих отношений длины звеньев r, l, к, к1 и р уменьшаются. Сказанное выше будет иметь прямое отношение и к габаритам Преобразующего механизма, т.е. к его длине L и высоте его Н см. рис. 7.63. В случае симметричной схемы из рассмотрения рис. 7.60 имеем:
Из формул (7.62) и (7.63) получим:
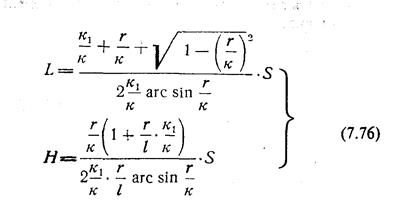
Из этих формул также видно, что кинематические габариты (длина L и высота Н) симметричного преобразующего механизма балансирного привода: прямо пропорциональны длине хода S точки подвеса штанги являются функцией кинематических отношений причем длина L механизма зависит от r/к и к1/к, а высота H— от r/к, r/l и k1/k. Вообще, с увеличением значений этих отношений габариты преобразующего механизма, а следовательно, и вес привода уменьшаются.
Очевидно, при несимметричной схеме
центр вращения кривошипа находится справа (если скважина находится в левой стороне) от линии B1B2, т.е. длина станка будет несколько больше, чем длина при симметричной схеме, а при
центp вращения кривошипа находится между скважиной и линией B1B2 Следовательно, в этом случае длина L преобразующе-m механизма будет меньше, чем длина при симметричной схеме. Таблица 7.18
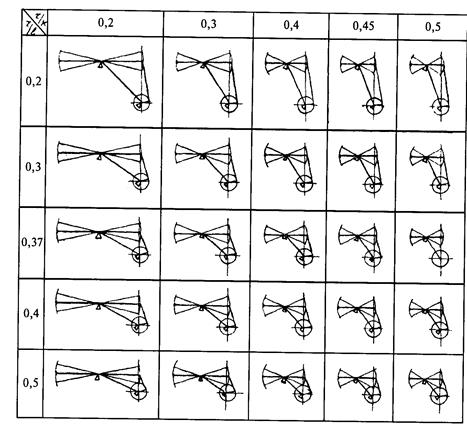
Одним из основных экономических показателей современных машин и механизмов является компактность и легкость их конструкции. Поэтому увеличение длины хода точки подвеса штанг за счет увеличения габаритных размеров, а следовательно и веса, нерационально. Рациональным в данном случае способом увеличения длины хода, на первый взгляд, является увеличение значений кинематических отношений r/l, r/к и k1/k. Для наглядного представления о сказанном рассмотрим самый простой вариант кинематической схемы, когда плечи балансира равны, и длина хода точки подвеса штанг равна единице, т.е. k1 = k и S = 1 В этом случае длины звеньев и габариты станка будут зависить только от кинематических отношений r/l, r/к.
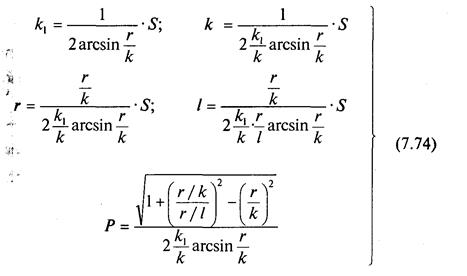
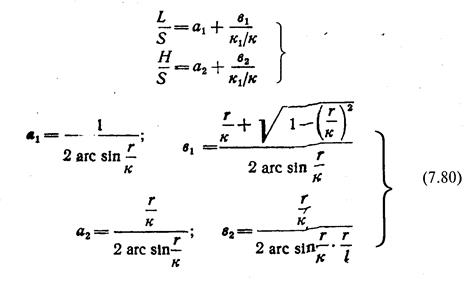
Рис. 7.65. Зависимость размеров преобразующего механизма обычных станков-качалок от значения кинематических отношений r/1 и r/к По формулам (7.76) для этого случая подсчитаны значения звеньев к1 = к, r и l для значений r/l и r/k от 0, 1 до 0, 5, занесенные в табл. 7.18, а также по этим значениям длин звеньев достроены кинематические схемы механизма, показанные на рис. 7.65. Из рассмотрения табл. 7.18 и рис. 7.65 наглядно видно резкое влияние значении кинематических отношении r/l и r/k на величины длин звеньев и на габариты преобразующего механизма станка- качалки. Теперь рассмотрим, как влияет отношение плеч балансира k1/k на габариты и длины звеньев преобразующего механизма к. Как видно из формул (7.74) и (7.75), длины звеньев к, r, lи р четырехзвенного механизма обратно пропорциональны отношению k1/k, а габаритные размеры для симметричной схемы имеют следующие зависимости: где
В табл. 7.19 показаны значения длин звеньев r, l, к и к1 подсчитанные по формулам (7.75) для значений к1 /к = 1, 0—2, 0 через 0, 1 при S = 1, r/l = 0, 4 и r/к - 0, 5. Таблица 7.19
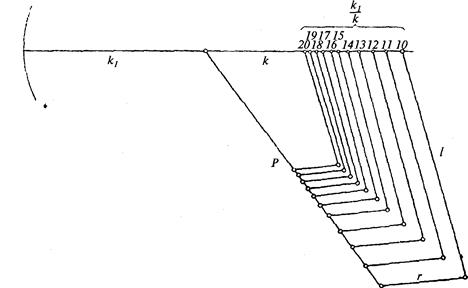
Рис. 7.66. Зависимость размеров преобразующего механизма от отношений плеч балансира k1/k
По данным табл. 7.19 построены кинематические схемы преобразующего механизма при S=1, рис. 7.66. Из рис. 7.66 видно, что увеличение k1/k приводит к уменьшению продольного, и, особенно, высотного габарита преобразующего механизма.
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 578; Нарушение авторского права страницы