
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Сравнительная оценка локальных и глобальных вычислительных сетей.⇐ ПредыдущаяСтр 24 из 24
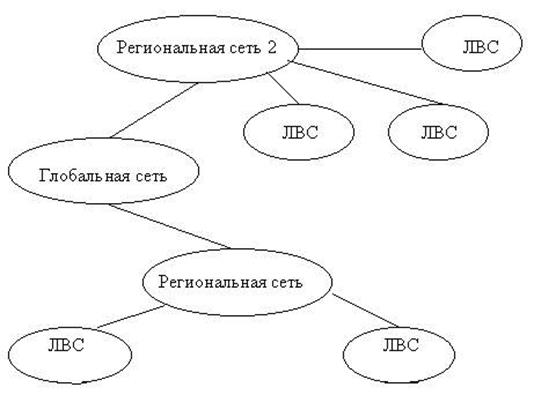
Классификация вычислительных сетей В зависимости от территориального расположения абонентских систем вычислительные сети можно разделить на три основных класса: глобальные сети (WAN - Wide Area Network); региональные сети (MAN - Metropolitan Area Network); локальные сети (LAN - Local Area Network). Глобальная вычислительная сеть объединяет абонентов, расположенных в различных странах, на различных континентах. Взаимодействие между абонентами такой сети может осуществляться на базе телефонных линий связи, радиосвязи и систем спутниковой связи. Глобальные вычислительные сети позволяют решить проблему объединения информационных ресурсов всего человечества и организации доступа к этим ресурсам. Региональная вычислительная сеть связывает абонентов, расположенных на значительном расстоянии друг от друга. Она может включать абонентов внутри большого города, экономического региона, отдельной страны. Обычно расстояние абонентами региональной вычислительной сети составляет десятки - сотни километров. Локальная вычислительная сеть объединяет абонентов, расположенных в пределах небольшой территории. В настоящее время не существует четких ограничений на территориальный разброс абонентов локальной вычислительной сети. Обычно такая сеть привязана к конкретному месту. К классу локальных вычислительных сетей относятся сети отдельных предприятий, фирм, банков, офисов и т. д. Протяженность такой сети можно ограничить пределами 2 - 2, 5 км. Объединение глобальных, региональных и локальных вычислительных сетей позволяет создавать многосетевые иерархии. Они обеспечивают мощные, экономически целесообразные средства обработки огромных информационных массивов и доступ к неограниченным информационным ресурсам. На рис. 6.4 приведена одна из возможных иерархий вычислительных сетей. Локальные вычислительные сети могут входить как компоненты в состав региональной сети, региональные сети - объединяться в составе глобальной сети и, наконец, глобальные сети могут также образовывать сложные структуры.
Рис. 6.4. Иерархия компьютерных сетей Пример 6.4. Компьютерная сеть Internet является наиболее популярной глобальной сетью. В ее состав входит множество свободно соединенных сетей. Внутри каждой сети. Входящей в Internet, существуют конкретная структура связи и определенная дисциплина управления. Внутри Internet структура и методы соединений между различными сетями для конкретного пользователя не имеют никакого значения. Персональные компьютеры, ставшие в настоящее время непременным элементом любой системы управления, привели к буму в области создания локальных вычислительных сетей. Это, в свою очередь, вызвало необходимость в разработке новых информационных технологий. Практика применения персональных компьютеров в различных отраслях науки, техники и производства показала, что наибольшую эффективность от внедрения вычислительной техники обеспечивают не отдельные автономные ПК, а локальные вычислительные сети. Электродвигательные ИМ. Электродвигательные ИМ ( ЭИМ ) получили наибольшее распространение в системах промышленной и сельскохозяйственной автоматики. Чаще всего в ЭИМ малой мощности (до 1000 Вт) применяются двухфазные асинхронные двигатели или двигатели постоянного тока, а в более мощных – трехфазные с короткозамкнутым или фазным ротором. Для уменьшения выбега двигателя и улучшения качества регулирования используется электрическое торможение. Конструктивно ЭИМ обычно выполняют с вращательным движением выходного вала и реже – с поступательным перемещением выходного штока. В зависимости от типа регулирующего органа различают однооборотные, многооборотные, шаговые и постоянно вращающиеся ЭИМ. Однооборотные - с углом поворота выходного вала до 360° применяют обычно в приводе таких регулирующих органов, как заслонки, краны, шибера и т.п. Многооборотные - используют для перемещения регулирующих органов в форме запорных вентилей, дросселей и задвижек. Выходной вал у них может совершать большое число оборотов и одновременно поступательно перемещать регулирующие органы. Шаговые – применяют для преобразования импульсных сигналов управления в фиксированный угол поворота, т.е. на каждый импульс механизм делает строго заданный угловой шаг. У постоянно вращающихся - крутящий момент от вала электродвигателя к регулирующему органу передается обычно через электромагнитную муфту. Направление и скорость вращения выходного вала муфты регулируют, изменяя ток возбуждения муфты. Основными техническими требованиями, предъявляемыми к ЭИМ, являются: - статическая устойчивость и линейность механических характеристик во всем диапазоне изменения управления; - линейная зависимость угловой скорости вращения ротора от величины управляющего сигнала во всем рабочем диапазоне; - высокое быстродействие по отношению к динамическим параметрам объекта управления; - большой пусковой момент; - малая мощность управления при значительной механической мощности на валу электродвигателя; - отсутствие самохода, т.е. малый остаточный вращающий момент при отсутствии сигнала управления; - высокая надежность; - малые габариты, размеры и масса; - высокие эксплуатационные свойства (КПД, ресурс работы). 3. Практическая задача: Рассчитать основные характеристики идеального интегрирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
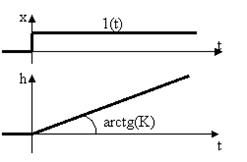
k - коэффициентом передачи звена. постоянная времени (в сек.) Переходная функция: h(t)=K·t Ее значение линейно нарастает во времени (теоретически до бесконечности). Скорость нарастания переходной функции равна коэффициенту К.
КЧХ:
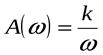
АЧХ:
АЧХ представляет собой гиперболу, которая при
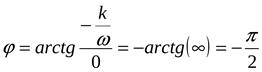
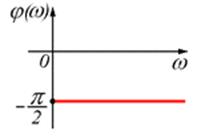
ФЧХ:
показывает, что сдвиг фаз, создаваемый звеном, на всех частотах одинаков и равен -900.
Примеры интегрирующих звеньев
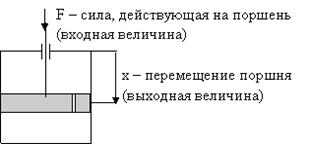
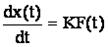
Гидравлический демпфер
Скорость движения поршня будет пропорциональна силе:
Замечание. Такое математическое описание допустимо, только если пренебречь механической инерцией поршня, силами трения между поршнем и стенками и рядом других факторов.
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 439; Нарушение авторского права страницы
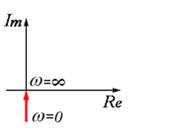
 стремится к бесконечности.
стремится к бесконечности.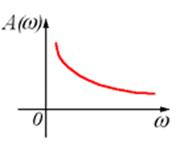
 , следовательно, перемещение поршня будет пропорционально интегралу силы:
, следовательно, перемещение поршня будет пропорционально интегралу силы: 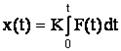 . Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.
. Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.