|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Система команд микроконтроллера
Микроконтроллер оснащен системой команд, предназначенной для решения задач циклового и программно-логического управления дискретными производственными процессами, и обеспечивающей простоту и высокую производительность программирования. Исходная информация для составления программ может быть представлена циклограммой работы оборудования, блок-схемой алгоритма управления или в виде булевых функций. Система команд микроконтроллера реализована исполнительной программой, хранящейся в ПЗУ модуля памяти. Команды микроконтроллера можно разделить по функциональному назначению на следующие группы: 1) команды ввода-вывода; 2) команды управления программой; 3) команды управления счетчиками; 4) команды контроля и редактирования программы; 5) команды тестового контроля функциональных блоков. Система команд микроконтроллера приведена в табл. 3. Слово команды делится на два поля длиной по восемь разрядов – поле кода операции и поле операнда. Формат команды представлен на рис.9.
Рис. 9
“N0”, “N1”, “N2”, “N3” кодируются символами шестнадцатиричной сис-темы счисления 0, …..9, А, В, С, D, E, F. Совокупность команд образует управляющую программу, которая записывается и хранится в модуле ЭНЗУ. Объем модуля ЭНЗУ позволяет записать 256 команд УП (512 байт) и составляют одну зону памяти. Каждая зона памяти, в свою очередь, делится на две страницы, объемом по 128 команд (256 байт). Номер зоны является базовым адресом (БА) для отсчета команд УП, записанной в этой зоне, и хранится в служебном регистре БА, организованном исполнительной программой в ОЗУ. Помимо «БА» в ОЗУ организованы следующие регистры: 1) «СК» – счетчик команд микроконтроллера, содержимое которого определяет адрес команды в пределах зоны памяти; 2) «БУ» – бит условия, значение которого устанавливается в зависимости от результата выполнения ряда операций; анализ бита условия исполняется для управления ходом исполнения УП; 3) «УС» – регистр и указатель стека, определяющий адреса ячеек ОЗУ (стековая память), в которых запоминаются значения «БА» и «СК» при обращении к подпрограмме, откуда они выбираются при выполнении команды «ВОЗВРАТ»; Таблица 3
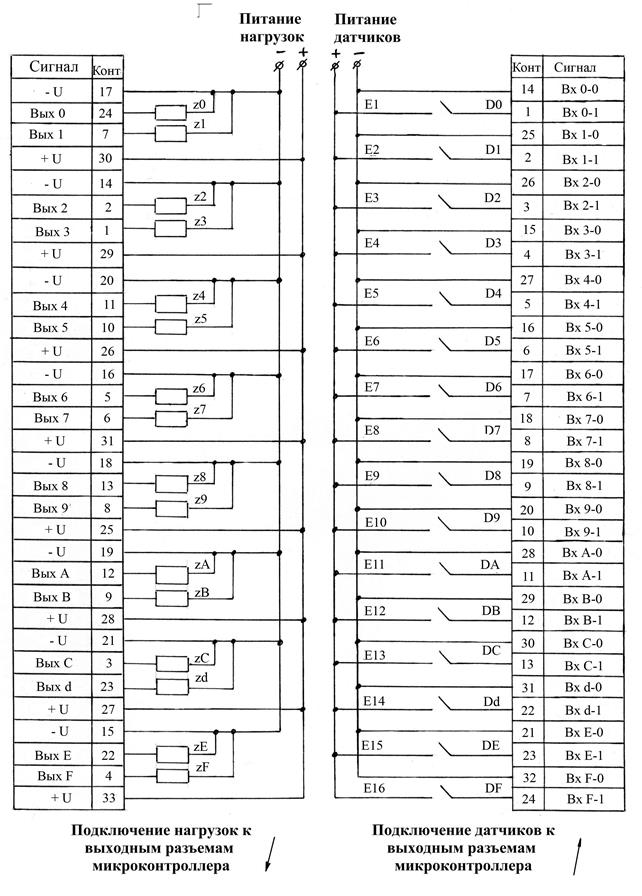
4) шестнадцать счетчиков, содержание которых может изменяться от 0 до F. При необходимости счетчик может использоваться как однобитовая память. Изменение состояния служебных регистров приведено в описаниях соответствующих команд. Команды ввода-вывода обеспечивают ввод информации от датчиков состояния оборудования и выдачу управляющих воздействий на исполнительные устройства. В командах вывода информации адрес выхода, определяемый значением поля операнда, кодируется двумя шестнадцатиричными цифрами N1, N0 (см. табл.3), первое из которых может принимать значение от 0 до 2 и определяет один из трех модулей вывода дискретных сигналов, которые могут быть установлены в микроконтроллере. Второе шестнадцатиричное число N0 определяет один из шестнадцати конкретных выходов 0, ….., F в пределах выбранного модуля. Состояние каждого выхода отображается соответствующим индикатором, выведенным на переднюю панель модулей вывода дискретных сигналов. На рис. 10 приведена схема подключения нагрузок z0…zF и датчиков D0….DF состояния технологического оборудования к контактам разъемов микроконтроллера. В командах опроса датчиков состояния технологического оборудования адреса датчиков определяются аналогично адресам выходов. Состояние каждого входа отображается на передней панели модулей ввода дискретных сигналов. Примеры связи команд с управляемыми по ним внешним нагрузкам приведены в табл. 4. Примеры связи команд опроса датчиков с их адресами и подключением к входным разъемам микроконтроллера приведены в таблице 5
Таблица 4
Таблица 5
Датчики установленные на роботе выдают информацию о положении механизмов робота: 1) датчик D0 – нижнее положение механизма подъема, 2) датчик D1 – верхнее положение механизма подъема, 3) датчик D2 –механизм поворота повернут по часовой стрелке, 4) датчик D3 - механизм поворота повернут против часовой стрелки, 5) датчик D4 - механизм горизонтальных перемещений задвинут, 6) датчик D5 – механизм горизонтальных перемещений выдвинут.
Рис. 10
При использовании «БУ» необходимо иметь в виду, что «БУ» принимает исходное состояние, соответствующее логической «1» в следующих случаях: · при включении питания микроконтроллера; · при нажатии кнопки СБР; · после команд условных переходов. Кроме того, можно установить «БУ» в определенное состояние, используя команды «УСТ БУ ВХ» и «УСТ БУ ВХ». Выполнение команды «БУП» не изменяет состояние «БУ». Используя «БУ», можно реализовать алгоритм управляющей программы, заданной булевыми функциями (управляющими). Выдержка времени Команда «Выдержка времени» предназначена для реализации алгоритмов задач циклового управления, построенного по временному принципу. В поле операнда команды задается величина выдержки времени, кратная 0, 1 с. Например, минимальная выдержка, равная 0, 1 с, задается командой 0701, выдержка, равная 1 с, задается командой 070А, а максимальное значение, равное 25, 5 с, – командой 07FF. Если необходимо получить временную задержку больше 25, 5 с, то в УП необходимо последовательно включить две или несколько команд выдержки времени, обеспечивающих суммарную задержку, равную требуемой. |
Последнее изменение этой страницы: 2017-05-05; Просмотров: 2292; Нарушение авторского права страницы

 . Вход «0» будет опрашиваться до тех пор, пока напряжение на контактах 1, 14 не станет близким к нулю
. Вход «0» будет опрашиваться до тех пор, пока напряжение на контактах 1, 14 не станет близким к нулю