|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Виды схем управления технологическим оборудованием, основные
Правила построения схем. Примеры схем
При разработке ГПС в зависимости от этапа проектирования и глубины проработки проекта могут приниматься различные схемы управления. 1 – мнемонические схемы (упрощенные), связанные непосредственно с характером движения детали по участку, выделенному в под ГПС. На них изображается расположение оборудование, а также на это расположение наносится схема потоков заготовок и деталей. 2 – функциональные схемы – это технический документ, отображающий сам процесс, происходящий в данной производственной системе. В этом случае все оборудование указывается упрощенно, но обозначаются пульты управления этим оборудованием. Пульты обозначают прямоугольниками, внутри которых есть дополнительные обозначения, соответствующие применяемым техническим средствам.
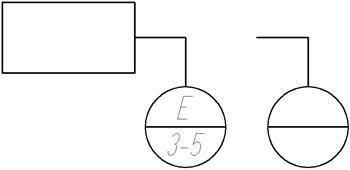
Рисунок 45 – Измерительный прибор на пульте управления
Здесь показан измерительный прибор, входящий в пульт управления, предназначенный для измерения некоторой электрической величины с указанием позиций в общей спецификации. Условные обозначения, применяемые в схемах: Е – измерение электрической величины. D – плотность материала. F – расход вещества. G – размер. R – радиоактивность. V – вязкость материалов. M – масса материала. S – скорость перемещения. P – давление. W – влажность материала. В некоторых случаях может дополнительно обозначаться функциональное назначение прибора, тогда условное обозначение приводят в следующем виде.
Рисунок 46 – Обозначение измерительного прибора
А – приборы сигнализации. С – приборы регулирования. J – приборы для снятия показаний. R – приборы регистрации, в т.ч. самописцы. S – приборы для подключения какого-либо другого оборудования.
3. Кроме того, встречаются принципиальные электрические схемы, в которых используются обозначения по ГОСТ2.702-75, ГОСТ2.710-81, ГОСТ2.701-84. Разрабатываются эти схемы по принципиальным схемам управления оборудованием ГПС, которые разрабатывает технолог, курирующий проект.
4. Гидравлические и пневматические схемы управления. Правила их составления регламентированы ГОСТ2.704-76 или СТ СЭВ1981-79. Условные обозначения по ГОСТ2.781-68, ГОСТ2.784-70, ГОСТ2.785-70. Схемы разрабатываются специалистами соответствующего профиля, но в основе лежат принципиальные схемы управления, составленные технологом.
5. Принципиальные схемы управления. Разрабатываются как основа для дальнейшей разработки проекта и сочетает в себе элементы пневмо- и гидросхем, содержат кинематику основных исполнительных узлов, содержат взаимосвязь между элементами в виде управляющих сигналов. При этом разработчик должен указать последовательность команд, указывается содержание команды, рекомендуется указывать обозначение элемента по данной схеме, к которому идет сигнал. Все элементы на таких схемах обозначаются в виде условных обозначений и буквенных обозначений, нумеруются в последовательности выполнения различных движений данного оборудования. В ГПС используется достаточно большое количество оборудования, то такие схемы получаются сложными, и рекомендуется разделять их на зоны. Это делается пунктирной линией с указанием вида оборудования. Допускается обрывать линии на схеме, показывающие управляющие сигналы с обязательным обозначением этих сигналов на каждом элементе. ГПС часто содержат в качестве оборудования промышленный робот, то следует иметь в виду, что для их кинематики применяются специальные обозначения. (Внимание! Далее табл. и схемы роботов дублируют материал по ПР). Таблица – Условные обозначения в кинематических схемах ПР
Примеры структурно-кинематических схем промышленных роботов
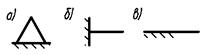
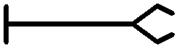
Рисунок 47 – Исполнительный механизм робота, использующий плоскую прямоугольную систему координат
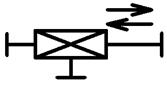
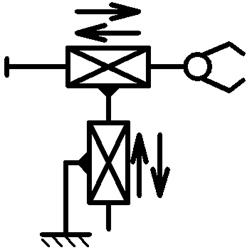
Рисунок 48 – Робот с пространственной прямоугольной системой координат
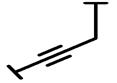
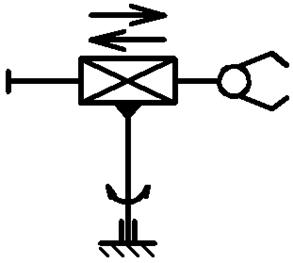
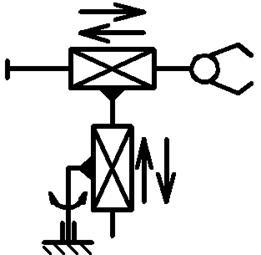
Рисунок 49 – Роботы с пространственной цилиндрической системой координат: слева – с двумя степенями подвижности; справа – с тремя степенями
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 936; Нарушение авторского права страницы