|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Предотвращение столкновения судовСтр 1 из 11Следующая ⇒
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» Куценко Д.Г.
Предотвращение столкновения судов
Конспект лекций Для курсантов специальности 26.05.05 «Судовождение» очной и заочной форм обучения Керчь, 2016
Содержание Введение 4 Раздел 1. Радиолокационное наблюдение и прокладка 6 Тема 1. Оценка ситуации сближения судов. 6 Тема 2. Правила плавания при любых условиях видимости. 11 Тема 3. Правила плавания при нормальной видимости 12 Тема 4. Правила плавания при ограниченной видимости 18 Тема 5. Истинная и относительная радиолокационная прокладка. 20 Тема 6. Виды ЛОДов. Критерии опасности целей 24 Тема 7. Закономерности относительного движения 26 Тема 8. Расчет маневра расхождения с одной целью 28 Тема 9. Расчет маневра расхождения с группой судов. 30 Тема 10. Частные задачи расхождения 33 Тема 11. Требования к использованию РЛС. 38 Раздел 2. Использование средств автоматической радиолокационной прокладки 35 Раздел 2. Использование средств автоматической радиолокационной прокладки 41 Тема 12. Возможности, назначение и функции САРП. 41 Тема 13. Реализация функций САРП в различных РЛС 43 Тема 14. Реализация САРП в РЛС “Океан-с” и Бридж-мастер. 48 Тема 15 Ограничения РЛС САРП 56 Тема 16.Навигационное использование САРП. 58 Список использованной (рекомендуемой) литературы 63 Введение Цель изучения дисциплины «Предотвращение столкновений судов» - получить знания и умения, необходимые для исполнения обязанностей вахтенного помощника капитана в части выяснения ситуации сближения судов в море и предупреждения их столкновения. Достижение этой цели осуществляется путем глубокого усвоения МППСС-72, методов выяснения ситуации сближения судов, вычисления параметров сближения, признаков опасного и безопасного сближения, выполнения упражнений на электронных тренажерах. Рабочая программа составлена на основании ФГОС ВО, компетенций ПДМНВ 78 с поправками и рабочего учебного плана с учетом требований ООП.примерный тематический план подготовки Примерный тематический план Раздел 1. Радиолокационное наблюдение и прокладка
Раздел 2. Использование средств автоматической радиолокационной прокладки
Раздел 1 Радиолокационное наблюдение и прокладка Правило 5. Наблюдение Каждое судно должно вести постоянное наблюдение всегда, т.е. независимо от состояния видимости и района плавания. На морском флоте существует термин "впередсмотрящий" – это человек (один или несколько, включая вахтенного помощника), который уделяет все свое внимание наблюдению и не принимает на себя каких-либо обязанностей, которые снижают эффективность надлежащего наблюдения в ЛЮБЫХ условиях видимости. Наблюдение должно обеспечивать не только своевременное обнаружение судов, но и определение характера их действия. Надлежащее наблюдение означает использование всех имеющихся для этого возможностей, включая визуальное и слуховое наблюдение, а также наблюдение с использованием технических средств. В условиях ограниченной видимости, кроме визуального наблюдения, должно осуществляться слуховое и радиолокационное наблюдение. При радиолокационном наблюдении с помощью РЛС, САРП и АИС должны учитываться их технические возможности и ограничения (теневые секторы, мертвая зона, дальность обнаружения и т.п.). Также должно осуществляться постоянное прослушивание эфира с помощью УКВ радиостанции на 16 канале. Вопросы для самоконтроля: 1. В каком разделе МППСС содержаться правила плавания в любых условиях видимости? 2. Как выглядит схема действий раздела МППСС правил плавания при любых условиях видимости 3. Что отображено в правиле №5? 4. В каких случаях должно вестись наблюдение за окружающей навигационной обстановкой? 5. Какие виды дополнительного наблюдения должны вестись в условиях ограниченной видимости? 6. Что означает термин «впередсмотрящий»? 7. На каком канале УКВ должна?
Рекомендуемая литература [2,3,7,8].
Правило 12 . Парусные суда
Парусное судно означает любое судно под парусом, под действием которого оно и перемещается. Данное правило устанавливает общий порядок расхождения парусных судов. Здесь определено, которое из двух встречающихся судов должно уступить дорогу в зависимости от галса и положения их по отношению к ветру или друг к другу. Галс – курс судна относительно ветра. Если ветер дует влевый борт – судно идет левым галсом, если в правый – то правым галсом. Правило 12 тесным образом связано с правилами 8 и 16 в части выполнения действий и маневра. Парусное судно, которому уступают дорогу, должно выполнять требования правила 17 (а), (b). На парусное судно также распространяется действие правила 13 при совершении им обгона. При этом оно должно держаться в стороне от пути обгоняемого судна, независимо от галса, которым оно следует. Парусное судно, идущее левым галсом, должно уступить дорогу парусному судну, идущему правым галсом (Правый всегда прав). Парусное судно, находящееся на ветру должно уступить дорогу парусному судну под ветром (на одном галсе). Если парусное судно, следующее левым галсом, видит другое парусное судно с наветренной стороны и не может точно определить его галс, оно должно уступить ему дорогу. Обязанности судов с механическим двигателем по отношению к парусному судну определяются правилом 18. Исключение составляют плавание в узкостях и по системам разделения движения, а также ситуации обгона. В этих случаях парусное судно не должно затруднять плавание судна с механическим двигателем. При выполнении правила 12 необходимо учитывать следующее:
Правило 13. Обгон
Правило13 применяется, когда суда находятся на виду друг у друга. Определение "ОБГОН" дается в п. (b) этого правила и звучит так: “Судно считается обгоняющим другое судно, когда оно подходит к нему с направления более 22,5° позади траверза последнего...”. Правило 13 касается обгона на свободной акватории, так как обгон в узкости определяется правилами 9 и 34.
Рисунок. 3. Ситуации обгона судна: суда Б и С обгоняющие, судно Д – пересекающее курс судна А
В общем случае обгоняющее судно должно: держаться в стороне от пути обгоняемого судна; анализировать складывающуюся обстановку в районе плавания и не мешать маневрированию обгоняемого судна; избегать чрезмерного сближения с обгоняемым судном.при обгоне увеличивается, когда: суда идут параллельными или почти параллельными курсами; траверзное расстояние между судами мало; размеры судов сильно различаются; суда следуют по мелководью или в узкости; скорости судов значительны. Если у судна у судна возникают сомнения, является ли оно обгоняющим, то это судно должно считаться обгоняющим и должно уступать дорогу посредством уменьшения хода, изменения курса под корму другого судна, изменения курса на параллельный. Законченным обгон считается в том случае, когда обгоняемое судно «будет окончательно пройдено и оставлено позади». Этот момент наступает только тогда, когда оба судна смогут, не опасаясь столкновения, предпринимать нужные им маневры.
Правило 14. Ситуация сближения судов, идущих друг на друга
Правило 14 применяется для расхождения двух судов с механическим двигателем в условиях, когда одно наблюдается визуально с другого. При сближении на противоположных или почти противоположных курсах нет судна привилегированного или обязанного уступить дорогу. Здесь действует каждое самостоятельно, применяя дополнительно сигналы маневроуказания. Следует учитывать, что относительная скорость сближения судов в этих условиях весьма высока и может составлять 40-50 узлов. При таких скоростях относительного сближения при обнаружении топовых огней на пределе их дальности видимости сближение может произойти уже через 8-12 мин. За это небольшое время необходимо оценить обстановку, выбрать и предпринять маневр для расхождения. В правиле 14 применен термин “ПОЧТИ “ прямо по курсу. Когда же может возникнуть подобная ситуация? Например, при наблюдении за таким судном, у которого бортовой огонь виден то один, то другой попеременно вследствие рыскания. Или же когда разность во встречных курсах не превышает 5–6 град. Возможно, судоводитель и сомневается в том, существует ли такая ситуация. Во всех случаях необходимо СЧИТАТЬ СЕБЯ БЛИЖЕ К ОПАСНОСТИ и действовать заблаговременно и решительно, четко показывая свой бортовой огонь или изменение ракурса. Наиболее сложное положение при расхождении по правилу 14 возникает при различной оценке ситуации, когда одно судно наблюдает другое на остром курсовом угле справа.
Рисунок. 4. Схема построения правила 14
Анализ аварийности показывает, что много столкновений произошло в результате того, что одно судно для увеличения расстояния расхождения изменило курс влево, а другое, действуя по правилам, повернуло вправо. Расхождение судов в ситуации правила 14 имеет следующие особенности: · относительная скорость сближения наибольшая и равна сумме скоростей обоих судов. Это требует оперативности в оценке ситуации, заблаговременных и решительных действий; · оба судна имеют одинаковые обязанности: каждое должно изменить свой курс ВПРАВО, с тем чтобы каждое судно прошло у другого по левому борту; · внимательно наблюдать за поведением другого судна с учетом того, что оно может не заметить вашего маневра и сигнала поворота, неправильно их истолковать или иметь какое-либо препятствие для выполнения своего правого отворота. Нередко встречные суда изменяют свой курс влево; · при плавании в стесненных водах с целью достижения безопасного расхождения необходимо привести свою скорость к безопасной до максимально возможного расхождения в существующих условиях; · использовать радиолокатор, в том числе и радиолокационную прокладку, для принятия более обоснованного решения на уклонение и возможности последующего контроля маневра.
Истинная прокладка Такая прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем. Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние D1, пускают секундомер, замечают судовое время Т1, курс своего судна Кн и отсчет лага ОЛ1. По пеленгу и расстоянию наносят местоположение эхо-сигнала А1 относительно своего местоположения, предварительно выбрав желаемый масштаб (Рисунок. 5). Через определенный промежуток времени (для расчетов удобен интервал в 3 или 6 мин) наблюдения повторяют (П2, D2, Т2, ОЛ2) и наносят местоположения своего судна 02 и наблюдаемого судна А2. Проведя через точки А2, и А2, прямую линию, получим линию истинного перемещения цели Кц.
Рисунок. 5. Истинная прокладка По расстоянию между точками А 1и А2 и по времени Т1 и Т2 можно определить скорость цели Vц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна Тпер и Dпер. Для определения расстояния кратчайшего сближения Dкр и времени до него tкр из точки А2откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями А2F=O1O2. Отрезок O1С, проведенный перпендикулярно к линии, проходящей через точки A1, и F, будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки O1 и A4) можно найти параллельным перемещением отрезка O1С в положение O4A4. Время сближения на кратчайшее расстояние
Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако, чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (A1, А2, А3) на одной прямой и равенство расстояний А1А2=А2А3 свидетельствуют как об отсутствии промахов в наблюдениях, так и о неизменности элементов движения цели в период от T1 до Т3. К достоинствам способа истинной прокладки следует отнести его наглядность. Недостатком является относительная трудоемкость графических построений, необходимых для определения основных обстоятельств встречи: дистанции кратчайшего сближения и времени до него. Относительная прокладка Эта прокладка получила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения. Из точки О, принимаемой за место своего судна, прокладывают наблюденные пеленги П1 и П2 и по ним расстояния D1 и D2 (Рисунок. 6), Через полученные точки А1, и А2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения Dкр. Время сближения на кратчайшее расстояние
Рисунок. 6 относительная прокладка При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку перес Течения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. Dкр и tкр, а затем уже определять элементы движения цели. Истинное перемещение цели является суммой двух перемещений - относительного Учитывая коммутативность суммы векторов Построение векторного треугольника (см. Рисунок. 6), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке. Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром). В дальнейшем мы будем в основном пользоваться прямым построением, так как оно более удобно при решении задач расхождения. Длина вектора движения судна-наблюдателя должна быть равна в выбранном масштабе плаванию своего судна за время между наблюдениями, принятыми для построения векторного треугольника. Длина полученного вектора движения цели соответствует плаванию цели за время между наблюдениями. Вопросы для самоконтроля: 1. Что такое истинная прокладка? Каковы ее достоинства и недостатки? 2. Что такое относительная прокладка? Каковы ее достоинства и недостатки? 3. Что такое векторный треугольник скоростей? 4. Когда выполняется обратное построение векторного треугольника скоростей?. 5. Какие параметры сближения необходимо определить при построении истинной и относительной прокладки? 6. Как интенсивно должны быть сняты пеленг и дистанция на судно? Рекомендуемая литература [2,3,7,8]
Вопросы для самоконтроля: 1. Каковы закономерности относительного движения? 2. Как измениться направление ЛОДа цели с правого борта , при повороте вправо? 3. Каким образом изменяться ЛОДы целей при уменьшении хода судна? 4. Что произойдет с ЛОДом цели-саттелита , при повороте вправо? 5. Эффективен ли маневр в сторону цели, находящейся на траверзных курсовых углах? 6. В каких случаях ЛОД цели параллелен курсу собственного судна? Рекомендуемая литература [2,3,7,8]
Вопросы для самоконтроля: 1. Какие параметры нужны для построения вектора нашей скорости? 2. Точки 1,2,3 отмечаются по пеленгам дистанциям. Как часто нужно снимать пеленга и дистанции? 3. Что такое ЛОД? 4. Какая функция СООК? Дайте определение СООК. 5. Каким образом наноситься вектор нового курса при повороте вправо? 6. Где будет располагаться точка 1’ при уменьшении скорости ? 7. Что такое дистанция отхода? Рекомендуемая литература [2,3,7, 8,13,15,22]
Вопросы для самоконтроля: 1. Какие параметры нужны для построения вектора нашей скорости? 2. . Как часто нужно снимать пеленга и дистанции для расчета МБР с группой судов? 3. Что такое МБР? 4. Какая конвенция регламентирует выбор маневра расхождения с группой судов? 5. Каким образом наноситься вектор нового курса при повороте вправо? 6. Где будет располагаться точка 1’ при изменении курса ? 7. Что такое метод хорд? 8. Как определяется время расхождения с группой судов? Рекомендуемая литература [2,3,7, 8,13,15,22] МБР с судном-сателлитом Признаком судна – сателлита является постоянство П и Д на цель. Т.е. т.1,2,3 совпадают в одной точке.
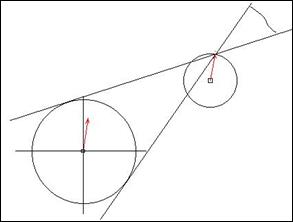
Рисунок.14. судно сателлит на носовых КУ. Рассмотрим судно – сателлит на носовых КУ на дистанции более заданной, т.е. Д >Дзад. В соответствии с методикой расчета МБР при т.1 строим вектор Vн и проводим окружность. Наносим т.4, которая будет совпадать с т.1. Из т.4 проводим касательные к окружности Дзад и строим СООК. Видно, что конец вектора Vн не находится в СООК и при любом нашем повороте конец Vн не попадает в СООК. ВЫВОД: При расхождении с судном – сателлитом, находящемся на носовых КУ, можно маневрировать в любую сторону. 2. Рассмотрим судно – сателлит на траверзных КУ на Д>Дзад.
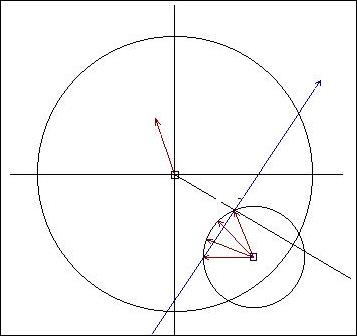
Рисунок.15. судно-сателлит позади траверза. В соответствии с методикой проводим касательные к Дзад и строим СООК. Видно, что одна из границ СООК отсекает сегмент у окружности Vн, который показывает, что при повороте нашего судна в сторону судна – сателлита, конец Vн попадает в сегмент, что приведет к сокращению дистанции на величину менее Дзад. Правило 19(d) МППСС-72 не рекомендует поворачивать в сторону цели, находящейся на траверзных КУ. ВЫВОД: Для расхождения с судном – сателлитом, находящемся на траверзных КУ возможны маневры: а) поворот от судна – сателлита, б) уменьшение своей скорости. 3. Рассмотрим судно-сателлит на кормовых КУ на Д>Дзад. В соответствии с методикой расчета МБР проводим касательные к окружности Дзад и строим СООК. Одна из границ СООК отсекает еще больший сегмент у окружности Vн, который говорит, что при повороте нашего судна в сторону судна-сателлита произойдет сокращение дистанции на величину менее Дзад. Правило 19(d) МППСС-72 не рекомендует поворачивать в сторону цели, находящейся на кормовых КУ. ВЫВОД: Для расхождения с судном-сателлитом, находящемся на кормовых КУ, возможны маневры: а) поворот от судна-сателлита; б) уменьшение нашей скорости, при условии, что линия ИКц не заходит в опасную зону. При выходе из узкости или при других обстоятельствах складывается ситуация, когда судно-сателлит находится внутри опасной зоны, то есть Д<Дзад. 4. Рассмотрим судно-сателлит на носовых КУ на Д<Дзад.
Рисунок.16. судно-сателлит в Дзад впереди траверза. МБР необходимо рассчитать так, чтобы в процессе расхождения имеющаяся дистанция не сокращалась. Для этого проводим ИП на цель. В т.1 проводим линию, перпендикулярную ИП, которая будет являться ОЛОДом и линией СО одновременно (так как т.3 и т.4 совпадают). Мы можем назначить любой Кнн ,но необходимо дать соответствующую ему Vнн, ,так чтобы вектор Vнн не пересекал линию СО. Тем самым будет обеспечено расхождение с судном-сателитом без сокращения имеемой дистанции. Рассмотрим судно-сателлит на кормовых КУ на Д<Дзад. Для расчета МБР проводим ИП на цель. В т.1 проводим линию, перпендикулярную ИП, которая будет являться ОЛОДом и линией СО одновременно. Если назначить Кнн и дать соответствующую ему Vнн, или назначить Vнн и лечь на соответствующий ей Кнн так, чтобы вектор Vнн пересекал или хотя бы коснулся линии СО, то тем самым будет обеспечено расхождение с судном-сателлитом без сокращения имеемой дистанции.
Рисунок.16. судно-сателлит в Дзад позади траверза. Суда – сателлиты, находящиеся на траверзных и кормовых КУ являются потенциально опасными судами. Вопросы для самоконтроля: 1. Как выглядит ЛОД догоняющей цели? 2. Как выглядит ЛОД судна не имеющего хода относительно воды? 3. Что такое судно сателлит? 4. Является ли судно сателлит опасной целью если находиться впереди траверза? 5. Каким образом рассчитывается маневр расхождения с судном-сателлитом если таковое находиться в Дзад? 6. Приемлемо уменьшение хода для расхождения с сателлитом? Если да то в каких случаях? 7. Можно ли использовать метод хорд для расхождения с сателитом? 8. Как определяется время расхождения с сателитом? Рекомендуемая литература [2,3,7, 8,13,15,22]. Тема 11. Требования к использованию РЛС. При работе с САРП судоводитель освобожден от механически рутинных операций: съема и обработки радиолокационных пеленгов и дистанций. Это позволяет сосредоточить внимание на наиболее ответственных функциях - непрерывном квалифицированном наблюдении, оценки навигационной ситуации, выборе и выполнении оптимального маневра для обеспечения безопасного расхождения и плавания судна по заданному маршруту. При этом САРП рассматривается лишь в качестве датчика навигационной информации, необходимой для успешного расхождения с целями, но не как система предупреждения столкновений, чем подчеркивается ведущая роль судоводителя в обеспечении безопасности мореплавания. Принципиально новая для судовождения система радиолокатор-компьютер-человек создает определенные проблемы при эксплуатации САРП и связанные с этим опасности неграмотного или неквалифицированного использования САРП ИМО особо отмечает, что САРП с низкими технико-эксплуатационными характеРисуноктиками или обслуживаемые недостаточно обученным персоналом могут нанести ущерб безопасности мореплавания. Ассамблея ИМО в своей Резолюции А.422 (XI) рекомендовала правительствам стран-членов ИМО обеспечить надлежащее обучение капитанов, старших помощников и помощников капитана, несущих ходовую вахту, правильному использованию САРП с тем, чтобы судоводители понимали основные принципы применения этих средств, их возможности, ограничения и погрешности. Каждый капитан, старший помощник и помощник капитана, несущий ходовую вахту на судне, на котором установлено САРП, должен пройти соответствующий курс обучения (включая тренажерное) по использованию САРП. Минимальные требования по обучению методам использования САРП сформулированные в Резолюции ИМО А.482(12) от 19 ноября 1981 г. и рассматриваются как дополнение к главе - 11 Международной Конвенции о подготовке и дипломировании моряков и несении вахты 1978 г. Согласно Резолюции А.482(12) капитаны, старшие помощники и помощники капитана, несущие ходовую вахту, должны · уметь оценить риск передоверия данным САРП; · знать основные типы САРП и характеристики их индикаторов; требования ИМО к технико-эксплуатационным характеристикам САРП; факторы, влияющие на работу САРП и его точность; возможности САРП и его ограничения; задержки в обработке радиолокационной информации; · знать и уметь продемонстрировать: · правила включения и настройки индикаторов САРП; · правила использования предупредительной сигнализации, ее достоинства и недостатки; · правила проверки функционирования САРП; принципы использования информации в режимах истинного и относительного движения, включая идентификацию опасных эхо-сигналов. Применение запретных зон в режиме автозахвата, относительный курс и скорость целей, время и дистанцию кратчайшего сближения, курс и скорость целей, определение изменения курса и скорости цели и ограничения, свойственные этой информации, влияние изменения элементов движения собственного судна и проигрывание маневра; · методику ручного и автоматического захвата целей и связанных с ними истинного и относительного движения; · типовое графическое представление информации о цели и ее опасной зоне; · использование информации о следах сопровождаемых целей; · применение Международных правил предупреждения столкновений судов в море. Только четкое и ясное представление об эффективном совместном использовании возможностей человека и техники является фундаментом для достижения основной цели обучения - овладения профессиональными знаниями и навыками, обеспечивающими безопасное судовождение в любых условиях плавания. По выражению английских специалистов, хорошего судоводителя САРП делает еще лучше, плохого - еще хуже. САРП не решает задачу предупреждения столкновений судов, а лишь обеспечивает судоводителя необходимой для этого информацией, которую необходимо грамотно анализировать и эффективно использовать. Поэтому и обучение судоводителей методам работы с САРП не должно сводиться к изучению только технической стороны вопроса (управлению прибором). Особое внимание необходимо уделять самому слабому участку в обработке информации - анализу ситуации судоводителем с использованием данных САРП, грамотному обоснованию принимаемого решения с учетом международных и отечественных документов по безопасности мореплавания (в частности, МППСС-72) и требований хорошей морской практики. Успешное освоение САРП как технического устройства должно обеспечивать способность судоводителя квалифицированно осуществлять выбор режимов наблюдения, использование графической (в том числе векторной) и буквенно-цифровой информации, надлежащее использование оперативной и предупредительной аппаратурной сигнализации. Захват и сопровождение опасных целей, очистку индикатора САРП от ненужной информации, снятие и использование данных по сопровождаемым целям для принятия решения о действии, выполнение маневра для избежания чрезмерного сближения с другими судами с последующим контролем за его результатом. Необходимо также четко представлять опасность передоверия принятия решения режиму автоматического захвата и сопровождения целей и не полагаться полностью на показания САРП при выдаче предупредительной сигнализации. Вопросы для самоконтроля: 1. Что является причиной создания САРП? 2. Является ли САРП системой предупреждения столкновений судов? 3. Перечислите минимальны требования по безопасному использованию САРП. 4. Решает ли САРП задачу предотвращения столкновения судов 5. Что означает передоверие САРП? Рекомендуемая литература [3,6,7,8,9,17].
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» Куценко Д.Г.
Предотвращение столкновения судов
Конспект лекций Для курсантов специальности 26.05.05 «Судовождение» очной и заочной форм обучения Керчь, 2016
Содержание Введение 4 Раздел 1. Радиолокационное наблюдение и прокладка 6 Тема 1. Оценка ситуации сближения судов. 6 Тема 2. Правила плавания при любых условиях видимости. 11 Тема 3. Правила плавания при нормальной видимости 12 Тема 4. Правила плавания при ограниченной видимости 18 Тема 5. Истинная и относительная радиолокационная прокладка. 20 Тема 6. Виды ЛОДов. Критерии опасности целей 24 Тема 7. Закономерности относительного движения 26 Тема 8. Расчет маневра расхождения с одной целью 28 Тема 9. Расчет маневра расхождения с группой судов. 30 Тема 10. Частные задачи расхождения 33 Тема 11. Требования к использованию РЛС. 38 Раздел 2. Использование средств автоматической радиолокационной прокладки 35 Раздел 2. Использование средств автоматической радиолокационной прокладки 41 Тема 12. Возможности, назначение и функции САРП. 41 Тема 13. Реализация функций САРП в различных РЛС 43 Тема 14. Реализация САРП в РЛС “Океан-с” и Бридж-мастер. 48 Тема 15 Ограничения РЛС САРП 56 Тема 16.Навигационное использование САРП. 58 Список использованной (рекомендуемой) литературы 63 Введение Цель изучения дисциплины «Предотвращение столкновений судов» - получить знания и умения, необходимые для исполнения обязанностей вахтенного помощника капитана в части выяснения ситуации сближения судов в море и предупреждения их столкновения. Достижение этой цели осуществляется путем глубокого усвоения МППСС-72, методов выяснения ситуации сближения судов, вычисления параметров сближения, признаков опасного и безопасного сближения, выполнения упражнений на электронных тренажерах. Рабочая программа составлена на основании ФГОС ВО, компетенций ПДМНВ 78 с поправками и рабочего учебного плана с учетом требований ООП.примерный тематический план подготовки Примерный тематический план |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-20; Просмотров: 1221; Нарушение авторского права страницы







 до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
 и судна-наблюдателя
и судна-наблюдателя  или
или 
 , можно находить
, можно находить  двумя способами.
двумя способами.