
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кулачковые механизмы. Основные сведения.
Плоские кулачковые механизмы являются трехзвенными механизмами и состоят из стоики, кулачка (входное звено) и толкателя {выходное звено). Кулачок и толкатель образуют со стойкой низшие кинематические пары, а между собой высшую кинематическую пару.
Полный цикл работы таких кулачковых механизмов осуществляется за один оборот кулачка. Перемещение толкателя из нижнего крайнего положения в крайнее верхнее положение называется ходом толкателя Н (мм), или Угол, на который поворачивается кулачок при перемещении толкателя из крайнего нижнего положения в крайнее верхнее положение, называется углом удаления ( Угол поворота кулачка, при котором толкатель остается в крайнем верхнем положении, называется углом дальнего выстоя ( Угол, на который поворачивается кулачок при перемещении толкателя из крайнего верхнего положения в крайнее нижнее положение, называется углом возвращения ( Угол поворота кулачка, при котором толкатель находится в крайнем нижнем положении, называется углом ближнего выстоя ( Острый угол между векторами абсолютной и относительной скорости (по отношении к кулачку) точки контакта толкателя с кулачком называется углом передачи движения Проектирование профиля кулачковой шайбы, обеспечивающей требуемый закон движения толкателя, составляет задачу синтеза кулачковых механизмов. Если для построения профиля кулачка имеются все необходимые исходные данные, в том числе и минимальный радиус кулачка, то такой синтез называется кинематическим. При проектировании кулачковых механизмов помимо обеспечения требуемого закона движения толкателя приходится решать задачи, связанные с получением минимальных габаритов кулачковых механизмов при одновременном обеспечении нормальных динамических условий их работы (отсутствие заклинивания, допустимый износ и т.д.). Поэтому при проектировании часто задаются некоторыми дополнительными динамическими условиями, например минимальным углом передачи движения, а минимальный радиус кулачка определяют исходя из этих условий. Такое решение задачи синтеза называется динамическим синтезом кулачковых механизмов.
Исходные данные для проектирования. Целью работы является построение профиля кулачка в соответствии с исходными данными. Исходными данными при профилировании являются: 1. Схема кулачкового механизма, которая может быть представлена одной из схем, изображенных на рис.1. 2. Фазовые углы кулачка: 3. Ход толкателя: H(мм) для схем ( рис. 1, а, б); 4. Минимальный угол передачи движения 5. Число оборотов кулачка n , об/мин. 6. Направление вращения кулачка. 7. Эксцентриситет для схемы (см. рис. 1,а)
8. Длина коромысла l для схемы (см. рис. 1 в) 9. Диаграмма движения толкателя Содержание и порядок выполнения расчетов и построений Построение диаграммы движения выходного звена кулачкового механизма ( толкателя или коромысла) Построение диаграмм проводится на основании заданной диаграммы аналога ускорения толкателя Для построения заданной диаграммы
Задаются максимальной ординатой диаграммы на угле удаления или угле возвращения, удобнее задаваться ординатой на том угле, который больше. Величину ординаты следует принимать в пределах
Разбивается угол удаления и угол возвращения на одинаковое, четное число интервалов интегрирования, обычно 8-12, и строится исходная диаграмма. При построении необходимо учитывать следующее (см. рис. 2): а) для законов, А и В точки максимума и минимума ускорений должны соответствовать концам интервалов интегрирования, т.е. число интервалов по оси б) для закона Д наклонные участкам графика должно соответствовать целое число интервалов интегрирования; в) для законов А и Б построение графика аналога ускорения проводится методами, известными из курса технического черчения. Построение диаграммы аналога скорости Для этого: а) строятся ординаты ab , cd , …., соответствующие серединам интервалов интегрирования 01,12,..., и откладываются на оси ординат отрезки оb' = ab ,оd' = cd и т.д. (см. рис. 3а);
б) на продолжении оси j выбирается полюс в) на рис. 3б из точки 0 проводится отрезок Оb'' в интервале 0-1 параллельно лучу Полученная ломаная (в пределе - кривая) является графиком аналога скорости. Проводя аналогичное интегрирование графика
3.2 Вычисление масштабов диаграмм
Все три диаграммы построены в неопределенных масштабах. Их масштабы определяются по заданным значениям хода толкателя или угла поворота коромысла
где Масштабы диаграммы аналога скорости толкателя и угловой скорости коромысла:
где Масштабы диаграмм аналога ускорений:
Определяется угловая скорость кулачка
где
3.3.Определение минимального радиуса кулачка. Минимальный радиус кулачка определяется графическим путем. Рассмотрим определение |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 408; Нарушение авторского права страницы
 Наиболее распространенными являются кулачковые механизмы, у которых кулачок совершает вращательное движение, а толкатель - либо возвратно-поступательное (рис. I, а, б), либо колебательное движение (рис. Iв). Если центр вращения кулачка лежит на продолжении прямолинейной траектории толкателя, то кулачковый механизм называется центральным (см. рис. I б), если же центр вращения кулачка не лежит на этой прямой, то кулачковый механизм называется внецентренным, а величина e называется эксцентриситетом (см. рис. Iа).
Наиболее распространенными являются кулачковые механизмы, у которых кулачок совершает вращательное движение, а толкатель - либо возвратно-поступательное (рис. I, а, б), либо колебательное движение (рис. Iв). Если центр вращения кулачка лежит на продолжении прямолинейной траектории толкателя, то кулачковый механизм называется центральным (см. рис. I б), если же центр вращения кулачка не лежит на этой прямой, то кулачковый механизм называется внецентренным, а величина e называется эксцентриситетом (см. рис. Iа). (град).
(град). ).
). ).
). ).
). ). Сумма
). Сумма  ,
,  и
и  называется рабочим углом кулачка,
называется рабочим углом кулачка, 
 (см. рис.1). Величина
(см. рис.1). Величина перемещает толкатель, преодолевая силы полезного и вредного сопротивления, а составляющая
перемещает толкатель, преодолевая силы полезного и вредного сопротивления, а составляющая  увеличивает трение в кинематической паре, образованной толкателем со стойкой.
увеличивает трение в кинематической паре, образованной толкателем со стойкой. уменьшается, а сила
уменьшается, а сила  увеличивается, следовательно, при некотором предельном значении g сила
увеличивается, следовательно, при некотором предельном значении g сила  - минимальное значение угла передачи движения, при котором еще не наблюдается заклинивание.
- минимальное значение угла передачи движения, при котором еще не наблюдается заклинивание. -угол дальнего выстоя/(стояния);
-угол дальнего выстоя/(стояния); - угол возвращения.
- угол возвращения. (град) для схемы (рис.1,в).
(град) для схемы (рис.1,в).

 или
или  (рис.2)
(рис.2) или 1[град/мм]. В принятом масштабе по оси углов откладываются отрезки, соответствующие углам удаления, дальнего стояния и возвращения (рис. З, а)
или 1[град/мм]. В принятом масштабе по оси углов откладываются отрезки, соответствующие углам удаления, дальнего стояния и возвращения (рис. З, а) ,
,  ,
,  .
. , причем больше значение h следует брать, если
, причем больше значение h следует брать, если  и
и  равны или близки по величине, и меньшее, если они сильно разнятся. Величина ординаты на втором угле определяется на основании соотношения:
равны или близки по величине, и меньшее, если они сильно разнятся. Величина ординаты на втором угле определяется на основании соотношения:
 должно быть кратным четырем;
должно быть кратным четырем; или
или  проводится графическим интегрированием диаграммы аналога ускорения.
проводится графическим интегрированием диаграммы аналога ускорения.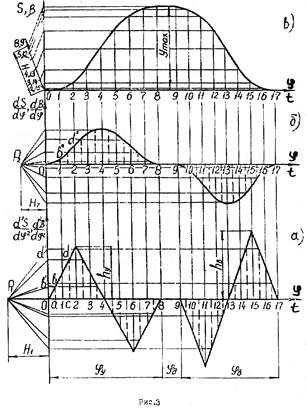
 и соединяется с точками b', d', ..., полюсное расстояние выбирается из условия, чтобы максимальная ордината графика
и соединяется с точками b', d', ..., полюсное расстояние выбирается из условия, чтобы максимальная ордината графика  =40-60 мм);
=40-60 мм); d' и т.д.
d' и т.д. или
или  , получаем диаграмму перемещений толкателя
, получаем диаграмму перемещений толкателя  или
или  (см. рис.3в).
(см. рис.3в). . Масштаб диаграммы определяется по выражениям:
. Масштаб диаграммы определяется по выражениям: ,
, 

 - максимальная ордината диаграммы перемещений толкателя или углов поворота коромысла (см. рис. 3в).
- максимальная ордината диаграммы перемещений толкателя или углов поворота коромысла (см. рис. 3в). ;
; ;
; - полюсное расстояние на рис. 3б.
- полюсное расстояние на рис. 3б.
 .
. , а затем вычисляются масштабы времени
, а затем вычисляются масштабы времени  , скорости толкателя
, скорости толкателя  , ускорения толкателя
, ускорения толкателя  или масштабы угловой скорости
или масштабы угловой скорости  и углового ускорения
и углового ускорения  коромысла, а также масштабы перемещений
коромысла, а также масштабы перемещений  , скорости
, скорости  и ускорения
и ускорения  центра ролика коромысла по формулам:
центра ролика коромысла по формулам: ;
; ;
; ;
; ;
; ;
; ;
; ;
; ,
, - длина коромысла, м.
- длина коромысла, м. для всех трех типов кулачковых механизмов.
для всех трех типов кулачковых механизмов.