|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Матричная реализация комбинационных схем⇐ ПредыдущаяСтр 16 из 16
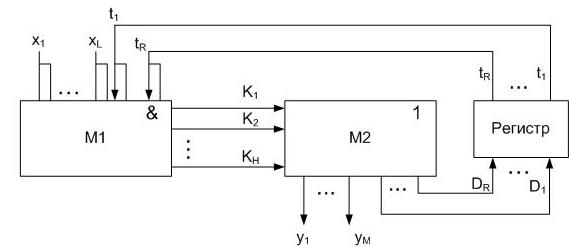
Любая ДНФ системы булевых функций y1, y2, ..., yn от переменных x1, x2, ..., xL может быть реализована двухуровневой схемой, на первом уровне которой формируются все различные термы X1, X2, ..., XH, а на втором дизъюнкции этих термов y1, y2, ..., yn. В логических БИС комбинационные схемы часто выполняются в матричной форме, Рис. 1.
Рисунок 8 Структура матричной реализации комбинационных схем На рисунке М1 и М2 представляют собою систему ортогональных шин, в местах пересечения которых при изготовлении схемы могут быть установлены полупроводниковые элементы - транзисторы или диоды. Каждая горизонтальная шина матрицы М1 - это терм Хh, а каждая вертикальная шина матрицы М2 - это дизъюнкция yn термов, полученных в матрице М1. Иначе, матрица М1 формирует H различных конъюнкций, от которых в матрице М2 реализуется N различных дизъюнкций. При построении матриц М1 и М2 используются полупроводниковые биполярные и МОП -элементы.[1]
Рисунок 9 Матричная реализация системы логических функций на биполярных элементах Рассмотрим матричную реализацию комбинационных схем на примере системы булевых функций, представленных в ДНФ: y1 = `x1x2 Ú x1`x2`x4 Ú x1x3x4; y2 = `x1x2 Ú `x1`x3x4 Ú `x1`x2x3 Ú x2`x4; y3 = x1`x2`x4 Ú x1`x3 Ú `x1`x2x3. Реализация этой системы функций на ПЛМ показана на Рис.2. Точками на схеме обозначены места межсоединений вертикальных и горизонтальных шин, необходимые для реализации термов, входящих в систему функций. Эти межсоединения образуются в матричной структуре при программировании матрицы. Сложность матричной реализации комбинационной схемы принято оценивать суммарной информационной емкостью (площадью) матриц, которая для структуры на Рис.2 равна S(M) = S(M1) + S(M2) = 2LH + HN [бит] Для сокращения информационной емкости при реализации системы функций необходимо представить ее в ДНФ с минимальным числом различных термов. Матрицы М1 и М2 при реализации системы принято изображать в виде таблицы, столбцы которой отмечаются переменными x1, ..., xl и функциями y1, ..., yn. Каждому терму ПЛМ ставится в соответствие строка таблицы. На пересечении столбца xl и строки, соответствующей какому-либо терму, записывается 1 или 0, если данная переменная входит в соответствующий терм без инверсии или с инверсией, или как *, если данная переменная не входит в данный терм. В правой части таблицы на каждой вертикали указываются все термы, которые входят в ДНФ, означающую выход yg. Программирование матриц для системы функций, реализованной ПЛМ, изображенной на Рис.2, приведено в Табл.3. Таблица 34 Пример программирования ПЛМ
Матричная реализация МПА Проиллюстрируем матричную реализацию МПА на примере синтеза автомата, заданного Табл.1. МПА может быть реализован тривиальным образом в виде структуры, изображенной на Рис. 3. Здесь матрица МЕ формирует термы E1, ..., EH, соответствующие строкам структурной таблицы МПА, а матрица MyD реализует микрооперации и функции возбуждения элементов памяти как дизъюнкции от термов из набора E1, ..., EH. Схема тривиальной матричной реализации МПА, заданного Табл.1, приведена на Рис.3. Здесь предполагается, что для построения матриц использованы биполярные элементы. Поэтому реализация осуществляется в базисе {&, Ú, ` }.
Достоинства такой матричной реализации очевидны. Прежде всего - это простота проектирования автомата, которое по существу сводится к отображению структурной таблицы на матрицы МЕ и MyD. Отметим, что различные варианты кодирования состояний не усложняют процесса проектирования и схему автомата, которую, как и ранее оценивают информационной емкостью (площадью) ее матриц. В этом случае S(M) = S(ME = S(MyD) = (2L + 2R)H + (N + R) H [бит].
Недостаток тривиальной реализации заключается в значительной избыточности матриц ME и MyD. Замена входных переменных и соответствующее кодирование состояний способствуют оптимизации схемы. Структурная схема МПА с заменой переменных представлена на Рис.10. Здесь матрицы Mz и Мр реализуют новые переменные, матрица MF - термы ДНФ, определяющих новые переменные, а матрица MyD - та же, что и на Рис.9.
Заметим, что в матрице Mz каждой входной переменной соответствует только одна вертикаль, так как в выражения для новых входных переменных эти переменные входят без инверсии. Из сравнения Рис. 3 и 4 видно, что матрица ME заменена матрицами MZ, MP, MF. Выигрыш от замены входных переменных будет в том случае, если информационная емкость матрицы МЕ превышает суммарную информационную емкость матриц MZ, MP и MF. В реальных МПА средней сложности с параметрами: L=S=50, H=200, R=6, G=5 сложность S(ME)=14400 бит, что более чем в два раза превышает S(MZ)+S(MP)+S(MF)=5810 бит. Поэтому важно так заменить переменные и закодировать состояния автомата, чтобы минимизировать площадь матриц Мz и Mp. Последнее будет выполнено в случае минимального числа S термов в выражениях для новых входных переменных.
[1] МОП - металл -окисел-полупроводник. Действие МОП - элементов в отличие от биполярных основано на переносе только основных носителей заряда. [1] Савельев А.Я. Прикладная теория цифровых автоматов. М.: «Высшая школа», 1987 [2] Самофалов К.Г. и др. Прикладная теория цифровых автоматов. Киев: «Вища школа», 1987. – 375 с. [3] Глушков В.М. Синтез цифровых автоматов. М.: Физматгиз, 1962..
|
Последнее изменение этой страницы: 2019-03-29; Просмотров: 326; Нарушение авторского права страницы