
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Бийский технологический институт (филиал). Р.Г. ГарееваСтр 1 из 22Следующая ⇒
Бийский технологический институт (филиал) государственного образовательного учреждения высшего профессионального образования «Алтайский государственный технический университет им. И.И. Ползунова»
Р.Г. Гареева
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Курс лекций
Бийск Издательство Алтайского государственного технического университета им. И.И. Ползунова 2010 УДК 681.51(075.8) ББК 32.965 Г 20
Основы теории управления: курс лекций / Р.Г. Гареева; Алт. гос. техн. ун-т, БТИ. – Бийск: Изд-во Алт. гос. техн. ун-та, 2010. – 85 с.
В курсе лекций приводятся классификация систем управления, примеры составления дифференциальных уравнений простейших объектов регулирования, правила преобразования структурных схем, различные виды динамических характеристик линейных систем, критерии устойчивости и качества переходных процессов, типовые законы регулирования, особенности математического описания цифровых систем управления. Курс лекций предназначен для студентов специальности 230201 «Информационные системы и технологии» дневной формы обучения по дисциплине «Основы теории управления».
УДК 681.51(075.8) ББК 32.965
Рассмотрено и одобрено на заседании научно-методического совета Бийского технологического института. Протокол № 7 от 01.07.2010 г.
© Гареева Р.Г., 2010 © БТИ АлтГТУ, 2010
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
Совершенствование технологий и повышение производительности труда во всех отраслях народного хозяйства относятся к важнейшим задачам технического прогресса нашего общества. Решение этих задач возможно лишь при широком внедрении систем автоматического управления как отдельными объектами, так и производством в целом. Поэтому изучение основ теории автоматического управления (ТАУ) и регулирования (ТАР) предусматривается при подготовке выпускников практически всех инженерных специальностей.
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В настоящее время в науке и технике широко используется понятие управления. Под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели на основе заданного алгоритма управления. Управление каким-либо объектом – это процесс воздействия на него с целью обеспечения требуемого течения процесса в объекте или требуемого изменения его состояния. Одной из важнейших проблем управления является получение наилучшего процесса, соответствующего назначению данного объекта. В зависимости от поставленной задачи наилучший процесс характеризуется наибольшей эффективностью, безопасностью, точностью, надежностью, быстродействием или, как правило, сочетанием этих факторов. Понятие управления связано с такими исходными понятиями, как объект управления, воздействие и цель. Объект управления (ОУ) может принадлежать как к неживой природе, в частности, быть техническим устройством (самолет, станок и т.п.), так и к живой природе (коллектив людей, животное и т.п.). Управляемой величиной (y) называют величину, характеризующую состояние объекта управления (его скорость, давление, температуру), значение которой требуется поддерживать постоянным или изменять надлежащим образом. Целенаправленное изменение режима работы объекта управления достигается воздействием на специальные каналы (входы) объекта. Эти воздействия называются управляющими. Управляющие воздействия на объект управления определяются характером поступающей информации, то есть сведениями о предполагаемом или прошедшем состоянии системы. Это в первую очередь характеристики и параметры объекта, а также данные о значениях координат, определяющих ход управляемого процесса. Определение величины и характера необходимого воздействия на объект, а также его осуществление могут выполняться человеком (самолетом управляет пилот) или специальным техническим устройством (самолетом управляет автопилот), называемым устройством управления (УУ). Системой управления (СУ) называют совокупность объекта управления и управляющего устройства, процесс взаимодействия которых приводит к выполнению поставленной цели управления. Если устройство управления функционирует без участия человека, то систему называют системой автоматического управления (САУ). Процесс управления подразумевает наличие умения и способности создать целенаправленное воздействие. Эти свойства определяют алгоритм управления. Под алгоритмом управления понимают совокупность правил, методов и способов, позволяющих синтезировать целенаправленное воздействие, если известно действительное состояние объекта управления. Блок-схему системы управления можно представить в следующем виде (рисунок 1.1).
x – входной сигнал; y – выходной сигнал; u – управляющее воздействие Рисунок 1.1 – Блок-схема системы управления Устройство управления на основе цели управления и в соответствии с алгоритмом управления вырабатывает управляющие воздействия, которые должны удовлетворять выбранному критерию управления и ограничениям, задаваемым моделью объекта управления. Качество процесса управления характеризуется тем, насколько процесс управления близок к желаемому. Количественно оно определяется критериями качества, которые выбираются в соответствии с целью управления. К ним могут относиться величина максимального отклонения управляемой величины от заданного значения, колебательность переходного процесса, его длительность и т.п. Точность управления характеризуется погрешностью системы в установившихся режимах, например, величиной установившегося отклонения управляемой величины от заданного значения по окончании переходного процесса. Управления
Функциональная схема системы автоматического управления представлена на рисунке 1.2.
ЗУ – задающее устройство; УУ – устройство управления; ОУ – объект управления; ОС – элемент обратной связи Рисунок 1.2 – Функциональная схема САУ
Командный сигнал, изображенный на схеме, отражает изменение цели управления (например, увеличение давления или уменьшение температуры объекта управления). Для того чтобы техническая система могла воспринять командный сигнал, используется задающее устройство (обычно типа делителя напряжения, обеспечивающего на выходе стандартное напряжение). Выходной сигнал с задающего устройства Сигнал Устройство управления, как правило, содержит: чувствительное устройство для измерения переменных Устройство управления на основе значения ошибки Основной задачей синтеза САУ является определение управляющего устройства в виде его математического описания для заданных объектов управления, требований к точности и качеству управления и условий работы, включая характеристики внешних воздействий, требования к надежности, весу, габаритам, потребляемой мощности и т.д.
Литература
1. Шишмарев, В.Ю. Основы автоматического управления: учебное пособие / В.Ю. Шишмарев. – М.: Академия, 2008. – 348 с. 2. Софиева, Ю.Н. Основы линейной теории автоматического регулирования / Ю.Н. Софиева, В.Я. Бадеников, А.Э. Софиев. – Иркутск: Изд-во Иркут. ун-та, 1994. – 124 с. 3. Бесекерский, В.А. Теория систем автоматического регулирования / В.А. Бесекерский, Е.П. Попов. – М.: Наука, 1975. – 767 с. 4. Юревич, Е.И. Теория автоматического управления / Е.И. Юревич. – Л.: Энергия, 1975. – 416 с. 5. Иванов, В.А. Математические основы теории автоматического регулирования / В.А. Иванов, Б.К. Чемоданов, В.С. Медведев. – М.: Высшая школа, 1971. – 807 с. АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Особенностью современных технологических процессов любой природы является их большая сложность. Эта сложность проявляется в значительном числе параметров, определяющих течение процесса, в большом числе внутренних связей между параметрами и их взаимном влиянии. Для исследования свойств таких сложных систем широко применяют различного рода модели.
Управления
Динамические свойства линейных звеньев и систем автоматического управления могут быть описаны уравнениями или графическими характеристиками. В теории автоматического управления применяют два типа таких характеристик – частотные и временные (переходные). Эти характеристики могут быть сняты экспериментально или построены по уравнению звена. Имеется и обратная возможность – по экспериментально полученным характеристикам составить уравнение звена. Кроме того, с помощью этих характеристик можно определить реакцию звена на любое возмущение произвольного вида. Таким образом, частотные и временные характеристики однозначно связаны с уравнением звена и наряду с ним являются исчерпывающим описанием динамических свойств звена. К частотным характеристикам относятся передаточная функция системы и непосредственно частотная характеристика, к временным – переходная функция и импульсная характеристика.
Передаточная функция
Рассмотрим отдельное звено САУ, на вход которого поступает воздействие
Рисунок 2.5 – Динамическое звено САУ
Если для сигналов
то передаточная функция звена определяется как отношение изображения по Лапласу выходного сигнала к изображению по Лапласу входного сигнала при нулевых начальных условиях:
Зная передаточную функцию звена
Далее, переходя от изображения Для решения аналогичной задачи при ненулевых начальных условиях сначала требуется получить выражение для изображения выходного сигнала путем преобразования по Лапласу дифференциального уравнения звена с учетом влияния начальных условий, а затем осуществить переход к оригиналу. Таким образом, передаточная функция полностью характеризует динамические свойства системы и поэтому является ее важнейшей характеристикой. Зная передаточную функцию системы, можно определить процесс изменения выходной координаты системы при наличии входного воздействия и заданных начальных условий. Преобразование структурных схем САУ. Отдельные звенья САУ могут быть соединены друг с другом в различных комбинациях. Зная передаточные функции звеньев, образующих сложную систему c заданной структурной схемой, можно получить передаточную функцию системы в целом, учитывая следующие правила преобразования. Частотная характеристика
Частотные характеристики описывают установившиеся вынужденные колебания на выходе звена, вызванные гармоническим воздействием на его входе. Если на вход звена с передаточной функцией При фиксированной амплитуде входных колебаний амплитуда и фаза установившихся колебаний на выходе звена зависят от частоты колебаний. Эти зависимости определяются свойствами частотной характеристики звена, которая может быть легко получена по виду передаточной функции, полагая в ней аргумент
Частотную характеристику можно представить в показательном виде:
где Амплитудная частотная характеристика звена на частоте входного сигнала представляет собой отношение амплитуды установившегося выходного гармонического сигнала к амплитуде входного гармонического сигнала. Фазовая частотная характеристика звена на частоте входного сигнала показывает, на сколько выходной сигнал сдвинут по фазе (углу) относительно входного сигнала. Для частотной характеристики используется также и алгебраическая форма записи:
где Согласно выражениям (2.13), (2.14) справедлива следующая связь между приведенными характеристиками:
Годографом частотной характеристики называют траекторию, которую описывает конец радиус-вектора, длина которого равна АЧХ системы, а угол поворота – ФЧХ (рисунок 2.9).
Рисунок 2.9 – Годограф инерционного звена
Координатами годографа в комплексной плоскости являются функции
Переходная функция
Переходной функцией системы Единичная ступенчатая функция
Рисунок 2.10 – Единичная ступенчатая функция
Функция включения может быть описана равенством
Таким образом, для переходной функции справедливо следующее соотношение:
Выведем выражение, связывающее изображение переходной функции
и изображение единичной ступенчатой функции
получим:
Используя выражение (2.17) и осуществив переход к оригиналу, можно определить переходную функцию системы с заданной передаточной функцией.
Импульсная характеристика
Импульсной характеристикой системы Дельта-функция – это математическая идеализация предельно короткого импульсного сигнала. Иными словами, это импульс бесконечно большой амплитуды и бесконечно малой длительности, площадь которого равна единице. Дельта-функция определяется следующими соотношениями:
Дельта-функция просто связана с единичной ступенчатой функцией:
На графике дельта-функцию условно изображают в виде утолщения на оси ординат (рисунок 2.11). Для импульсной характеристики справедливо следующее соотношение:
Рисунок 2.11 – Дельта-функция
При известной импульсной характеристике
Выведем выражение, связывающее изображение импульсной характеристики
и изображение дельта-функции
получим:
Согласно формуле (2.18) переходная и импульсная функции связаны соотношением
Информация о временных характеристиках системы позволяет судить о том, как будет вести себя система при подаче на ее вход постоянных или импульсных воздействий. Кроме того, их анализ может помочь при оценке устойчивости системы и в установлении типа наблюдающихся в ней режимов (апериодических или колебательных).
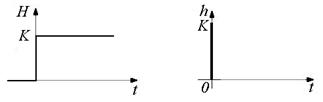
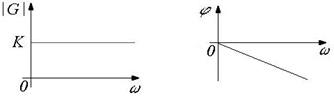
Усилительное звено
Усилительное звено изменяет величину передаваемого сигнала, не преобразуя характер его изменения во времени. Уравнение звена имеет следующий вид:
где Примерами такого звена могут служить рычажные усилители, блоки и трансформаторы. Рассчитаем основные характеристики усилительного звена. Выполним преобразование Лапласа над уравнением (2.24):
откуда получим выражение для передаточной функции:
Частотная характеристика звена примет вид
Учитывая соотношения (2.15), (2.16), выделим АЧХ и ФЧХ:
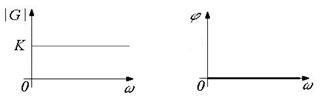
Частотные характеристики усилительного звена представлены на рисунке 2.13.
а) АЧХ б) ФЧХ Рисунок 2.13 – Частотные характеристики усилительного звена
Временные характеристики найдем с учетом выражений (2.17), (2.21). Для изображения переходной функции получим:
откуда
Для импульсной характеристики имеем
Временные характеристики усилительного звена представлены на рисунке 2.14.
а) переходная функция б) импульсная характеристика Рисунок 2.14 – Временные характеристики усилительного звена
Анализ временных и частотных характеристик усилительного звена показывает, что его выходная величина копирует изменение входной величины без запаздывания или искажения, то есть в звене отсутствуют переходные процессы. Поэтому его еще называют безынерционным звеном. Звено с запаздыванием
Звено с запаздыванием осуществляет операцию сдвига входного сигнала на время
где Выполнив преобразование Лапласа над уравнением (2.25), получим выражение для передаточной функции звена с запаздыванием:
Частотная характеристика примет вид
откуда с учетом выражения (2.13) выделим АЧХ и ФЧХ:
Частотные характеристики звена с запаздыванием представлены на рисунке 2.15. Временные характеристики звена с запаздыванием имеют очевидный вид
а) АЧХ б) ФЧХ Рисунок 2.15 – Частотные характеристики звена с запаздыванием
Примерами звеньев с запаздыванием служат различные системы передачи сигналов в системах связи, материалов и энергии в системах транспортировки, в которых естественно ограничены скорости распределения и передвижения. Интегрирующее звено Интегрирующее звено формирует на выходе сигнал, пропорциональный интегралу от входного сигнала. Уравнение звена имеет следующий вид:
где Иногда используется другая форма записи уравнения интегрирующего звена: где Примером интегрирующего звена может служить гидравлическая емкость цилиндрической формы, в которую поступает жидкость с объемной скоростью Площадь основания емкости – S, высота слоя жидкости – H. Уравнение, описывающее поведение системы, имеет вид:
или
откуда легко найти его решение:
Полученное выражение полность совпадает с уравнением интег-рирующего звена (2.27), где в качестве коэффициента усиления выступает величина, обратная площади основания емкости. Выполнив преобразование Лапласа над уравнением (2.27)
получим выражение для передаточной функции интегрирующего звена:
Частотная характеристика примет вид:
откуда выделим АЧХ и ФЧХ:
Частотные характеристики интегрирующего звена представлены на рисунке 2.18.
а) АЧХ б) ФЧХ Рисунок 2.18 – Частотные характеристики интегрирующего звена
Анализ АЧХ интегрирующего звена позволяет сделать вывод о его сглаживающих (фильтрующих) свойствах. Кроме того, интегрирующее звено вносит запаздывание выходного сигнала относительно входного сигнала на угол 90о. Для переходной функции справедливы соотношения:
H(t) = Kt. Для импульсной характеристики имеем:
Временные характеристики интегрирующего звена представлены на рисунке 2.19.
а) переходная функция б) импульсная характеристика
Рисунок 2.19 – Временные характеристики интегрирующего звена
Из графика переходной функции видно, что при воздействии постоянного сигнала выходной сигнал интегрирующего звена стационарного значения не принимает. Такие звенья носят названия астатических. Реальные интегрирующие звенья обладают определенной инерционностью, вследствие чего осуществляемое ими интегрирование не является точным. Передаточная функция реального интегрирующего звена имеет вид:
где Реальное интегрирующее звено можно заменить последовательным соединением двух звеньев – идеального интегрирующего и инерционного 1-го порядка.
Литература 1. Шишмарев, В.Ю. Основы автоматического управления: учебное пособие / В.Ю. Шишмарев. – М.: Академия, 2008. – 348 с. 2. Софиева, Ю.Н. Основы линейной теории автоматического регулирования / Ю.Н. Софиева, В.Я. Бадеников, А.Э. Софиев. – Иркутск: Изд-во Иркут. ун-та, 1994. – 124 с. 3. Бесекерский, В.А. Теория систем автоматического регулирования / В.А. Бесекерский, Е.П. Попов. – М.: Наука, 1975. – 767 с. 4. Иванов, В.А. Математические основы теории автоматического регулирования / В.А. Иванов, Б.К. Чемоданов, В.С. Медведев. – М.: Высшая школа, 1971. – 807 с. 5. Юревич, Е.И. Теория автоматического управления / Е.И. Юревич. – Л.: Энергия, 1975. – 416 с.
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Линейной системы
Рассмотрим, от чего зависит устойчивость системы и чем она определяется. Для этого обратимся к уравнению движения линейной системы n-го порядка:
где Уравнению (3.1) соответствует передаточная функция вида:
Решение неоднородного уравнения (3.1) состоит из двух слагаемых – частного решения
Решение уравнения (3.3) носит название собственного решения уравнения (3.1), и именно оно определяет устойчивость линейной системы в целом. Таким образом, устойчивость линейной системы является ее внутренним свойством, не зависящим от внешних воздействий. Общее решение однородного уравнения (3.3) имеет вид:
где
которое может быть получено путем приравнивания к нулю знаменателя передаточной функции системы (3.2). В общем случае корни
Соответствующее корню
Данная составляющая соответствует гармоническому колебанию с амплитудой, изменяющейся во времени по экспоненциальному закону. При этом, если В частном случае действительного корня Таким образом, в общем случае переходный процесс в системе состоит из колебательных и апериодических составляющих. Каждая колебательная составляющая обязана своим появлением паре комплексных сопряженных корней, а каждая апериодическая – действительному корню. Но независимо от типа корней необходимым и достаточным условием затухания переходного процесса в целом, а значит, и устойчивости системы является отрицательность действительных частей всех корней характеристического уравнения системы, то есть всех полюсов ее передаточной функции. Наличие пары чисто мнимых корней Необходимым условием устойчивости системы является строгая положительность коэффициентов характеристического уравнения (при условии, что Для суждения об устойчивости системы нет необходимости каждый раз находить корни ее характеристического уравнения. Это связано с тем, что разработаны косвенные признаки, по которым можно судить о знаках действительных частей этих корней, а тем самым и об устойчивости системы, не решая самого характеристического уравнения. Эти признаки называют критериями устойчивости. Существуют три основных критерия устойчивости: алгебраический критерий Рауса–Гурвица и частотные критерии Найквиста и Михайлова.
3.3 Критерий устойчивости Рауса–Гурвица
Английским математиком Е. Раусом и швейцарским математиком А. Гурвицем в конце XIX века были предложены правила, соблюдение которых является необходимым и достаточным условием устойчивости системы. По критерию Рауса–Гурвица условия устойчивости сводятся к выполнению ряда неравенств, связывающих коэффициенты характеристического уравнения (3.5) рассматриваемой системы
В первый столбец матрицы вписываются все нечетные коэффициенты характеристического уравнения, начиная с Критерий устойчивости Рауса–Гурвица формулируется следующим образом: для того чтобы рассматриваемая система Минор 1-го порядка совпадает с коэффициентом Строгая положительность минора 2-го порядка определяет условие устойчивости системы 3-го порядка:
Минор 3-го порядка имеет вид:
Очевидно, что условия устойчивости, вытекающие из критерия Рауса–Гурвица, усложняются с ростом порядка системы. Поэтому данный критерий применяют только для систем невысокого порядка, как правило, не выше четвертого.
Запас устойчивости
В условиях эксплуатации параметры системы автоматического управления могут изменяться в определенных пределах по различным причинам, например, вследствие старения, температурных колебаний и т.п. Колебания параметров могут привести к потере устойчивости системы, если она работает вблизи границы устойчивости. Совокупность значений параметров системы, при которых система остается устойчивой, называют областью устойчивости системы. Совокупность значений параметров, при которых совершается переход из области устойчивости в область неустойчивости, и наоборот, называют границей области устойчивости. При проектировании системы управления необходимо не только обеспечить ее устойчивость, но и выбрать ее параметры достаточно далеко от границы области устойчивости. Для суждения о степени близости системы к границе области устойчивости используют понятие запаса устойчивости. В случае применения критерия Рауса–Гурвица о запасе устойчивости можно судить по тому запасу, с которым выполняются входящие в этот критерий неравенства. При использовании частотных критериев запас устойчивости определяется удаленностью соответствующих характеристик от критического положения, при котором система находится на границе устойчивости. Для критерия Найквиста это – удаленность годографа разомкнутой системы от точки с координатами Основное распространение в качестве меры запаса устойчивости применительно к критерию Найквиста получили две величины – запас устойчивости по амплитуде (по коэффициенту усиления) Запас устойчивости по амплитуде определяется расстоянием Запас устойчивости по фазе определяется углом
Рисунок 3.7 – Запас устойчивости по амплитуде
При проектировании САУ рекомендуется выбирать
Структурная устойчивость
Пусть какая-либо система задана своей структурной схемой, то есть известно, из каких звеньев она состоит и какого рода связи осуществляются между звеньями. Совокупность положительных числовых значений всех постоянных времени и иных коэффициентов, которые необходимо знать для получения коэффициентов характеристического уравнения, носит название параметров системы. Изменение отличных от нуля параметров системы не вызывает изменения ее структурной схемы. В ряде случаев оказывается, что система неустойчива при любых значениях своих параметров, и добиться ее устойчивости можно только путем изменения структурной схемы. Такие системы называют структурно неустойчивыми, в отличие от структурно устойчивых систем, которые могут быть сделаны устойчивыми простым выбором соответствующих параметров. Таким образом, САУ может быть неустойчива по двум причинам: либо неподходящий состав динамических звеньев (структурно неустойчивая САУ), либо неподходящие значения параметров звеньев (структурно устойчивая САУ). Структурно неустойчивую систему можно сделать устойчивой, включив в нее корректирующие звенья или с помощью местных обратных связей. Основные результаты по структурной устойчивости линейных систем были получены М.А. Айзерманом и сформулированы им в виде двух теорем. Для их рассмотрения введем понятия оператора воздействия и собственного оператора системы. Вспомним, что в общем виде передаточная функция любой системы может быть представлена в виде отношения двух полиномов (п. 2.4.1):
или
где С другой стороны, известно, что передаточная функция определяется через изображения Лапласа выходного и входного сигналов системы по формуле
Поэтому справедливым оказывается соотношение
откуда ясен смысл названия операторов Первая теорема Айзермана сформулирована для замкнутых систем
где Теорема Айзермана гласит, что для структурной устойчивости рассматриваемых систем необходимо и достаточно одновременное выполнение следующих неравенств:
где Таким образом, система не должна одновременно содержать более одного интегрирующего и одного неустойчивого звеньев. Кроме того, для системы с одним консервативным звеном можно добиться устойчивости лишь в том случае, когда ее порядок выше 4, с двумя консервативными звеньями – выше 8 и т.д. Второе из неравенств (3.9) выполняется практически всегда, поскольку число консервативных звеньев мало. Чаще всего они отсутствуют. Вторая теорема Айзермана сформулирована для замкнутых систем
где Звено с передаточной функцией вида Основной вывод из 2-й теоремы Айзермана состоит в том, что наличие в системе звеньев с воздействием по производной облегчает достижение ее структурной устойчивости.
3.10 Контрольные вопросы
1. Сформулируйте необходимое и достаточное условия устойчивости линейной САУ. 2. Поясните способ получения характеристического уравнения системы. 3. Сформулируйте алгебраический критерий устойчивости линейной САУ. 4. Как оценить устойчивость замкнутой системы без графического построения годографа разомкнутой системы? 5. В чем отличия между структурно устойчивой и структурно неустойчивой системами? Литература 1. Шишмарев, В.Ю. Основы автоматического управления: учебное пособие / В.Ю. Шишмарев. – М.: Академия, 2008. – 348 с. 2. Софиева, Ю.Н. Основы линейной теории автоматического регулирования / Ю.Н. Софиева, В.Я. Бадеников, А.Э. Софиев. – Иркутск: Изд-во Иркут. ун-та, 1994. – 124 с. 3. Бесекерский, В.А. Теория систем автоматического регулирования / В.А. Бесекерский, Е.П. Попов. – М.: Наука, 1975. – 767 с. 4. Иванов, В.А. Математические основы теории автоматического регулирования / В.А. Иванов, Б.К. Чемоданов, В.С. Медведев. – М.: Высшая школа, 1971. – 807 с. 5. Юревич, Е.И. Теория автоматического управления / Е.И. Юревич. – Л.: Энергия, 1975. – 416 с.
Корректирующие звенья
Коррекция проводится с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с корректируемым звеном
а) последовательное включение б) параллельное включение Рисунок 4.1 – Способы включения корректирующих звеньев в систему
Корректирующие обратные связи, помимо классификации на отрицательные и положительные, делятся на жесткие и гибкие. Идеальная жесткая обратная связь осуществляется усилительным звеном с передаточной функцией В линейных системах оба рассмотренных типа коррекции (последовательный и параллельный) эквивалентны, то есть последовательное звено может быть заменено параллельным и, наоборот, при сохранении неизменными динамических свойств САУ. Приравняем результирующие передаточные функции, полученные при использовании обоих типов коррекции:
Отсюда, например, вытекает следующее выражение для передаточной функций последовательного корректирующего звена, эквивалентного данной обратной связи:
Рассмотрим пример коррекции свойств САУ. Пример 4. Охватим жесткой обратной связью интегрирующее звено в составе некоторой САУ (рисунок 4.2).
Рисунок 4.2 – Коррекция свойств интегрирующего звена
В результате коррекции передаточная функция звена примет вид:
где Таким образом, получен важный результат – при охвате интегрирующего звена жесткой обратной связью оно преобразуется в инерционное звено 1-го порядка. Такой прием широко используют для снижения порядка астатизма (количества интегрирующих звеньев) системы и, соответственно, для улучшения ее устойчивости и качества переходных процессов.
ПИД - регулятор
Изменение свойств САУ путем введения корректирующих звеньев возможно, если известны характеристики элементов системы, подлежащие коррекции. Однако практика конструирования САУ различного назначения позволила найти общие принципы управления, применение которых обеспечивает требуемые качества САУ даже в отсутствие полной информации о свойствах системы. Одним из самых распространенных классов САУ являются системы автоматического регулирования, задача которых заключается в поддержании текущего значения выходной величины объекта на заданном уровне. Устройство управления, которое в этом случае называют регулятором, формирует управляющее воздействие Наибольшее применение в системах управления по отклонению получил алгоритм, носящий название пропорционально-интегро-дифференцирующего закона регулирования:
где В системах автоматического регулирования в зависимости от вида используемой коррекции регуляторы классифицируются на следующие типы: пропорциональный (П), интегрирующий (И), пропорционально-интегрирующий (ПИ), пропорционально-дифференциру-ющий (ПД) и пропорционально-интегро-дифференцирующий (ПИД) регуляторы. Соответственно говорят об одноименных алгоритмах или законах регулирования. Таким образом, САР можно рассматривать, как систему с отрицательной обратной связью, для улучшения характеристик которой применяют последовательное корректирующее звено в виде ПИД-ре-гулятора или его вариантов (рисунок 4.3).
Рисунок 4.3 – ПИД-регулятор в составе САР
Оценим влияние отдельных составляющих ПИД-закона регулирования на точность, устойчивость и быстродействие систем. Пропорциональный регулятор
Выходной сигнал П-регулятора пропорционален сигналу ошибки:
откуда передаточная функция равна коэффициенту усиления:
Для анализа системы в качестве объекта управления выберем инерционное звено 1-го порядка:
Передаточная функция замкнутой системы с единичной обратной связью примет вид:
где Для проверки системы на точность подадим на ее вход ступенчатый сигнал
Для определения выходного сигнала воспользуемся теоремой о конечных значениях:
Из данной формулы видно, что для уменьшения установившейся ошибки необходимо выбрать коэффициент усиления Передаточная функция Влияние П-регулятора на быстродействие системы оценим по величине постоянной времени Таким образом, пропорциональный регулятор обеспечивает невысокую точность, повышает быстродействие и не влияет на устойчивость системы.
Интегрирующий регулятор
Выходной сигнал И-регулятора пропорционален интегралу от сигнала ошибки:
а передаточная функция равна:
Для анализа системы в качестве объекта управления вновь выберем инерционное звено 1-го порядка:
тогда передаточная функция замкнутой системы с единичной обратной связью примет вид:
Для проверки системы на точность подадим на ее вход ступенчатый сигнал и рассчитаем значение установившейся ошибки:
где Окончательно получим:
Это означает, что И-регулятор обеспечивает абсолютную точность системы, делая ее астатической. Для анализа устойчивости системы рассмотрим ее характеристическое уравнение
где Порядок системы увеличился до 2-го, однако коэффициенты характеристического уравнения остались строго положительными, что достаточно для устойчивости. С увеличением коэффициента усиления Таким образом, И-регулятор увеличил порядок системы и в принципе может изменить тип переходных процессов. В рассматриваемом примере это не привело к потере устойчивости, однако с увеличением порядка объекта управления это вполне возможно. Влияние И-регулятора на быстродействие системы рассмотрим на примере усилителя, который относится к безынерционным звеньям:
Передаточная функция замкнутой системы с единичной обратной связью уже будет соответствовать инерционному звену 1-го порядка:
где Очевидно, что И-регулятор замедляет переходные процессы. Итак, интегрирующий регулятор обеспечивает абсолютную точность системы, но отрицательно влияет на устойчивость системы и снижает ее быстродействие. Дифференцирующий регулятор
Выясним причину, по которой не используется в чистом виде управляющее воздействие, пропорциональное скорости рассогласования:
Выберем в качестве объекта управления инерционное звено 1-го порядка:
и рассчитаем переходную характеристику
где Учитывая связь
В установившемся режиме при входном сигнале Полученные результаты объясняют причину, по которой отдельно дифференциальная составляющая управления не применяется – система автоматического управления при этом не выполняет своих функций слежения или стабилизации.
Регулятор
Выходной сигнал ПИД-регулятора формируется в виде
где Выведем выражение для передаточной функции ПИД-регулятора, для чего осуществим преобразование Лапласа над его уравнением:
откуда
Передаточная функция ПИД-регулятора состоит из 3-х слагаемых, что соответствует параллельному включению трех звенев – усилительного, интегрирующего и идеального дифференцирующего. ПИД-регулятор с взаимосвязанными параметрами настройки описывается выражением
где ПИД-регулятор обеспечивает более сильную коррекцию динамических свойств САУ,сочетая в себе характеристики ранее рассмотренных регуляторов. Дискретный ПИД - регулятор
Применение цифровой вычислительной техники в системах автоматического управления позволяет заменить непрерывные регуляторы цифровыми. При этом сигналы поступают в систему регулирования в дискретные моменты времени с некоторым интервалом Дискретная система характеризуется в динамике разностным уравнением, устанавливающим связь между двумя дискретными функциями в рекуррентной форме. Один из способов построения разностных уравнений состоит в дискретизации интегро-дифференциальных уравнений. При этом интегралы заменяются суммами (например, по методу прямоугольников или трапеций), а производные – конечными разностями на основе соотношений, представленных в таблице 2. Таблица 2 – Соответствие производных и конечных разностей
Простейший способ получения дискретного алгоритма управления по ПИД-закону состоит в переходе от уравнения непрерывного регулятора
к разностному уравнению. При интегрировании по методу прямоугольника получим:
где В выражении (4.11) для формирования суммы необходимо помнить все предыдущие значения сигнала ошибки Позиционный алгоритм можно преобразовать в рекуррентный, по которому текущее значение управления вычисляется как сумма предыдущего значения и некоторой поправки:
где Для определения
В результате получим:
где Таким образом, по алгоритму (4.12) на каждом шаге требуется вычислять только текущее приращение управляющей переменной и помнить лишь три значения сигнала ошибки (текущее и два предыдущих). Поэтому он носит название быстрого, или скоростного алгоритма дискретного ПИД-регулятора. При малых значениях шага дискретизации переходные процессы в дискретной и непрерывной системах регулирования практически совпадают, поэтому выбор параметров настройки дискретных регуляторов производят по тем же соотношениям, что и для непрерывных. Литература
1. Шишмарев, В.Ю. Основы автоматического управления: учебное пособие / В.Ю. Шишмарев. – М.: Академия, 2008. – 348 с. 2. Софиева, Ю.Н. Основы линейной теории автоматического регулирования / Ю.Н. Софиева, В.Я. Бадеников, А.Э. Софиев. – Иркутск: Изд-во Иркут. ун-та, 1994. – 124 с. 3. Юревич, Е.И. Теория автоматического управления / Е.И. Юревич. – Л.: Энергия, 1975. – 416 с. 4. Наладка средств автоматизации и автоматических средств регулирования: справочное пособие / под редакцией Клюева А.С. – М.: Энергоатомиздат, 1989. – 447 с. 5. Штейнберг, Ш.Е. Промышленные автоматические регуляторы / Ш.Е. Штейнберг, Л.О. Хвилевицкий, М.Я. Ястребенецкий. – М.: Энергия, 1973. – 321 с.
Управления
Цифровыми системами называют дискретные системы, в которых происходит квантование сигналов как по времени, так и по уровню. Другими словами, в них существуют дискретные сигналы в виде цифрового кода. Цифровые САУ – это наиболее совершенные по своим алгоритмическим возможностям дискретные САУ. В них в состав управляющего устройства входит цифровая вычислительная машина. Преобразование непрерывной величины в цифровую заключается в квантовании ее по времени, по уровню и представлении полученных дискретных значений в виде чисел, то есть в цифровом коде. Это преобразование может осуществляться либо путем последовательного выполнения перечисленных выше этапов, либо сразу в виде одной операции, называемой кодо-импульсной модуляцией. Поэтому цифровые системы иногда называют кодо-импульсными системами. В них каждое значение преобразуемой входной величины представляется определенной комбинацией дискретных значений. Существуют различные цифровые коды. В случае десятичного кода дискретная величина выражается в виде десятичного числа и представляется серией импульсов, количество которых равно числу разрядов этого числа. Каждый импульс несет информацию о цифре определенного разряда. Для этого модулируемый параметр импульса принимает одно из десяти дискретных значений. Наибольшее распространение получил двоичный код, соответствующий системе счисления с основанием 2. Каждый разряд двоичного числа может иметь только одно из двух значений: 0 или 1. Преобразование непрерывной величины в цифровой код принципиально содержит погрешность из-за квантования по уровню, то есть округления численного значения преобразуемой величины до целого числа, соответствующего номеру уровня квантования. Абсолютное значение погрешности квантования определяется величиной шага квантования – интервалом между двумя соседними уровнями квантования. Во всех цифровых САУ преобразование непрерывной величины в цифровую осуществляется путем квантования с округлением до ближайшего уровня. Основные достоинства цифровых САУ определяются теми возможностями, которые возникают в результате применения цифровой техники. Это, прежде всего, высокая точность, помехозащищенность и возможность реализации очень сложных алгоритмов управления, какие только доступны современным ЦВМ. Применение вычислительных машин позволяет, варьируя передаточные функции корректирующих звеньев и значения их параметров в широких пределах, быстро получить большое количество соответствующих кривых переходных процессов. Поэтому выбор коррекции и значений варьируемых параметров может быть выполнен простым перебором возможных вариантов. Полученная картина позволяет выбрать оптимальный способ коррекции. Все эти достоинства цифровых систем достигаются ценой значительно большей их сложности и стоимости. Поэтому, как правило, цифровые САУ применяются в тех случаях, когда иными, более простыми средствами задача решена быть не может. Например, существуют цифровые системы программного регулирования с цифровым задатчиком программы, цифровые следящие системы с цифровыми измерителями рассогласования и шаговыми исполнительными двигателями. Широко применяются цифровые регуляторы, особенно интегрального типа, в которых цифровое представление регулируемой величины позволяет осуществлять интегрирование с любой степенью точности. Однако основная область применения цифровых систем – это системы со сложным алгоритмом преобразования информации в управляющем устройстве, требующим применения ЦВМ. Примерами таких цифровых САУ являются системы управления судами, самолетами и ракетами с помощью малогабаритных бортовых ЦВМ, системы централизованного автоматического управления производством. В таких системах количество входных и выходных величин объекта управления может измеряться сотнями, а расстояния, на которые передаются эти величины, – тысячами километров. Цифровая система управления схематично изображена на рисун-ке 5.1.
Рисунок 5.1 – Принципиальная схема цифровой системы управления Объект управления имеет на выходе непрерывный сигнал Работа синхронизируется в компьютере таймером реального времени. ЦВМ функционирует последовательно. Каждая операция занимает определенное время, но на выходе ЦАП должен иметь непрерывный по времени сигнал.
Управления
Наличие в цифровой системе квантования по уровню делает ее принципиально нелинейной, что может привести к неустойчивости в малом с установлением автоколебаний, амплитуда которых определяется зоной нечувствительности системы, равной шагу квантования. Статическая точность цифровой САУ также зависит от шага квантования, минимальная величина которого ограничена точностью измерения выходных величин объекта, а также возможной точностью преобразования их в цифровую форму. При уменьшении шага квантования, то есть при увеличении количества уровней квантования и числа разрядов цифрового кода, цифровая система приближается по своим свойствам к импульсной системе. При достаточно малом шаге квантования квантованием по уровню можно пренебречь и приближенно рассматривать цифровую систему как импульсную. Такая система называется предельной импульсной системой. Особенностью динамики цифровых САУ по сравнению с импульсными является обязательное наличие фиксированного временного запаздывания в управляющем устройстве, определяемого длительностью одного цикла переработки информации в ЦВМ. Математическое описание цифровых САУ осуществляется с помощью разностных уравнений и дискретного преобразования Лапласа путем предварительной замены действующих в непрерывной части системы непрерывных величин на дискретные величины в виде решетчатых функций. В связи с тем, что в цифровых САУ имеется квантование по уровню, их структурная схема содержит, помимо импульсных элементов, квантователи – нелинейные звенья с многоступенчатой релейной статической характеристикой. Коррекция цифровых САУ осуществляется, прежде всего, путем выбора соответствующего алгоритма ЦВМ, входящей в состав управляющего устройства. Поэтому в таких системах принципиально применимы любая коррекция, любой алгоритм управления, которые могут быть реализованы с помощью соответствующей ЦВМ. При этом усложнение алгоритма работы управляющего устройства не ведет к снижению точности его реализации, как у систем непрерывного действия. Литература
1. Шишмарев, В.Ю. Основы автоматического управления: учебное пособие / В.Ю. Шишмарев. – М.: Академия, 2008. – 348 с. 2. Изерман, Р. Цифровые системы управления / Р. Изерман. – М.: Мир, 1984. – 541 с. 3. Острем, К. Системы управления с ЭВМ / К. Острем, Б. Виттенмарк. – М.: Мир, 1987. – 480 с. 4. Юревич, Е.И. Теория автоматического управления / Е.И. Юревич. – Л.: Энергия, 1975. – 416 с.
Учебное издание
Гареева Рената Гегелевна
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Курс лекций
Редактор Соловьева С.В.
Подписано в печать 22.09.2010. Формат 60´84 1/16 Усл. п. л. - 4,9. Уч.-изд. л. - 5,3 Печать - ризография, множительно-копировальный аппарат «RISO EZ300»
Тираж 75 экз. Заказ 2010-139 Издательство Алтайского государственного технического университета 656038, г. Барнаул, пр-т Ленина, 46
Оригинал-макет подготовлен ИИО БТИ АлтГТУ Отпечатано в ИИО БТИ АлтГТУ 659305, г. Бийск, ул. Трофимова, 27
Бийский технологический институт (филиал) государственного образовательного учреждения высшего профессионального образования «Алтайский государственный технический университет им. И.И. Ползунова»
Р.Г. Гареева
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Курс лекций
Бийск Издательство Алтайского государственного технического университета им. И.И. Ползунова 2010 УДК 681.51(075.8) ББК 32.965 Г 20
Основы теории управления: курс лекций / Р.Г. Гареева; Алт. гос. техн. ун-т, БТИ. – Бийск: Изд-во Алт. гос. техн. ун-та, 2010. – 85 с.
В курсе лекций приводятся классификация систем управления, примеры составления дифференциальных уравнений простейших объектов регулирования, правила преобразования структурных схем, различные виды динамических характеристик линейных систем, критерии устойчивости и качества переходных процессов, типовые законы регулирования, особенности математического описания цифровых систем управления. Курс лекций предназначен для студентов специальности 230201 «Информационные системы и технологии» дневной формы обучения по дисциплине «Основы теории управления».
УДК 681.51(075.8) ББК 32.965
Рассмотрено и одобрено на заседании научно-методического совета Бийского технологического института. Протокол № 7 от 01.07.2010 г.
© Гареева Р.Г., 2010 © БТИ АлтГТУ, 2010
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
Совершенствование технологий и повышение производительности труда во всех отраслях народного хозяйства относятся к важнейшим задачам технического прогресса нашего общества. Решение этих задач возможно лишь при широком внедрении систем автоматического управления как отдельными объектами, так и производством в целом. Поэтому изучение основ теории автоматического управления (ТАУ) и регулирования (ТАР) предусматривается при подготовке выпускников практически всех инженерных специальностей.
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В настоящее время в науке и технике широко используется понятие управления. Под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели на основе заданного алгоритма управления. Управление каким-либо объектом – это процесс воздействия на него с целью обеспечения требуемого течения процесса в объекте или требуемого изменения его состояния. Одной из важнейших проблем управления является получение наилучшего процесса, соответствующего назначению данного объекта. В зависимости от поставленной задачи наилучший процесс характеризуется наибольшей эффективностью, безопасностью, точностью, надежностью, быстродействием или, как правило, сочетанием этих факторов. Понятие управления связано с такими исходными понятиями, как объект управления, воздействие и цель. Объект управления (ОУ) может принадлежать как к неживой природе, в частности, быть техническим устройством (самолет, станок и т.п.), так и к живой природе (коллектив людей, животное и т.п.). Управляемой величиной (y) называют величину, характеризующую состояние объекта управления (его скорость, давление, температуру), значение которой требуется поддерживать постоянным или изменять надлежащим образом. Целенаправленное изменение режима работы объекта управления достигается воздействием на специальные каналы (входы) объекта. Эти воздействия называются управляющими. Управляющие воздействия на объект управления определяются характером поступающей информации, то есть сведениями о предполагаемом или прошедшем состоянии системы. Это в первую очередь характеристики и параметры объекта, а также данные о значениях координат, определяющих ход управляемого процесса. Определение величины и характера необходимого воздействия на объект, а также его осуществление могут выполняться человеком (самолетом управляет пилот) или специальным техническим устройством (самолетом управляет автопилот), называемым устройством управления (УУ). Системой управления (СУ) называют совокупность объекта управления и управляющего устройства, процесс взаимодействия которых приводит к выполнению поставленной цели управления. Если устройство управления функционирует без участия человека, то систему называют системой автоматического управления (САУ). Процесс управления подразумевает наличие умения и способности создать целенаправленное воздействие. Эти свойства определяют алгоритм управления. Под алгоритмом управления понимают совокупность правил, методов и способов, позволяющих синтезировать целенаправленное воздействие, если известно действительное состояние объекта управления. Блок-схему системы управления можно представить в следующем виде (рисунок 1.1).
x – входной сигнал; y – выходной сигнал; u – управляющее воздействие Рисунок 1.1 – Блок-схема системы управления Устройство управления на основе цели управления и в соответствии с алгоритмом управления вырабатывает управляющие воздействия, которые должны удовлетворять выбранному критерию управления и ограничениям, задаваемым моделью объекта управления. Качество процесса управления характеризуется тем, насколько процесс управления близок к желаемому. Количественно оно определяется критериями качества, которые выбираются в соответствии с целью управления. К ним могут относиться величина максимального отклонения управляемой величины от заданного значения, колебательность переходного процесса, его длительность и т.п. Точность управления характеризуется погрешностью системы в установившихся режимах, например, величиной установившегося отклонения управляемой величины от заданного значения по окончании переходного процесса. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 275; Нарушение авторского права страницы

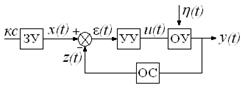
 – входной сигнал; e – сигнал рассогласования;
– входной сигнал; e – сигнал рассогласования; – управляющее воздействие; h – помехи;
– управляющее воздействие; h – помехи;  – выходной сигнал;
– выходной сигнал; – сигнал обратной связи; КС – командный сигнал;
– сигнал обратной связи; КС – командный сигнал; называют задающим воздействием, уставкой или входным сигналом системы управления.
называют задающим воздействием, уставкой или входным сигналом системы управления. (как правило, с отрицательным знаком), а на выходе формируется сигнал
(как правило, с отрицательным знаком), а на выходе формируется сигнал  , называемый сигналом ошибки или сигналом рассогласования, который является входным для устройства управления.
, называемый сигналом ошибки или сигналом рассогласования, который является входным для устройства управления.
 h; вычислительное устройство, реализующее алгоритм работы управляющего устройства при соответствующей обработке входной информации; исполнительный механизм для непосредственного управления объектом.
h; вычислительное устройство, реализующее алгоритм работы управляющего устройства при соответствующей обработке входной информации; исполнительный механизм для непосредственного управления объектом. формирует такое управляющее воздействие
формирует такое управляющее воздействие  которое при воздействии на объект управления должно обеспечить достижение цели управления, а именно – свести к нулю или к минимально допустимому значению отклонение управляемой величины
которое при воздействии на объект управления должно обеспечить достижение цели управления, а именно – свести к нулю или к минимально допустимому значению отклонение управляемой величины  от требуемого значения
от требуемого значения  . Далее выходной сигнал
. Далее выходной сигнал  , а на выходе формируется сигнал
, а на выходе формируется сигнал  (рисунок 2.5).
(рисунок 2.5).
 существует преобразование Лапласа
существует преобразование Лапласа и
и  ,
, . (2.6)
. (2.6) и изображение
и изображение  входного воздействия
входного воздействия  , можно найти изображение выходного сигнала звена по соотношению:
, можно найти изображение выходного сигнала звена по соотношению: . (2.7)
. (2.7) к оригиналу
к оригиналу  :
: . (2.12)
. (2.12) , (2.13)
, (2.13) – амплитудная частотная характеристика (АЧХ);
– амплитудная частотная характеристика (АЧХ); – фазовая частотная характеристика (ФЧХ).
– фазовая частотная характеристика (ФЧХ). , (2.14)
, (2.14) – действительная и мнимая части соответственно.
– действительная и мнимая части соответственно. , (2.15)
, (2.15) . (2.16)
. (2.16)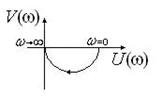
 в пределах
в пределах  .
. называют ее отклик на входное воздействие в виде единичной ступенчатой функции, при условии, что на момент поступления воздействия система находилась в покое (что соответствует нулевым начальным условиям).
называют ее отклик на входное воздействие в виде единичной ступенчатой функции, при условии, что на момент поступления воздействия система находилась в покое (что соответствует нулевым начальным условиям). (функция Хевисайда, или функция включения) представляет собой воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным (рисунок 2.10).
(функция Хевисайда, или функция включения) представляет собой воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным (рисунок 2.10).

 при
при 
 и передаточную функцию системы
и передаточную функцию системы  . Учитывая формулу
. Учитывая формулу ,
, . (2.17)
. (2.17) называют ее отклик на входное воздействие в виде дельта-функции при условии, что на момент поступления воздействия система находилась в покое.
называют ее отклик на входное воздействие в виде дельта-функции при условии, что на момент поступления воздействия система находилась в покое.
 .
. . (2.18)
. (2.18) при
при  .
.
 . (2.19)
. (2.19) и передаточную функцию системы
и передаточную функцию системы  ,
, . (2.20)
. (2.20) . (2.21)
. (2.21) , (2.24)
, (2.24) – коэффициент усиления (передачи), который может принимать как положительное, так и отрицательное действительное значение.
– коэффициент усиления (передачи), который может принимать как положительное, так и отрицательное действительное значение. ,
, .
. .
. ,
,  .
.
 ,
, .
. .
.
 в прошлое. Уравнение звена имеет следующий вид:
в прошлое. Уравнение звена имеет следующий вид: , (2.25)
, (2.25) – время запаздывания.
– время запаздывания. ,
, .
. ,
, ,
,  .
. ,
,  .
.
 , (2.27)
, (2.27) – коэффициент усиления.
– коэффициент усиления. ,
,  – постоянная времени интегрирующего звена.
– постоянная времени интегрирующего звена. (см. рисунок 2.2).
(см. рисунок 2.2).
 ,
, .
.  ,
, .
. ,
, ,
,  .
.
 ,
,

 ,
, – коэффициент усиления;
– коэффициент усиления; – постоянная времени.
– постоянная времени.
 , (3.1)
, (3.1) – входной и выходной сигналы системы соответственно;
– входной и выходной сигналы системы соответственно; – постоянные величины.
– постоянные величины. . (3.2)
. (3.2) неоднородного уравнения и общего решения
неоднородного уравнения и общего решения  однородного уравнения:
однородного уравнения: . (3.3)
. (3.3) , (3.4)
, (3.4) – постоянные величины, определяемые из начальных условий;
– постоянные величины, определяемые из начальных условий;  – корни соответствующего характеристического уравнения
– корни соответствующего характеристического уравнения , (3.5)
, (3.5) .
. .
. , составляющая будет затухать, то есть
, составляющая будет затухать, то есть  при
при  . Наоборот, при
. Наоборот, при  будут наблюдаться расходящиеся колебания. Если
будут наблюдаться расходящиеся колебания. Если  , что соответствует чисто мнимым корням, колебания будут незатухающими.
, что соответствует чисто мнимым корням, колебания будут незатухающими. соответствующая ему составляющая переходного процесса представляет собой экспоненту, которая будет затухать или возрастать также в зависимости от знака
соответствующая ему составляющая переходного процесса представляет собой экспоненту, которая будет затухать или возрастать также в зависимости от знака  .
. соответствует граничному случаю между устойчивостью и неустойчивостью – система при этом находится на границе устойчивости. Такой режим так же неработоспособен, как и неустойчивый.
соответствует граничному случаю между устойчивостью и неустойчивостью – система при этом находится на границе устойчивости. Такой режим так же неработоспособен, как и неустойчивый. , чего всегда можно добиться умножением уравнения на минус
, чего всегда можно добиться умножением уравнения на минус  ). Если хотя бы один из коэффициентов характеристического уравнения будет отрицателен или равен нулю, система однозначно будет являться неустойчивой. Однако положительность всех коэффициентов характеристического уравнения еще не гарантирует устойчивости этой системы. Необходимое условие устойчивости является и достаточным условием только для систем 1-го и
). Если хотя бы один из коэффициентов характеристического уравнения будет отрицателен или равен нулю, система однозначно будет являться неустойчивой. Однако положительность всех коэффициентов характеристического уравнения еще не гарантирует устойчивости этой системы. Необходимое условие устойчивости является и достаточным условием только для систем 1-го и  -го порядка. Для этого строится матрица Гурвица, содержащая
-го порядка. Для этого строится матрица Гурвица, содержащая  строк и
строк и  столбцов:
столбцов: . (3.6)
. (3.6) , после чего столбец заполняется нулями до положенного числа
, после чего столбец заполняется нулями до положенного числа  элементов. Затем каждая строка матрицы дописывается последовательно коэффициентами с убывающими номерами вплоть до
элементов. Затем каждая строка матрицы дописывается последовательно коэффициентами с убывающими номерами вплоть до  , после чего оставшиеся элементы вновь заполняются нулями.
, после чего оставшиеся элементы вновь заполняются нулями. -го порядка включительно были строго положительны.
-го порядка включительно были строго положительны. :
:  .
. .
. .
. , а для критерия Михайлова – удаленность годографа замкнутой системы от начала координат.
, а для критерия Михайлова – удаленность годографа замкнутой системы от начала координат. и запас устойчивости по фазе
и запас устойчивости по фазе  .
. от критической точки с координатами
от критической точки с координатами  между отрицательным направлением вещественной полуоси и лучом, проведенным из начала координат в точку пересечения годографа с окружностью единичного радиуса (см. рисунок 3.7). Он гарантирует сохранение устойчивости, несмотря на наличие, например, «паразитных» запаздываний, которые не учтены в системе.
между отрицательным направлением вещественной полуоси и лучом, проведенным из начала координат в точку пересечения годографа с окружностью единичного радиуса (см. рисунок 3.7). Он гарантирует сохранение устойчивости, несмотря на наличие, например, «паразитных» запаздываний, которые не учтены в системе.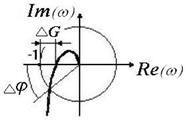
 и по фазе
и по фазе  и
и  дБ. Последнее соответствует примерно двойному запасу устойчивости по коэффициенту усиления (относительно его предельного значения).
дБ. Последнее соответствует примерно двойному запасу устойчивости по коэффициенту усиления (относительно его предельного значения).
 ,
, – оператор воздействия системы;
– оператор воздействия системы; – собственный оператор системы.
– собственный оператор системы. .
. ,
, и
и  .
. -го порядка, характеристическое уравнение которых имеет вид
-го порядка, характеристическое уравнение которых имеет вид ,
, ;
; ;
; – постоянные коэффициенты усиления отдельных звеньев системы;
– постоянные коэффициенты усиления отдельных звеньев системы; – собственные операторы звеньев.
– собственные операторы звеньев. (3.9)
(3.9)  – количество интегрирующих звеньев;
– количество интегрирующих звеньев; – количество неустойчивых инерционных звеньев;
– количество неустойчивых инерционных звеньев; – количество консервативных звеньев.
– количество консервативных звеньев. -го порядка, характеристическое уравнение которых имеет вид
-го порядка, характеристическое уравнение которых имеет вид ,
, ;
; ;
; – операторы воздействия отдельных звеньев системы.
– операторы воздействия отдельных звеньев системы. носит название идеального форсирующего (упреждающего) звена, или звена с воздействием по 1-й производной.
носит название идеального форсирующего (упреждающего) звена, или звена с воздействием по 1-й производной. , либо параллельно ему с образованием местной обратной связи (рисунок 4.1).
, либо параллельно ему с образованием местной обратной связи (рисунок 4.1).  и параллельные
и параллельные  . Следует отметить, что при параллельной коррекции основное применение получил именно вариант обратной (отрицательной) связи, а не прямого включения.
. Следует отметить, что при параллельной коррекции основное применение получил именно вариант обратной (отрицательной) связи, а не прямого включения.

 , идеальная гибкая обратная связь – дифференцирующим звеном с передаточной функцией
, идеальная гибкая обратная связь – дифференцирующим звеном с передаточной функцией  , реальная гибкая обратная связь – реальным дифференцирующим звеном с передаточной функцией
, реальная гибкая обратная связь – реальным дифференцирующим звеном с передаточной функцией  .
. .
. . (4.1)
. (4.1)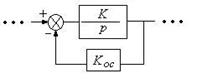
 ,
, ,
,  .
. в соответствии с некоторым алгоритмом.
в соответствии с некоторым алгоритмом. , (4.2)
, (4.2) – сигнал ошибки (рассогласования);
– сигнал ошибки (рассогласования); – коэффициент усиления пропорциональной части управления;
– коэффициент усиления пропорциональной части управления; – коэффициент усиления интегральной части управления;
– коэффициент усиления интегральной части управления; – коэффициент усиления дифференциальной части управления;
– коэффициент усиления дифференциальной части управления; – время регулирования.
– время регулирования.
 ,
, . (4.3)
. (4.3) .
. ,
, ,
,  .
. и рассчитаем значение ошибки
и рассчитаем значение ошибки  в установившемся состоянии по соотношению
в установившемся состоянии по соотношению .
. откуда окончательно получим
откуда окончательно получим . (4.4)
. (4.4) регулятора как можно большим. Однако в реальных системах
регулятора как можно большим. Однако в реальных системах  является величиной ограниченной, поэтому добиться с помощью пропорционального регулятора абсолютной точности, когда
является величиной ограниченной, поэтому добиться с помощью пропорционального регулятора абсолютной точности, когда  , невозможно.
, невозможно. рассматриваемой системы соответствует инерционному звену 1-го порядка. Это означает, что
рассматриваемой системы соответствует инерционному звену 1-го порядка. Это означает, что  . Очевидно, что с ростом значения
. Очевидно, что с ростом значения  ,
, . (4.5)
. (4.5) ,
, .
. ,
, .
. .
. ,
, .
. регулятора дискриминант характеристического уравнения может стать отрицательным
регулятора дискриминант характеристического уравнения может стать отрицательным  , в результате чего его корни примут комплексный сопряженный вид, что соответствует затухающим колебательным режимам в системе.
, в результате чего его корни примут комплексный сопряженный вид, что соответствует затухающим колебательным режимам в системе. .
. ,
, .
. ,
, . (4.6)
. (4.6)
 системы регулирования, передаточная функция которой примет вид:
системы регулирования, передаточная функция которой примет вид: ,
, ,
,  .
. , получим:
, получим: , откуда
, откуда  .
. реакция системы будет убывать до нуля
реакция системы будет убывать до нуля  , а ошибка будет максимальна
, а ошибка будет максимальна  .
. ,
, – невзаимосвязанные параметры настройки.
– невзаимосвязанные параметры настройки. ,
, . (4.10)
. (4.10) ,
, – время изодрома;
– время изодрома; – время предварения.
– время предварения. . Поскольку число разрядов представления этих сигналов в ЦВМ ограничено, они дискретны также и по уровню. Однако переход к дискретным сигналам, как правило, не вносит значительных изменений в расчет систем регулирования, поскольку точность представления сигналов в цифровой форме обычно гораздо больше точности измерительных устройств. Что же касается дискретизации по времени, то ввиду большой инерционности технологических процессов шаг дискретизации
. Поскольку число разрядов представления этих сигналов в ЦВМ ограничено, они дискретны также и по уровню. Однако переход к дискретным сигналам, как правило, не вносит значительных изменений в расчет систем регулирования, поскольку точность представления сигналов в цифровой форме обычно гораздо больше точности измерительных устройств. Что же касается дискретизации по времени, то ввиду большой инерционности технологических процессов шаг дискретизации 





 , (4.11)
, (4.11) .
. , что неудобно при реализации на ЭВМ. Кроме того, значение управляющего сигнала
, что неудобно при реализации на ЭВМ. Кроме того, значение управляющего сигнала  на каждом шаге вычисляется заново, что является основанием для названия данного нерекуррентного алгоритма позиционным.
на каждом шаге вычисляется заново, что является основанием для названия данного нерекуррентного алгоритма позиционным. , (4.12)
, (4.12) – поправка.
– поправка.  достаточно из уравнения (4.11) вычесть следующее:
достаточно из уравнения (4.11) вычесть следующее: .
.

 ,
,  ,
,  .
.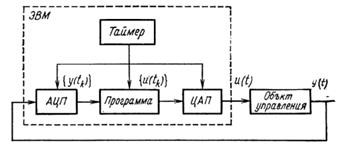
 , который преобразуется в цифровую форму аналого-цифровым преобразователем (АЦП). Преобразование осуществляется в моменты квантования
, который преобразуется в цифровую форму аналого-цифровым преобразователем (АЦП). Преобразование осуществляется в моменты квантования  . Преобразованный сигнал
. Преобразованный сигнал  интерпретируется вычислительной машиной как последовательность чисел; она производит преобразования по некоторому алгоритму и вырабатывает новую последовательность чисел
интерпретируется вычислительной машиной как последовательность чисел; она производит преобразования по некоторому алгоритму и вырабатывает новую последовательность чисел  . Полученная последовательность преобразуется в непрерывный сигнал цифро-аналоговым преобразователем (ЦАП).
. Полученная последовательность преобразуется в непрерывный сигнал цифро-аналоговым преобразователем (ЦАП).