|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электрическое подключение
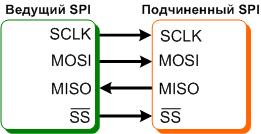
Существует три типа подключения к шине SPI, в каждом из которых участвуют четыре сигнала (их основное и альтернативные обозначения см. в табл. 1). Самое простое подключение, в котором участвуют только две микросхемы, показано на рисунке 1. Здесь, ведущий шины передает данные по линии MOSI синхронно со сгенерированным им же сигналом SCLK, а подчиненный захватывает переданные биты данных по определенным фронтам принятого сигнала синхронизации. Одновременно с этим подчиненный отправляет свою посылку данных. Представленную схему можно упростить исключением линии MISO, если используемая подчиненная ИС не предусматривает ответную передачу данных или в ней нет потребности. Одностороннюю передачу данных можно встретить у таких микросхем как ЦАП, цифровые потенциометры, программируемые усилители и драйверы. Таким образом, рассматриваемый вариант подключения подчиненной ИС требует 3 или 4 линии связи. Чтобы подчиненная ИС принимала и передавала данные, помимо наличия сигнала синхронизации, необходимо также, чтобы линия SS была переведена в низкое состояние. В противном случае, подчиненная ИС будет неактивна. Когда используется только одна внешняя ИС, может возникнуть соблазн исключения и линии SS за счет жесткой установки низкого уровня на входе выбора подчиненной микросхемы. Такое решение крайне нежелательно и может привести к сбоям или вообще невозможности передачи данных, т.к. вход выбора микросхемы служит для перевода ИС в её исходное состояние и иногда инициирует вывод первого бита данных.
Рис. 1. Простейшее подключение к шине SPI
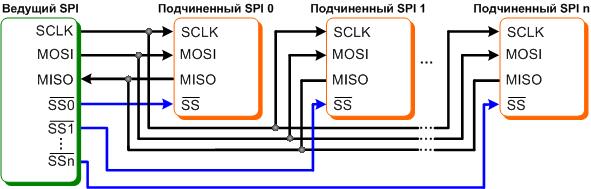
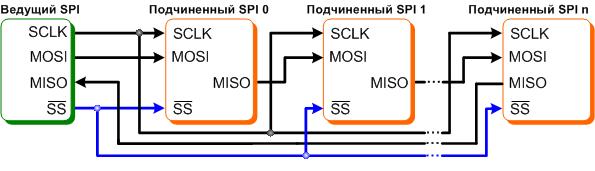
При необходимости подключения к шине SPI нескольких микросхем используется либо независимое (параллельное) подключение (рис. 2), либо каскадное (последовательное) (рис. 3). Независимое подключение более распространенное, т.к. достигается при использовании любых SPI-совместимых микросхем. Здесь, все сигналы, кроме выбора микросхем, соединены параллельно, а ведущий шины, переводом того или иного сигнала SS в низкое состояние, задает, с какой подчиненной ИС он будет обмениваться данными. Главным недостатком такого подключения является необходимость в дополнительных линиях для адресации подчиненных микросхем (общее число линий связи равно 3+n, где n-количество подчиненных микросхем). Каскадное включение избавлено от этого недостатка, т.к. здесь из нескольких микросхем образуется один большой сдвиговый регистр. Для этого выход передачи данных одной ИС соединяется со входом приема данных другой, как показано на рисунке 3. Входы выбора микросхем здесь соединены параллельно и, таким образом, общее число линий связи сохранено равным 4. Однако использование каскадного подключения возможно только в том случае, если его поддержка указана в документации на используемые микросхемы. Чтобы выяснить это, важно знать, что такое подключение по-английски называется 'daisy-chaining'.
Рис. 2. Независимое подключение к шине SPI
Рис. 3. Каскадное подключение к шине SPI
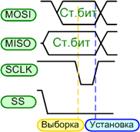
Протокол передачи
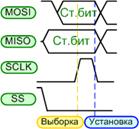
Протокол передачи по интерфейсу SPI предельно прост и, по сути, идентичен логике работы сдвигового регистра, которая заключается в выполнении операции сдвига и, соответственно, побитного ввода и вывода данных по определенным фронтам сигнала синхронизации. Установка данных при передаче и выборка при приеме всегда выполняются по противоположным фронтам синхронизации. Это необходимо для гарантирования выборки данных после надежного их установления. Если к этому учесть, что в качестве первого фронта в цикле передачи может выступать нарастающий или падающий фронт, то всего возможно четыре варианта логики работы интерфейса SPI. Эти варианты получили название режимов SPI и описываются двумя параметрами: CPOL - исходный уровень сигнала синхронизации (если CPOL=0, то линия синхронизации до начала цикла передачи и после его окончания имеет низкий уровень (т.е. первый фронт нарастающий, а последний - падающий), иначе, если CPOL=1, - высокий (т.е. первый фронт падающий, а последний - нарастающий)); CPHA - фаза синхронизации; от этого параметра зависит, в какой последовательности выполняется установка и выборка данных (если CPHA=0, то по переднему фронту в цикле синхронизации будет выполняться выборка данных, а затем, по заднему фронту, - установка данных; если же CPHA=1, то установка данных будет выполняться по переднему фронту в цикле синхронизации, а выборка - по заднему). Информация по режимам SPI обобщена в таблице 2.
Ведущая и подчиненная микросхемы, работающие в различных режимах SPI, являются несовместимыми, поэтому, перед выбором подчиненных микросхем важно уточнить, какие режимы поддерживаются ведущим шины. Аппаратные модули SPI, интегрированные в микроконтроллеры, в большинстве случаев поддерживают возможность выбора любого режима SPI и, поэтому, к ним возможно подключение любых подчиненных SPI-микросхем (относится только к независимому варианту подключения). Кроме того, протокол SPI в любом из режимов легко реализуется программно.
Cравнение с шиной I2C
Как уже упоминалось, для стыковки микросхем не меньшей популярностью пользуется 2-проводная последовательная шина I2C. Ниже можно ознакомиться с преимуществами, которая дает та или иная последовательная шина.
Производные и совместимые протоколы · MICROWIRE. Протокол MICROWIRE компании National Semiconductor полностью идентичен протоколу SPI в режиме 0 (CPOL = 0, CPHA = 0). · 3-проводной интерфейс компании Maxim Отличие этого интерфейса состоит в том, что вместо полнодуплексной передачи по двум однонаправленным линиям здесь выполняется полудуплексная передача по одной двунаправленной линии DQ. · QSPI Более высокоуровневый протокол, чем SPI, позволяющий автоматизировать передачу данных без участия ЦПУ. Кроме того, интерфейс SPI является основой для построения ряда специализированных интерфейсов, в т.ч. отладочный интерфейс JTAG и интерфейсы карт Flash-памяти, в т.ч. SD и MMC. Табл. 1. Электрические сигналы шины SPI
Табл. 2. Режимы SPI
Последовательный интерфейс RS-232
Широко используемый последовательный интерфейс синхронной и асинхронной передачи данных, определяемый стандартом EIA RS-232-C и рекомендациями V.24 CCITT. Изначально создавался для связи компьютера с терминалом. В настоящее время используется в самых различных применениях.
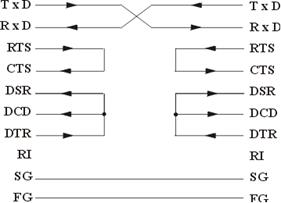
Интерфейс RS-232-C соединяет два устройства. Линия передачи первого устройства соединяется с линией приема второго и наоборот (полный дуплекс) Для управления соединенными устройствами используется программное подтверждение (введение в поток передаваемых данных соответствующих управляющих символов). Возможна организация аппаратного подтверждения путем организации дополнительных RS-232 линий для обеспечения функций определения статуса и управления.
Интерфейс RS-232C предназначен для подключения к компьютеру стандартных внешних устройств (принтера, сканера, модема, мыши и др.), а также для связи компьютеров между собой. Основными преимуществами использования RS-232C по сравнению с Centronics являются возможность передачи на значительно большие расстояния и гораздо более простой соединительный кабель. В то же время работать с ним несколько сложнее. Данные в RS-232C передаются в последовательном коде побайтно. Каждый байт обрамляется стартовым и стоповыми битами. Данные могут передаваться как в одну, так и в другую сторону (дуплексный режим).
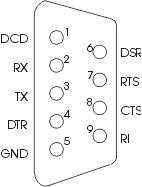
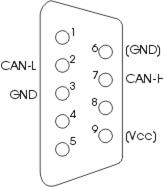
Компьютер имеет 25-контактный (DB25P) или 9-контактный (DB9P) разъем для подключения RS-232C. Назначение контактов разъема приведено в таблице.
Назначение сигналов следующее. FG - защитное заземление (экран). -TxD - данные, передаваемые компьютером в последовательном коде (логика отрицательная). -RxD - данные, принимаемые компьютером в последовательном коде (логика отрицательная). RTS - сигнал запроса передачи. Активен во все время передачи. CTS - сигнал сброса (очистки) для передачи. Активен во все время передачи. Говорит о готовности приемника. DSR - готовность данных. Используется для задания режима модема. SG - сигнальное заземление, нулевой провод. DCD - обнаружение несущей данных (детектирование принимаемого сигнала). DTR - готовность выходных данных. RI - индикатор вызова. Говорит о приеме модемом сигнала вызова по телефонной сети.
Наиболее часто используются трех- или четырехпроводная связь (для двунапрвленной передачи). Схема соединения для четырехпроводной линии связи показана на рисунке 1.1.
Для двухпроводной линии связи в случае только передачи из компьютера во внешнее устройство используются сигналы SG и TxD. Все 10 сигналов интерфейса задействуются только при соединении компьютера с модемом.
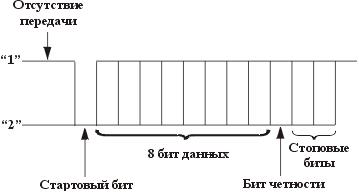
Формат передаваемых данных показан на рисунке 1.2. Собственно данные (5, 6, 7 или 8 бит) сопровождаются стартовым битом, битом четности и одним или двумя стоповыми битами. Получив стартовый бит, приемник выбирает из линии биты данных через определенные интервалы времени. Очень важно, чтобы тактовые частоты приемника и передатчика были одинаковыми, допустимое расхождение - не более 10%. Скорость передачи по RS-232C может выбираться из ряда: 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с.
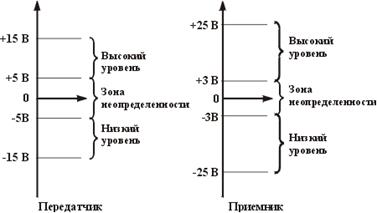
Рис.1.1 Схема 4-проводной линии связи для RS-232C Все сигналы RS-232C передаются специально выбранными уровнями, обеспечивающими высокую помехоустойчивость связи (рис.1.3.). Отметим, что данные передаются в инверсном коде (логической единице соответствует низкий уровень, логическому нулю - высокий уровень).
Для подключения произвольного УС к компьютеру через RS-232C обычно используют трех- или четырехпроводную линию связи (см. рис. 1.1), но можно задействовать и другие сигналы интерфейса.
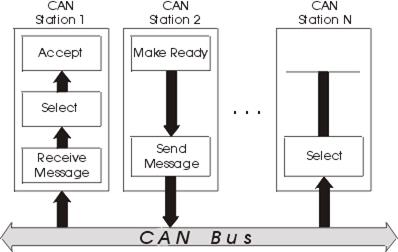
Рис.1.2 Формат данных RS-232C Обмен по RS-232C осуществляется с помощью обращений по специально выделенным для этого портам COM1 (адреса 3F8h...3FFh, прерывание IRQ4), COM2 (адреса 2F8h...2FFh, прерывание IRQ3), COM3 (адреса 3F8h...3EFh, прерывание IRQ10), COM4 (адреса 2E8h...2EFh, прерывание IRQ11). Форматы обращений по этим адресам можно найти в многочисленных описаниях микросхем контроллеров последовательного обмена UART (Universal Asynchronous Receiver/Transmitter), например, i8250, КР580ВВ51. Рис.1.3 Уровни сигналов RS-232C на передающем и принимающем концах линии связи. CAN интерфейс CAN (англ. Controller Area Network — сеть контроллеров) — стандарт промышленной сети, ориентированный прежде всего на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи — последовательный, широковещательный, пакетный.
CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время широко распространён в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности и многих других областях. Стандарт для автомобильной автоматики.
Описание стандарта
Непосредственно стандарт CAN от Bosch определяет передачу в отрыве от физического уровня — он может быть каким угодно, например, радиоканалом или оптоволокном. Но на практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары, определённым в стандарте ISO 11898. Передача ведётся кадрами, которые принимаются всеми узлами сети.
Общие сведения
Синхронная шина, с типом доступа Collision Resolution (CR), который в отличие от Collision Detect (CD) сетей (Ethernet — это CD) детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления (fieldbus). Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
Рецессивные и доминантные биты
Для абстрагирования от среды передачи спецификация CAN избегает описывать двоичные значения как «0» и «1». Вместо этого применяются термины «рецессивный» и «доминантный», при этом подразумевается, что при передаче одним узлом сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Например, при реализации физического уровня на радиоканале отсутствие сигнала означает рецессивный бит, а наличие — доминантный; тогда как в типичной реализации проводной сети рецессив бывает при наличии сигнала, а доминант, соответственно, при отсутствии. Стандарт сети требует от «физического уровня», фактически, единственного условия: чтобы доминантный бит мог подавить рецессивный, но не наоборот. Например, в оптическом волокне доминантному биту должен соответствовать «свет», а рецессивному — «темнота». В электрическом проводе может быть так: рецессивное состояние — высокое напряжение на линии (от источника с большим внутренним сопротивлением), доминантное — низкое напряжение (все узлы сети «подтягивают» линию на землю). Если линия находится в рецессивном состоянии, перевести её в доминантное может любой узел сети (включив свет в оптоволокне или закоротив высокое напряжение). Наоборот — нельзя (включить темноту нельзя).
Виды кадров Кадр данных (data frame) — передаёт данные; Кадр запроса передачи (remote frame) — служит для запроса на передачу кадра данных с тем же идентификатором; Кадр перегрузки (overload frame) — обеспечивает промежуток между кадрами данных или запроса; Кадр ошибки (error frame) — передаётся узлом, обнаружившим в сети ошибку.
Кадры данных и запроса отделяются от предыдущих кадров межкадровым промежутком.
Формат кадра Базовый формат кадра данных
Формат кадра запроса
Совпадает с кадрами данных стандартного или расширенного формата за двумя исключениями: В поле RTR рецессив вместо доминанты. Отсутствует поле данных.
Арбитраж доступа
При свободной шине любой узел может начинать передачу в любой момент. В случае одновременной передачи кадров двумя и более узлами проходит арбитраж доступа: передавая адрес источника, узел одновременно проверяет состояние шины. Если при передаче "0" бита принимается "1" — считается, что другой узел передаёт сообщение с большим приоритетом и передача откладывается до освобождения шины. Таким образом, в отличие, например, от Ethernet в CAN не происходит непроизводительной потери пропускной способности канала при коллизиях. Цена этого решения — вероятность того, что сообщения с низким приоритетом никогда не будут переданы.
Контроль ошибок
CAN имеет несколько механизмов контроля и предотвращения ошибок: Контроль передачи: при передаче битовые уровни в сети сравниваются с передаваемыми битами. Дополняющие биты (bit stuffing): после передачи пяти одинаковых битов подряд автоматически передаётся бит противоположного значения. Таким образом, кодируются все поля кадров данных или запроса, кроме разграничителя контрольной суммы, промежутка подтверждения и EOF. Контрольная сумма: передатчик вычисляет её и добавляет в передаваемый кадр, приёмник считает контрольную сумму принимаемого кадра в реальном времени (одновременно с передатчиком), сравнивает с суммой в самом кадре и в случае совпадения передаёт доминантный бит в промежутке подтверждения. Контроль значений полей при приёме.
Разработчики оценивают вероятность невыявления ошибки передачи как 4,7×10-11.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-05-08; Просмотров: 300; Нарушение авторского права страницы