
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Решение систем линейных уравнений
Метод Гаусса Методы решения систем линейных алгебраических уравнений можно разделить на точные и приближенные. Метод решения задачи относят к классу точных, если в предположении отсутствия округлений с его помощью можно найти решение в результате конечного числа арифметических и логических операций. Метод Гаусса относится к точным методам решения систем линейных уравнений вида Прямой ход метода Гаусса заключается в последовательном исключении неизвестных из уравнений системы. Обозначим через
В результате получаем систему, характеризуемую треугольной матрицей, на главной диагонали которой стоят единицы. Полученная система уравнений имеет вид:
Нахождение неизвестных при обратном ходе метода осуществляется по формуле:
На практике при рассмотрении метода Гаусса для того, чтобы избежать деления на нуль, применяют модифицированный метод Гаусса с выбором ведущего элемента. При этом при прямом ходе метода Гаусса перед началом каждого шага переставляют строки таким образом, чтобы первый ненулевой элемент верхней строки был наибольшим по абсолютной величине в своем столбце. Одним из преимуществ применения метода Гаусса является то, что системы с одинаковой левой, но различными правыми частями можно решать одновременно. Для этого прямой ход метода применяется к матрице Метод Гаусса можно применять для нахождения определителя матрицы системы. В этом случае используется только прямой ход метода, и определитель матрицы будет находиться по формуле:
где для нахождения обратной матрицы прямой ход метода Гаусса применяется к матрице Основным недостатком метода Гаусса является большое число выполняемых в процессе решения арифметических операций -
3.2. Метод простых итераций Точные методы решения линейных систем применяются для систем относительно небольшой размерности (до 103). Для решения систем больших размерностей применяются итерационные методы, в частности, метод простых итераций. Метод состоит в том, что система уравнений
Теорема 3.1. Пусть имеется система линейных уравнений вида
В указанных условиях решение системы существует и единственно; при этом последовательные приближения
Метод Зейделя Пусть дана система уравнений Поделим каждое i -тое уравнение на aii:
В правой части каждого из уравнений оставим только i–е неизвестные:
Тогда система запишется в виде x = Cx + d, где
Выберем начальное приближение
где Данный метод похож на метод простых итераций (
Для сходимости метода Зейделя достаточно выполнение условия:
Решение нелинейных уравнений и систем Метод бисекций Пусть задана непрерывная функция Первым этапом решения является локализация корней, которая заключается в определении отрезка [а, b], на котором функция принимает значения разных знаков, т.е. Пусть отрезок [a, b] определен. Итерационный метод бисекций состоит в построении вложенных последовательности отрезков Опишем один шаг итераций. Пусть на (п-1)-м шаге найден отрезок
Если точность нахождения корня e задана, то итерационный процесс продолжается до тех пор, пока длина отрезка станет не меньше 2e. Тогда координата середины отрезка и есть значение корня с требуемой точностью. Метод бисекций – надежный способ отыскания простых корней функции. Он сходится для любых непрерывных, в том числе и недифференцируемых функций, однако скорость сходимости невелика. Для достижения заданной точности e необходимо совершить N итераций, где
Метод неприменим для отыскания кратных корней четного порядка. В случае отыскания корней нечетной кратности он менее точен. Метод итераций Рассмотрим уравнение вида Функция
Теорема 4.1. Пусть функция Тогда на этом отрезке функция имеет единственный корень, который может быть найден как предел последовательности приближений:
где x 0 - начальное приближение,
|
Последнее изменение этой страницы: 2019-10-04; Просмотров: 170; Нарушение авторского права страницы
 , где Х – вектор-столбец неизвестных
, где Х – вектор-столбец неизвестных  ,
,  - матрица коэффициентов, В – вектор-столбец свободных членов
- матрица коэффициентов, В – вектор-столбец свободных членов  . Как известно из курса линейной алгебры, метод Гаусса заключается в приведении матрицы системы к треугольному виду (прямой ход метода) и затем в последовательном нахождении неизвестных
. Как известно из курса линейной алгебры, метод Гаусса заключается в приведении матрицы системы к треугольному виду (прямой ход метода) и затем в последовательном нахождении неизвестных  (обратный ход).
(обратный ход). - коэффициенты системы, а через
- коэффициенты системы, а через  - правые части уравнений, полученные на k-м шаге (
- правые части уравнений, полученные на k-м шаге (  ). Преобразование коэффициентов осуществляется следующим образом:
). Преобразование коэффициентов осуществляется следующим образом:  .
.
 .
. .
. ,
,  - сумма индексов переставлявшихся строк.
- сумма индексов переставлявшихся строк. , где А – исходная матрица, Е – единичная матрица. Преобразованиями, аналогичными указанным выше, ее можно привести к виду
, где А – исходная матрица, Е – единичная матрица. Преобразованиями, аналогичными указанным выше, ее можно привести к виду  .
. .
. преобразуется к виду
преобразуется к виду  , и ее решение находится как предел последовательности
, и ее решение находится как предел последовательности
 - произвольный вектор (начальное приближение). Построим последовательность векторов
- произвольный вектор (начальное приближение). Построим последовательность векторов сходятся к решению x* со скоростью геометрической прогрессии.
сходятся к решению x* со скоростью геометрической прогрессии. ,
,  ).
).


 ,
,  ,
, 
 . Каждое следующее приближение вычисляется по следующим формулам:
. Каждое следующее приближение вычисляется по следующим формулам:  ,
,  - i-я компонента k-го приближения.
- i-я компонента k-го приближения.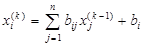 ), однако скорость сходимости метода Зейделя выше, поскольку в процессе вычислений используются уже найденные компоненты более точного решения.
), однако скорость сходимости метода Зейделя выше, поскольку в процессе вычислений используются уже найденные компоненты более точного решения.
 , и требуется найти корни уравнения
, и требуется найти корни уравнения  .
.  . Тогда по теореме Больцано-Коши внутри отрезка существует такая точка c, что
. Тогда по теореме Больцано-Коши внутри отрезка существует такая точка c, что  . Определение числа корней функции и выделение содержащих их отрезков осуществляется с помощью исследования графика функции.
. Определение числа корней функции и выделение содержащих их отрезков осуществляется с помощью исследования графика функции.  , на концах которых функция принимает значения разных знаков. Каждый последующий отрезок получают делением пополам предыдущего. Процесс построения последовательности отрезков позволяет найти корень функции
, на концах которых функция принимает значения разных знаков. Каждый последующий отрезок получают делением пополам предыдущего. Процесс построения последовательности отрезков позволяет найти корень функции  такой, что
такой, что  . Разделим его пополам точкой
. Разделим его пополам точкой  и вычислим значение
и вычислим значение  . Если
. Если  , то из двух половин отрезка выберем ту, на концах которой функция принимает разные знаки, т.к. корень находится в этой половине:
, то из двух половин отрезка выберем ту, на концах которой функция принимает разные знаки, т.к. корень находится в этой половине:  , если
, если  ,
,  , если
, если  .
. .
. .
. удовлетворяет условию Липшица на отрезке [a; b] с константой
удовлетворяет условию Липшица на отрезке [a; b] с константой  , если справедливо следующее неравенство:
, если справедливо следующее неравенство: 
 .
. ,
,  .
.