
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАЗДЕЛ 1 ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ. ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕСтр 1 из 16Следующая ⇒
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» СУДОМЕХАНИЧЕСКИЙ ТЕХНИКУМ Цикловая комиссия физико-математических дисциплин Уколова Ю.В.
ФИЗИКА Конспект лекций для студентов специальности 22.02.06 «Сварочное производство»
профиля: технического очной форм обучения Часть 1
Керчь, 2016 г. Составитель: Уколова Юлия Валериевна, преподаватель первой категории СМТ ФГБОУ ВО«КГМТУ» ___________
Рецензент: Уколов Алексей Иванович, канд. физ. – мат. наук, доцент кафедры математики, физики и информатики ФГБОУ ВО «КГМТУ» _________
Методические указания рассмотрены и одобрены на заседании цикловой комиссии физико-математических дисциплин Судомеханического техникума ФГБОУ ВО «КГМТУ» Протокол № ___ от _____________ 2016г. Председатель ЦК _________________ Ю.В.Уколова Методические указания утверждены на заседании учебно-методического совета Судомеханического техникума ФГБОУ ВО «КГМТУ» Протокол № ___ от _____________2016г.
СОДЕРЖАНИЕ | |||||
| ВВЕДЕНИЕ | 4 | ||||
| ТЕМАТИЧЕСКИЙ ПЛАН ДИСЦИПЛИНЫ «ФИЗИКА». | 5 | ||||
| РАЗДЕЛ 1. ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ Тема 1.1Кинематика движения | 6 | ||||
| Тема 1.2Динамика движения | 12 | ||||
| Тема 1.3Динамика вращательного движения | 22 | ||||
| Тема 1.4Элементы статики | 28 | ||||
| РАЗДЕЛ 2 МОЛЕКУЛЯРНАЯ ФИЗИКА И ТЕРМОДИНАМИКА Тема 2.1Молекулярная физика | 40 | ||||
| Тема 2.2Термодинамика. | 53 | ||||
| CПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ | 67 | ||||
ВВЕДЕНИЕ
Повышение уровня профессиональной подготовки выпускников средних специальных учебных заведений, их готовность к производительному труду базируется на прочных знаниях общеобразовательных предметов. Именно поэтому глубокое знание физики необходимо для изучения специальных дисциплин.
Основной целью изучения дисциплины «Физика» для будущих специалистов является как закрепление теоретических знаний, полученных в процессе освоения школьной программы, так и получение новых теоретических знаний для решения практических проблем, связанных, прежде всего, с будущей профессиональной деятельностью.
В результате освоения дисциплины обучающийся должен уметь:
© рассчитывать и измерять основные параметры простых электрических и магнитных цепей;
знать:
© законы равновесия и перемещения тел;
обладать общими компетенциями, включающими в себя способность:
ОК1.Понимать сущность и социальную значимость своей будущей профессии, проявлять к ней устойчивый интерес.
ОК3.Принимать решения в стандартных и нестандартных ситуациях и нести за них ответственность.
ОК4.Осуществлять поиск и использование информации, необходимой для эффективного выполнения профессиональных задач, профессионального и личностного развития.
ОК5.Использовать информационно-коммуникационные технологии в профессиональной деятельности.
ОК8.Самостоятельно определять задачи профессионального и личностного развития, заниматься самообразованием, осознанно планировать повышение квалификации.
ОК9.Ориентироваться в условиях частой смены технологий в профессиональной деятельности.
Теоретическое пособие по дисциплине «Физика» содержит ответы на все вопросы тематического плана дисциплины и рассчитан на 35 часов самостоятельной работы, а также 70 часов аудиторных занятий. В конце каждой темы даются вопросы для самопроверки студентов, а также список использованной и рекомендуемой литературы.
ТЕМАТИЧЕСКИЙ ПЛАН ДИСЦИПЛИНЫ «ФИЗИКА»
для студентов очной формы обучения,
обучающихся по специальности 22.02.06 «Сварочное производство».
РАЗДЕЛ 1 ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ
Тема 1.1 Кинематика движения. Механика. Система отсчета. Материальная точка, абсолютно твердое тело. Основная задача механики. Виды движения. Траектория. Радиус-вектор. Вектор перемещения. Путь. Скорость. Ускорение. Виды движения. Кинематика вращательного движения
Тема 1.2 Динамика движения. Основные понятия и законы динамики. Импульс. Закон сохранения импульса. Центр масс. Энергия. Работа. Мощность. Кинетическая и потенциальная энергия. Закон сохранения механической энергии. Виды ударов
Тема 1.3 Динамика вращательного движения Момент инерции. Теорема Штейнера. Кинетическая энергия вращения. Момент силы и момент импульса.
Тема 1.4 Элементы статики. Равновесие тел при отсутствии вращения. Условие равновесия тел, имеющего ось вращения. Цент тяжести. Виды равновесия. Устойчивость равновесия тела.
РАЗДЕЛ 2 МОЛЕКУЛЯРНАЯ ФИЗИКА И ТЕРМОДИНАМИКА
Тема 2.1 Молекулярная физика. Основы молекулярно-кинетической теории (МКТ) Идеальный газ. Основное уравнение МКТ. Уравнение Менделеева–Клапейрона. Изопроцессы. Газовые законы. Закон Дальтона. Распределения Максвелла и Больцмана
Элементы молекулярной кинетики. Явления переноса Строение реальных веществ. Газ Ван-дер-Ваальса. механика жидкостей
Тема 2.2Термодинамика. Степени свободы. Внутренняя энергия идеального газа (ИГ), работа, количество теплоты. Первое начало термодинамики. Теплоемкость. Применение первого начала термодинамики к изопроцессам. Адиабатический и политропный процессы Круговой процесс. Цикл Карно. Энтропия. Второе начало термодинамики.
РАЗДЕЛ 3 ОСНОВЫ ЭЛЕКТРОДИНАМИКИ
Тема 3.1 Электростатика. Электрический заряд. Закон Кулона. Напряженность и поток электростатического поля. Принцип суперпозиции электростатических полей. Потенциал. Разность потенциалов. Связь между напряженностью и потенциалом. Эквипотенциальные поверхности. Диэлектрики и проводники в электрическом поле. Конденсаторы. Устройство, назначение. Соединение конденсаторов в батарею. Энергия электрического поля.
Тема 3.2 Постоянный электрический ток. Постоянный электрический ток, сила и плотность тока. Электронная теория проводимости металлов. Закон Ома. Работа электрического тока. Сопротивление проводников. Сверхпроводимость. Электродвижущая сила. Разветвленные цепи; правила Кирхгофа.
Тема3.3 Термоэлектронные явления. Работа выхода электронов из металла. Контактная разность потенциалов. Термоэлектрические явления.
Тема3.4 Магнитное поле. Магнитное поле тока. Закон Био- Савара-Лапласа. Магнитная индукция Магнитный поток. Силы Лоренца и Ампера.
Тема3.5 Электромагнетизм. Электромагнитная индукция; законы Фарадея и Ленца. Явление самоиндукции. Энергия магнитного поля. Вихревые токи.
РАЗДЕЛ 1 ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ
Тема 1.1 Кинематика движения
План
Механика. Система отсчета. Материальная точка, абсолютно твердое тело. Основная задача механики.
Траектория. Радиус-вектор. Вектор перемещения. Путь.
Скорость. Средний вектор скорости. Средний модуль скорости. Мгновенная скорость. Модуль мгновенной скорости.
Ускорение. Среднее ускорение. Мгновенное ускорение. Нормальное, тангенциальное, полное ускорения.
Кинематика вращательного движения
Рисунок 1.1 – К определению радиус – вектора
Путь ( S) – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике.
Вектор перемещения(  ) (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.2). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
) (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.2). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
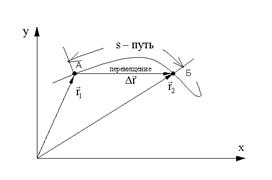
Рисунок 1.2 – К определению вектора перемещения
Рисунок 1.3 – К определению вектора мгновенной скорости
Следовательно путь,
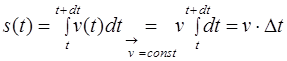 . (1.7)
. (1.7)
Рисунок 1.4 – Составляющие скорости
Тангенциальная составляющая ускорения 
 (1.10)
(1.10)
т. е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Вторая составляющая ускорения, равная
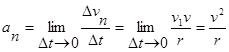 (1.11)
(1.11)
 - называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
- называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис.1.5):
 (1.12)
(1.12)

Рисунок 1.5 – К определению нормального, тангенциального и полного ускорения.
Рисунок 1.8 – Направление векторов угловой скорости и углового перемещения
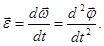
При неравномерном вращении используется векторная величина углового ускорения  или [c-2], по величине равная
или [c-2], по величине равная
 (1.15)
(1.15)
Вектор  направлен вдоль оси вращения в сторону вектора приращения угловой скорости ( при ускоренном вращении вектор сонаправлен вектору
направлен вдоль оси вращения в сторону вектора приращения угловой скорости ( при ускоренном вращении вектор сонаправлен вектору  , при замедленном – противонаправлен ему).
, при замедленном – противонаправлен ему).
Угловая скорость при равнопеременном вращении можно найти из выражения, очень похожего для формулы прямолинейного равнопеременного движения
wt = w0 ±et. (1.16
Среднюю угловую скорость при равнопеременном вращении можно найти из выражения, аналогичного выражению средней скорости при прямолинейном равнопеременном движении:
 (1.17)
(1.17)
Таким образом, уравнение движения при вращении может быть представлено в виде:
 (1.18)
(1.18)
Угловой путь j [рад] может быть найден из выражений, «симметричных» полученным при описании прямолинейного движения:
Dj = w× Dt - равномерное вращение (w = const, e = 0);
 - равнопеременное вращение (w = wо±et, e = const);
- равнопеременное вращение (w = wо±et, e = const);
 - неравномерное вращение (w = w(t) – функция, описывающая зависимость угловой скорости от времени.
- неравномерное вращение (w = w(t) – функция, описывающая зависимость угловой скорости от времени.
Связь угловых и линейных характеристик движения.
Линейная скорость точки связана с угловой скоростью и радиусом траектории соотношением:
 (1.19)
(1.19)
или векторной
 . (1.20)
. (1.20)
Согласно формулам (  ) и
) и
(  ), получают:
), получают:
 (1.21)
(1.21)
 . (1.22)
. (1.22)
Вопросы и задания для самоконтроля
1. Что изучает механика?
2. Что изучает кинематика?
3. Что называют системой отсчета?
4. Какое движение называют поступательным?
5. При каких условиях тело можно считать материальной точкой?
6. Каков физический смысл мгновенной скорости и мгновенного ускорения?
7. Какова связь между тангенциальным, нормальным и полным ускорением?
8. Запишите формулы, связывающие линейные и угловые величины.
Тема 1.2 Динамика движения
План
Основные понятия и законы динамики
Основные понятия и законы динамики
Явление сохранения скорости движения тела при отсутствии внешних воздействий называется инерцией.
Закон инерции: всякое тело находится в покое или движется равномерно и прямолинейно, если на него не действуют другие тела.
Закон инерции называется первым законом Ньютона или первым законом механики.
I закон Ньютона: если внешние силы отсутствуют или их действие на материальную точку скомпенсировано, то эта точка сохраняет состояние покоя равномерного прямолинейного движения до тех пор, пока внешнее воздействие не выведет ее из этого состояния.
Свойство тел сохранять свое состояние покоя или движения с постоянной скоростью называется инертностью тел.
Масса(m) – это физическая величина, характеризующая меру инертности тела, меру гравитационного взаимодействия и связанная с энергией тела и количеством вещества. Единица массы – килограмм (кг).
Системы отсчета, в которых выполняется закон инерции, называются инерциальными системами отсчета.
Сила( F)– это физическая величина, характеризующая взаимодействие, которое приводит к деформации или ускорению тела.
За единицу силы в Международной системе принимается сила, которая телу массой 1 кг сообщает ускорение 1 м/с2. Эта единица называется ньютон (Н)
Второй закон Ньютона: " Изменение количества движения пропорционально приложенной движущей силе и происходит по направлению той прямой, по которой эта сила действует".
II закон Ньютона определяет характер изменения движения тела под действием внешней силы. Он утверждает, что если
 , то
, то  , (1.23)
, (1.23)
где  – равнодействующая всех сил.
– равнодействующая всех сил.
В системе СИ:
 . (1.24)
. (1.24)
Третий закон Ньютона: ”Действию всегда есть равное и противоположное противодействие, иначе взаимодействия двух тел друг на друга между собой равны и направлены в противоположные стороны”
 . (1.25)
. (1.25)
Силы в природе.
Все известные нам к настоящему времени силы можно разделить на четыре типа: 1) гравитационные, 2) электромагнитные, 3) ядерные, 4) слабые.
Гравитационные силы действуют между телами, обладающими массой. Они были открыты Ньютоном при изучении движения небесных тел. Между любыми двумя материальными точками действует гравитационная сила равная по величине
 , (1.26)
, (1.26)
где G – гравитационная постоянная, m1, m2 – массы тел, r – расстояние между ними.
Электромагнитные силы – это силы, действующие на заряды и токи, и их источниками являются заряды и токи. Например, между двумя точечными электрическими зарядами q1 и q2 и, расположенными на расстоянии r друг от друга, действует сила Кулона, равная по величине
 (1.27)
(1.27)
Здесь k – коэффициент пропорциональности, зависящий от системы единиц измерения. Это частный простейший вид электромагнитных сил. Взаимодействия между атомами, молекулярные силы и силы, удерживающие электроны около атомного ядра, – все это силы электромагнитного происхождения. Поскольку межмолекулярные силы являются силами электрического происхождения, то такое же происхождение имеют поверхностные силы, а также любые силы сцепления между телами. К электромагнитным силам сводятся и силы трения. Силы упругости, проявляющиеся, например, при сжатии металлической пружины, являются результатом проявления межатомных и межмолекулярных взаимодействий. Поэтому и они также имеют электромагнитную природу
Ядерные силы действуют между частицами в атомных ядрах и определяю свойства ядер.
Слабые взаимодействия вызывают взаимные превращения элементарных частиц, определяют радиоактивный распад ядер, реакции термоядерного синтеза.
Силу, с которой Земля действует на тело, называют силой тяжести:
 (1.28)
(1.28)
Физическая величина  - ускорение свободного падения, оно постоянно для всех тел.
- ускорение свободного падения, оно постоянно для всех тел.
Весом тела (Р) называют силу, с которой это тело действует на опору или подвес
(рис 1.9)
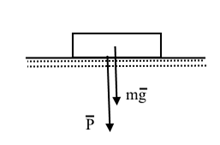
Рисунок 1.9 – К определению веса тела
Если тело движется равномерно или находится в состоянии покоя, то
 (1.29)
(1.29)
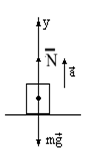
Если тело движется с ускорением вертикально вверх, то
 , (1.30)
, (1.30)
где а – ускорение тела. В случае равенства a =g, Р=2mg, тело испытывает перегрузку.
При движении тела с ускорением вертикально вниз
 , (1.31)
, (1.31)
при a =g, Р=0, тело находится в невесомости.
Силы, возникающие в результате деформации тел, называются силами упругости( см. рис 1.10).Силы упругости являются электромагнитными силами
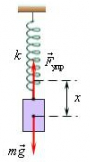
Рисунок 1.10 – К определению силы упругости
Примеры силы упругости:  - сила натяжения нити( рис 1.11 (а)),
- сила натяжения нити( рис 1.11 (а)),  - сила реакции опоры( рис 1.11(б)),
- сила реакции опоры( рис 1.11(б)),  - вес тела.
- вес тела.
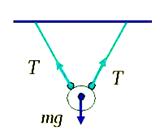
(а) (б)
Рисунок 1.11 – К определению силы натяжения нити и силы реакции опоры
Закон Гука: при малых деформациях сила упругости Fупр прямо пропорциональна относительному удлинению х:
 (1.32)
(1.32)
Коэффициент k в формуле закона Гука называется жесткостью и выражается в ньютонах на метр (Н/м). Знак «минус» указывает на то, что сила упругости направлена противоположно деформации тела.
Силу, возникающую при соприкосновении тел и направленную вдоль поверхности соприкосновения, называют силой трения.
Силу трения, действующую между телами, неподвижными относительно друг друга, называют силой трения покоя
Силу трения, возникающую при скольжении одного тела по поверхности другого, называют силой трения скольжения (см рис 1.12).
 , (1.33)
, (1.33)
где μ – коэффициент трения, - сила реакции опоры.

Рисунок 1.12 – К определению силы трения
Силу трения, возникающую при качении одного тела по поверхности другого, называют силой трения качения.
Сложение сил.
Сила  оказывающая на тело такое же действие, как две одновременно действующие на это тело силы, называется равнодействующей сил
оказывающая на тело такое же действие, как две одновременно действующие на это тело силы, называется равнодействующей сил  и
и 
Рисунок 1.13 – К определению центра масс
Центр масс сложного тела не обязательно лежит внутри тела (системы тел), но он всегда находится внутри многогранника, получаемого при соединении крайних точек тела (системы).
Если тело состоит, например, из двух частей (рис. 1.13), то центр масс лежит на линии, соединяющей центры масс его частей, т.е. можно найти центр масс 1-й и 2-й частей, а затем определить положение центра масс системы на этой линии как для двух материальных точек, находящихся в точках С1 и С2 и обладающих всей массой этих частей m1 и m2 соответственно.
Скорость центра масс равна:
 . (1.43)
. (1.43)
Тогда, записывая II закон Ньютона для системы тел аналогично формуле
(1.36), получаем, что изменение импульса системы равно:
 . (1.44)
. (1.44)
Таким образом, центр масс замкнутой системы либо покоится, либо движется прямолинейно и равномерно. Если центр масс покоится, то система либо полностью покоится, либо участвует во вращательном движении относительно оси, проходящей через ее центр масс.
Рисунок 1.14 – К определению работы
Если  , то
, то
 . (1.47)
. (1.47)
Сила называется потенциальной (консервативной), если ее работа зависит только от начального и конечного положений тела и не зависит от формы ее траектории. Для таких сил интеграл по замкнутому контуру L равен
 . (1.48)
. (1.48)
Для диссипативных сил работа зависит от формы траектории при перемещении тела (сила трения).
Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности  . За время dt сила
. За время dt сила  совершает работу(
совершает работу(  ) и мощность силы в данный момент (мгновенная мощность) равна
) и мощность силы в данный момент (мгновенная мощность) равна
 (1.49)
(1.49)
Единицы измерения: [A]=Дж; [N]=Ватт – Вт.
Кинетическая энергия (КЭ) системы – это энергия механического движения этой системы. Сила , действующая на покоящееся тело и вызывающая его движение, совершает работу; энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы на пути, который тело проходит от нулевой скорости до скорости  , идет на увеличение КЭ тела Т:
, идет на увеличение КЭ тела Т:
 .(1.50)
.(1.50)
Кинетическая энергия Т является функцией состояния движения тела. Поскольку скорость  зависит от выбора СО, КЭ тела в различных инерциальных системах отсчета (ИСО) имеет разные значения, определяемые согласно теореме Кёнига: КЭ системы материальных точек равна сумме КЭ всей массы системы, мысленно сосредоточенной в ее центре масс и движущейся вместе с ним, и КЭ той же системы в ее относительном движении по отношению к поступательно движущейся системе координат с началом в центре масс.
зависит от выбора СО, КЭ тела в различных инерциальных системах отсчета (ИСО) имеет разные значения, определяемые согласно теореме Кёнига: КЭ системы материальных точек равна сумме КЭ всей массы системы, мысленно сосредоточенной в ее центре масс и движущейся вместе с ним, и КЭ той же системы в ее относительном движении по отношению к поступательно движущейся системе координат с началом в центре масс.
Потенциальная энергия (ПЭ) – это механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Телу присуща потенциальная энергия U, если оно находится в поле потенциальных (консервативных) сил. Работа консервативных сил на элементарном перемещении равна приращению энергии U, взятому со знаком «–», так как работа совершается за счет убыли потенциальной энергии (зная U=f(r), можно определить модуль и направление силы F):
 , (1.51)
, (1.51)
тогда
 , (1.52)
, (1.52)
т.е. энергия U определяется с точностью до некоторой произвольной постоянной, но это не влияет на физические законы, так как в них, обычно, входят или разность энергий, или их производные по координатам. Нулевой уровень ПЭ выбирается произвольно из соображений удобства, поэтому может быть как больше, так и меньше нуля.
Конкретный вид функции U=f(r) зависит от характера силового поля. Так, тело, находящееся на высоте h< < RЗемли от поверхности земли в поле сил тяготения, обладает потенциальной энергией:
 (1.53)
(1.53)
Аналогично, при упругих деформациях, потенциальная энергия упруго–деформированного тела
 . (1.54)
. (1.54)
Потенциальная энергия системы является функцией ее состояния. Она зависит только от взаимного расположения тел (конфигурации) системы и от ее положения по отношению к внешним телам.
Рисунок 1.15 – Абсолютно упругий удар шаров
Абсолютно упругий удар (АУУ). Пусть  и
и  – скорости тел до, а
– скорости тел до, а  и
и  – после удара (рис. 1.15). В случае, если скорость направлена навстречу , в формулах ниже учитывают, что проекция скорости будет равна
– после удара (рис. 1.15). В случае, если скорость направлена навстречу , в формулах ниже учитывают, что проекция скорости будет равна  и все рассуждения остаются верными.
и все рассуждения остаются верными.
Для АУУ выполняются законы сохранения импульса (так как импульс – векторная величина, то записан в проекции на ось Ох) и энергии:
 . (1.57)
. (1.57)
 , (1.58)
, (1.58)
При анализе упругих столкновений удобно один из шаров представлять покоящимся (относительно шара m2 скорость  ).
).
Рассмотрим частный случай: АУУ – прямой центральный (лобовой) удар при n2=0. Тогда  и
и  :
:
а) m1=m2, тогда  (как бы «передача скорости»);
(как бы «передача скорости»);
б) m1> m2, тогда  (оба мяча движутся в направлении скорости первого мяча до удара);
(оба мяча движутся в направлении скорости первого мяча до удара);
в) m1< m2, тогда  (первый мяч отскочит от второго);
(первый мяч отскочит от второго);
г) m1< < m2, тогда  (мячик отскочит от стены, см. рис. 1.16,
(мячик отскочит от стены, см. рис. 1.16,  )
)
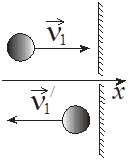
Рисунок 1.16 – Прямой центральный удар
Абсолютно неупругий удар (АНУ). В этом случае тела объединяются и двигаются как одно целое. Потеря механической энергии при неупругом ударе происходит потому, что в этом случае помимо сил, пропорциональных деформациям, действуют силы, пропорциональные скорости – подобные силам сопротивления. При АНУ выполняется закон сохранения импульса и рассеивается часть КЭ DT:
 ,
,
 . (1.59)
. (1.59)
Тогда
 (1.60)
(1.60)
и
 . (1.61)
. (1.61)
Вопросы и задания для самоконтроля
1. В чем состоит явление инерции?
2. При каких условиях тело движется с постоянной скоростью?
3. Дайте определение силы.
4. Как складываются силы, действующие на тело?
5. Какое утверждение содержится в первом законе Ньютона?
6. Можно ли утверждать, что первый закон Ньютона является следствием второго?
7. При каких условиях точка движется равномерно и прямолинейно?
8. Сформулируйте третий закон Ньютона.
9. Назовите типы взаимодействий, существующих в природе.
10. Справедлив ли закон всемирного тяготения для тел произвольной формы?
11. Что называется весом тела?
12. Что называется состоянием невесомости?
13. При каких условиях появляются силы упругости?
14. При каких условиях выполняется закон Гука?
15. При каких условиях появляются силы трения?
16. Как определяется импульс тела?
17. Сформулируйте закон сохранения импульса?
18. Дайте определение работы в механике.
19. Какие виды механической энергии вы знаете?
План
Рисунок 1.17 – К определению теоремы Штейнера
Найдем связь между моментами инерции тела относительно двух неподвижных параллельных осей. Пусть оси перпендикулярны плоскости рисунка и проходят соответственно через точки О и А (все точки находятся в плоскости рис. 1.17).
Теорема Штейнера: момент инерции тела относительно какой-либо оси равен моменту инерции его относительно параллельной оси, проходящей через его центр масс С, сложенному с величиной ma2, где а – расстояние между осями, m – масса тела.:
 , (1.65)
, (1.65)
Далее вычисляют моменты инерции некоторых тел правильной формы.
1. Тонкий однородный стержень (длина l, масса m, Þ линейная плотность t=m/l=const):
а) ось вращения ОО/ проходит перпендикулярно стержню через его центр масс С
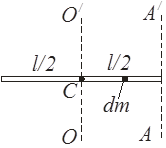
Рисунок 1.18 – Тонкий однородный стержень
В силу симметрии получают:
 ; (1.66)
; (1.66)
б) ось вращения АА/ проходит перпендикулярно стержню через его конец. По теореме Штейнера (1.63) получают:
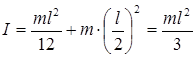 . (1.67)
. (1.67)
2. Однородное тонкое круглое кольцо (масса m, радиус R, ). В силу симметрии очевидно (рис. 1.19), что
 , (1.68)
, (1.68)
в силу симметрии
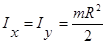 . (1.69)
. (1.69)
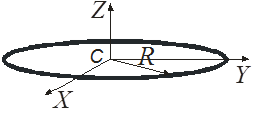
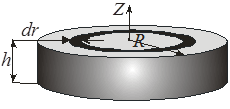
Рисунок 1.19 Рисунок 1.20
Рисунок 1.21 – Полый шар с бесконечно тонкими однородными стенками
4. Полый шар с бесконечно тонкими однородными стенками (сфера массы m, радиуса R). Расположим начало координат (пересечение) трех взаимно перпендикулярных осей в центре сферы, в ее центре масс С (рис. 1.21), тогда в силу симметрии и формулы (1.71):
 . (1.72)
. (1.72)
5. Сплошной однородный шар (масса m, радиус R, объем V). Расположим начало координат (пересечение) трех взаимно перпендикулярных осей в центре шара и рассмотрим шар как совокупность тонких сфер. Момент инерции такого тонкого сферического слоя по формуле (1.68) будет иметь вид:
 ,
,
тогда момент инерции шара:
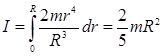 . (1.73)
. (1.73)
В некоторых задачах используется понятие момента инерции относительно точки. Поскольку ориентация различных элементов тела (ТТ) относительно его произвольной точки должна задаваться тремя координатами, то его инертность должна характеризоваться набором 9 чисел – тензором инерции (в математике используются скаляры – одно число, векторы – тройки чисел и тензоры – запись их представляет собой матрицу III порядка).
Если работа силы идет только на вращение тела, т.е. на увеличение кинетической энергии (КЭ) вращения, то
 .
.
При увеличении скорости вращения от 0 до w КЭ вращения равна
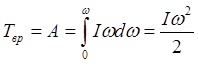 . (1.74)
. (1.74)
Рисунок 1.22 - К определению момента силы и момента импульса
Последнее изменение этой страницы: 2020-02-16; Просмотров: 133; Нарушение авторского права страницы