|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Самонастраивающееся управление
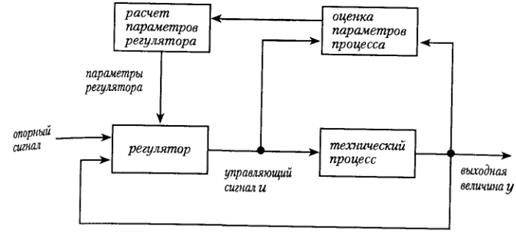
Самонастраивающееся управление относится к управлению с неизвестным изменением параметров. Динамика многих процессов такова, что их параметры неизвестны, хотя и постоянны во времени. В других случаях параметры изменяются во времени очень медленно. Трубопроводные системы постепенно засоряются, и это влияет на расход и теплоотдачу. При управлении воздушно-топливной смесью в двигателе внутреннего сгорания чувствительность датчика меняется со временем непредсказуемым образом. В биологических ферментаторах или установках очистки сточных вод могут появиться новые организмы, изменяющие характер потребления кислорода. Простые системы с динамикой низкого порядка легко управляются, если их параметры известны и постоянны. В большинстве подобных случаев достаточно использовать ПИД-регуляторы. Однако если параметры системы медленно изменяются во времени, качество управления при фиксированной настройке регулятора будет степенно снижаться. Одно из решений этой проблемы - автоматическая настройка параметров ПИД-регулятора с помощью так называемого автонастройщика (auto-tuner). Первоначальная настройка осуществляется оператором. Затем автонастройщик вносит небольшие возмущения в процесс для определения его динамики. Далее регулятор вычисляет параметры ПИД-управления по реакции системы, которые запоминаются и используются до тех пор, пока оператор не инициирует проведение новой настройки. Следующий логический шаг - это непрерывное обновление параметров регулятора. Процедура непрерывной автоматической настройки параметров регулятора называется адаптивным управлением (adaptive control). Адаптивные регуляторы включают в себя две различные подсистемы, одну для оценки (estimation) и вторую для управления (control), как показано на рис. 5.5. Оценивающая часть регулятора непрерывно измеряет входной и выходной сигналы процесса. По этим данным алгоритм настройки вычисляет и обновляет параметры регулятора. В сущности, aдаптивный регулятор состоит из двух контуров управления - быстрого контура для непосредственного управления и более медленного, осуществляющего настройку параметров.
Рис 5.5. Основные элементы адаптивного регулятора
Существует несколько вариантов этой общей схемы, например выход процедуры оценки может непосредственно поступать на вход регулятора, минуя процедуру пересчета его параметров. Даже если основные алгоритмы достаточно просты с точки зрения программирования, адаптивное управление должно быть ограничено целым набором правил безопасности, позволяющих предотвратить его неправильное применение. Распространено совершенно необоснованное убеждение, что адаптивное управление является панацеей при решения сложных задач. Однако если адаптивное управление применять с осторожностью и пониманием, оно открывает широкие возможности. Управляющей частью адаптивного регулятора может быть обобщенный дискретный регулятор, рассмотренный в следующем разделе. Несколько типов адаптивных регуляторов выпускаются серийно.
Выбор типа регулятора Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования. Разработчиком могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов. Для того, чтобы выбрать тип регулятора и определить его настройки необходимо знать: 1. Статические и динамические характеристики объекта управления. 2. Требования к качеству процесса регулирования. 3. Показатели качества регулирования для серийных регуляторов. 4. Характер возмущений, действующих на процесс регулирования. Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами. Заметим, что по требованиям технологического регламента многие объекты не допускают применения релейного управляющего воздействия. Рассмотрим показатели качества серийных регуляторов. В качестве серийных предполагаются непрерывные регуляторы, реализующие И, П, ПИ и ПИД - законы управления. Теоретически, с усложнением закона регулирования качество работы системы улучшается. Известно, что на динамику регулирования наибольшее влияние оказывает величина отношения запаздывания к постоянной времени объекта
Таблица 2.1.
где
Наиболее распространенным на практике является ПИ-регулятор, который обладает следующими достоинствами: 1. Обеспечивает нулевую статическую ошибку регулирования. 2. Достаточно прост в настройке, т.к. настраиваются только два параметра, а именно коэффициент усиления 3. Малая чувствительность к шумам в канале измерения (в отличии от ПИД-регулятора). Для наиболее ответственных контуров можно рекомендовать использование ПИД-регулятора, обеспечивающего наиболее высокое быстродействие в системе. Однако, следует учитывать, что это условие выполняется только при его оптимальных настройках (настраиваются три параметра). С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество работы ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора. Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора, что увеличивает дисперсию ошибки регулирования и износ исполнительного механизма. Таким образом, ПИД-регулятор следует выбирать для систем регулирования, с относительно малым уровнем шумов и величиной запаздывания в объекте управления. Примерами таких систем является системы регулирования температуры. При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте
ИЗМЕРИТЕЛИ-РЕГУЛЯТОРЫ
Успехи в микроэлектронике, появление микропроцессоров революционизировали технику построения систем управления. Микропроцессоры стали входить в состав отдельных средств автоматики и контроля. В настоящее время на рынке автоматизации представлено огромное количество микропроцессорных средств автоматики различной степени сложности – от простейших микропроцессорных приборов контроля и локального управления до многоканальных (до нескольких тысяч входов-выходов) микропроцессорных контроллеров.
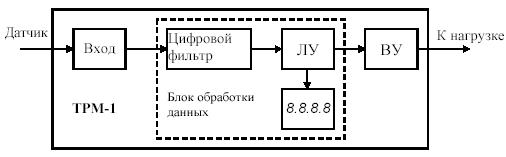
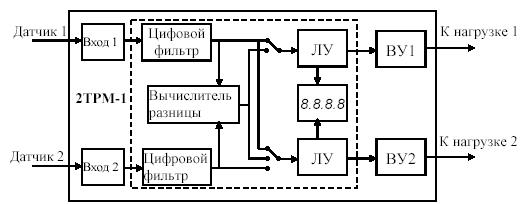
6.1. Измерители-регуляторы на примере ТРМ-1, 2ТРМ-1 Измерители-регуляторы ТРМ-1, 2ТРМ-1 предназначены для измерения и регулирования температуры различных сред. Также они могут использоваться для измерения и регулирования других физических величин, преобразованных в электрический унифицированный сигнал по току (0 … 5 мА, 0 … 20мА, 4 … 20 мА) или напряжению (0 … 1 В). Прибор ТРМ-1 осуществляет одноканальное регулирование по позиционному или пропорциональному закону. 2ТРМ-1 может осуществлять: - независимое регулирование двух измеряемых величин по двухпозиционному или пропорциональному закону; - регулирование одной измеряемой величины по трехпозиционному закону; - регулирование разности температур (или другой физической величины). Приборы выполнены в настенном или в щитовом исполнении с напряжением питания 220 В (ТРМ-1(2)А) или с расширенным диапазоном напряжения питания 85 … 250 В (ТРМ-1(2)Б). Внешний вид приборов представлен на рис. 6.1.
Рис. 6.1. Внешний вид приборов ТРМ-1 и 2ТРМ-1
Рис. 6.2. Функциональная схема прибора ТРМ-1
Рис. 6.3. Функциональная схема прибора 2ТРМ-1
Функциональные схемы приборов представлены на рис. 6.2 и 6.3. ТРМ-1 имеет один вход для подключения измерительного датчика. 2ТРМ-1 содержит два идентичных входа. Вход может быть выполнен в одной из следующих модификаций: ТС – для подключения термометров сопротивления ТСМ или ТСП; ТП – для подключения термопар ТХК, ТХА, ТНН, ТЖК; ТПП – для подключения термопар ТПП; АТ и АН – для подключения датчиков с унифицированным сигналом тока и напряжения, соответственно. Блок обработки данных предназначен для предварительной обработки входного сигнала (цифровой фильтрации, коррекции и масштабирования), индикации измеренной величины и формирования сигнала управления выходным устройством. Блок обработки данных включает логическое устройство (ЛУ), которое может работать в одном из трех режимов: Компаратор (устройство сравнения) – реализуется позиционное регулирование. Для работы ЛУ в этом режиме требуется выходное устройство (ВУ) ключевого типа (реле, оптосимистор, транзисторный ключ). П-регулятор – реализуется аналоговое П-регулирование. Измеритель-регистратор. Для реализации П-регулятора и измерителя-регистратора требуется установка в качестве выходного устройства цифро-аналогового преобразователя с выходным сигналом 4 …20 мА. Модификация входного и тип выходного устройства определяются при заказе прибора. Программирование прибора осуществляется с помощью кнопок, расположенных на передней панели. Программирование заключается в установке параметров регулирования и режимов работы прибора. Все настроечные параметры сохраняются в энергонезависимой памяти прибора и остаются неизменными при выключении питания.
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 764; Нарушение авторского права страницы
 Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования
Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования  , а быстродействие - величиной времени регулирования. Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 2.1.
, а быстродействие - величиной времени регулирования. Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 2.1.
 - время регулирования,
- время регулирования,  - запаздывание в объекте.
- запаздывание в объекте. Теоретически, в системе с запаздыванием, минимальное время регулирования. Руководствуясь таблицей можно утверждать, что наибольшее быстродействие обеспечивает П-закон управления. Однако, если коэффициент усиления П-регулятора
Теоретически, в системе с запаздыванием, минимальное время регулирования. Руководствуясь таблицей можно утверждать, что наибольшее быстродействие обеспечивает П-закон управления. Однако, если коэффициент усиления П-регулятора  мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, т.к. в этом случае велика величина статической ошибки. Если
мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, т.к. в этом случае велика величина статической ошибки. Если  . В таком регуляторе имеется возможность оптимизации
. В таком регуляторе имеется возможность оптимизации  , что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
, что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования. . Если
. Если  то можно выбрать релейный, непрерывный или цифровой регуляторы. Если
то можно выбрать релейный, непрерывный или цифровой регуляторы. Если  , то должен быть выбран непрерывный или цифровой, ПИ- или ПИД-регулятор. Если
, то должен быть выбран непрерывный или цифровой, ПИ- или ПИД-регулятор. Если  , то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях
, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях