
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
В ЗАТЯНУТОМ РЕЗЬБОВОМ соединенииСтр 1 из 7Следующая ⇒
Силовые зависимости В ЗАТЯНУТОМ РЕЗЬБОВОМ соединении Цель работы
Определение зависимости между осевой силой затяжки FА и моментом завинчивания Тзав резьбового соединения при заданных параметрах резьбы, материале болта, виде его термической обработки и классе прочности. Общие сведения
При завинчивании гайки, в соединении действует момент Тзав, создаваемый ключом и уравновешивающий моменты трения в резьбе Тр и на торце гайки ТТ :
В результате затяжки гайки в стержне болта возникает осевое усилие FА и окружная сила Ft , действующая по касательной к среднему диаметру резьбы. Из теории резьбовой пары известно, что
где d2 - средний диаметр резьбы; y - угол подъёма винтовой линии резьбы; r¢ - приведённый угол трения в резьбе, соответствующий приведённому коэффициенту трения
где f - коэффициент трения на горизонтальной плоскости; g - угол профиля витка резьбы. При g = 60о (метрическая резьба) f¢ = 1, 15 f
где fТ - коэффициент трения на торце гайки и опорной втулки; DСР - условный средний диаметр опорной поверхности гайки (рис. 2.1):
где S - наружный размер опорной поверхности гайки (размер «под ключ»); d0 - диаметр отверстия под болт.
Рис. 2.1. Болтовое соединение
В итоге зависимость между моментом и силой затяжки с учётом трения имеет вид:
Работа выполняется на специальной установке ДМ 27М (рис. 2.2), которая состоит из двух узлов: болтового соединения с динамометрической пружиной и индикатором, динамометрического ключа с индикатором и сменными головками под гайки различного размера (рис. 2.3). В стенках динамометрической пружины 1 имеется сквозное отверстие, в которое вставляется болт 2. Затяжка гайки 6 осуществляется динамометрическим ключом. Под головку болта устанавливается сферическая шайба 4, от проворота болт удерживается сухарём 5. Осевая сила пропорциональна величине упругой деформации сжатия динамометрической пружины и замеряется с помощью индикатора 5. Установка снабжена двумя опорными сменными втулками 7 (кулачковой и фланцевой). Фланцевая втулка опирается на упорный подшипник 8 (во второй части экспериментальных исследований она заменяет кулачковую втулку).
Рис. 2.2. Схема установки для нагружения болтового соединения
Рис. 2.3. Динамометрический ключ
Принцип действия установки основан на одновременном определении величины крутящего момента при завинчивании гайки и возникающей при этом осевой силы в стержне болта. Величина момента завинчивания гайки пропорциональна упругой деформации изгиба стержня динамометрического ключа, которая определяется с помощью индикатора. Числовые значения момента завинчивания и осевой силы определяются с помощью тарировочных графиков на каждый ключ и каждую пружину. Для определения момента завинчивания ТЗАВ, фланцевую втулку в установке заменяют кулачковой втулкой, которая фиксируется непосредственно на кронштейне своими выступами. В этом случае упорный подшипник не вращается, и при затяжке соединения преодолевается одновременно как момент трения на торце гайки, так и момент трения в резьбе. Индикатор ключа фиксирует величину Тзав. При определении момента в резьбе ТР необходимо устранить трение между торцом гайки и опорной поверхностью втулки. Для этого на болт под гайку устанавливают сменную фланцевую втулку (рис. 2.4), которая опирается на упорный шарикоподшипник. В этом случае замеряют момент трения в резьбе ТР.
Момент трения на торце гайки находят из формулы (2.1):
Для предохранения установки и болта от поломки предварительно рассчитывают максимально допустимое усилие затяжки FA max. Подготовка к работе 1. Получить задание для проведения лабораторной работы и соответствующую оснастку. 2. Ознакомиться с устройством и принципом действия установки. 3. По ГОСТ 8724-81 определить необходимые размеры болта и гайки. Результаты записать в табл. 2.1. Таблица 2.1 Порядок выполнения работы 1. Установить болт и кулачковую втулку в отверстие динамометрической пружины, навернуть на болт гайку от руки до устранения осевого зазора между торцом гайки и втулкой. 2. Установить индикатор динамометрической пружины и вывести шкалу индикатора на нулевое деление. 3. Подобрать сменную головку динамометрического ключа и вывести шкалу индикатора ключа на нулевое деление. 4. Произвести ступенчатое нагружение болта осевыми силами FA i в соответствии с показаниями индикатора пружины, снимая при этом показания индикатора динамометрического ключа. Показания занести в табл. 2.2. При плавном увеличении момента на динамометрическом ключе фиксируют максимальное показание индикатора при переходе ключа в движение, т.е. при сбросе показаний индикатора. 5. По тарировочному графику динамометрического ключа определить величины Тзав (Н× м) и записать их значения. 6. Повторить эксперимент не менее трёх раз (серии 1, 2, 3). 7. Заменить кулачковую втулку фланцевой. Провести опытное определение ТР в соответствии с пунктами 2¸ 6, снимая соответствующие значения показаний индикатора динамометрического ключа. По тарировочному графику динамометрического ключа определить величины ТР (Н× м). Лабораторная работа № 3 Шлицевого соединения
Цель работы Ознакомление с основными типами шлицевых соединений, их условными обозначениями, способами центрирования, методиками прочностных расчётов и оценкой их несущей способности.
Общие сведения
Шлицевое соединение представляет собой многошпоночное соединение, в котором зубья (шлицы) выполняются заодно с валом (охватываемая деталь) и втулкой (охватывающая деталь), предназначенное для передачи вращающего момента и взаимного осевого перемещения (например, шестерни коробок скоростей). Стандартами предусмотрены три вида шлицевых соединений: прямобочные (ГОСТ 1139-80), эвольвентные (ГОСТ 6033-80), треугольные (ОСТ 100092-73). Обозначение прямобочных шлицевых соединений валов и втулок содержит: – букву, обозначающую поверхность центрирования; – число зубьев z и номинальные размеры D – наружный диаметр, d – внутренний диаметр, b – ширина шлицев; – обозначение полей допусков и посадок диаметров и ширины шлицев. Разрешается не указывать в обозначении допуски нецентрирующих поверхностей (диаметров). Пример условного обозначения прямобочного шлицевого соединения z = 8; d = 36 мм; D = 40 мм; b = 7 мм с центрированием по внутреннему диаметру d и посадкой по этому диаметру d – 8 х 36 d – 8 х 36 то же, при центрировании по наружному диаметру D: d – 8 х 36 х 40 то же, при центрировании по ширине шлицев b: b – 8 х 36 х 40 b – 8 х 36 х 40 х 7 Условное обозначение втулки и вала того же соединения при центрировании по внутреннему диаметру d: втулка: d – 8 х 36 Н7х 40 Н12 х 7 D9 или d – 8 х 36 Н7х 40 х 7 D9; вал: d – 8 х 36 f7х 40 а11 х 7 h9. Обозначение эвольвентных соединений валов и втулок содержит: – цифру, обозначающую номинальный диаметр соединения; – модуль; – посадку соединения в зависимости от способа центрирования (см. ГОСТ 6033-80). Пример условного обозначения эвольвентного шлицевого соединения D = 60 мм; т = 3 мм при центрировании по боковым поверхностям: 60 х 3 х где 9H – поле допуска ширины впадины зубьев втулки; 9g – поле допуска толщины зуба вала; то же, при центрировании по наружному диаметру D: 60 х Условное обозначение втулки и вала того же соединения при центрировании по боковым поверхностям зубьев: втулка: 60 х 3 х 9Н ГОСТ 6033-80; вал: 60 х 3 х 9g ГОСТ 6033-80. При центрировании по наружному диаметру: втулка: 60 х Н7 х 3 ГОСТ 6033-80; вал: 60 х g6 х 3 ГОСТ 6033-80. Шлицевые соединения рассчитываются по напряжениям смятия на боковых поверхностях зубьев и по критерию износостойкости по следующим зависимостям:
где Т – передаваемый вращающий момент, Н·м; dm – средний диаметр соединения, мм; KH – коэффициент неравномерности распределения нагрузки между зубьями (KH = 0, 7 ¸ 0, 8); h – рабочая высота зуба, мм; l – рабочая длина соединения (длина втулки), мм; [sсм] – допускаемое напряжение смятия (табл. 3.1), МПа; [sизн] – допускаемое напряжение на износ, МПа; [sизн]усл – условное допускаемое напряжение при расчёте соединения на изнашивание (табл. 3.4), МПа; KN – коэффициент числа циклов; KЕ – коэффициент эквивалентности режима нагружения (табл. 3.2); Kос – коэффициент осевой подвижности соединения (табл. 3.3); Kсм – коэффициент условий смазки соединения (табл. 3.5):
где N – расчётное число циклов; c – размер продольной фаски зуба (справочная величина)
где n – частота вращения, мин –1; Lh – срок службы соединения, час.
Для выбора условных допускаемых напряжений на изнашивание необходимо определить параметры внешней нагрузки yd и e:
где F – поперечная внешняя нагрузка в зубчатом зацеплении, Н:
где Ft и FR – окружное и радиальное усилия в зацеплении, Н:
aw – угол зацепления передачи; b – угол наклона линии зуба на делительном цилиндре колеса d. Таблица 3.1 Порядок выполнения работы 1. Получить шлицевую деталь с перечнем исходных данных. 2. Расшифровать обозначение соединения, указать поверхность центрирования, привести условное обозначение шлицев данной детали, выполнить эскиз детали с указанием требуемых размеров, классов шероховатостей и полей допусков. 3. Выполнить прочностной расчёт соединения или оценить его нагрузочную способность, т.е. определить [T]. 4. Выполнить проверочный расчёт на изнашивание. 5. Оформить отчёт по лабораторной работе и представить его на рецензирование.
Контрольные вопросы 1. Как классифицируются шлицевые соединения по форме боковой поверхности зуба? 2. Как классифицируются шлицевые соединения по характеру относительной подвижности деталей соединения? 3. Назовите основные способы центрирования шлицевых соединений. 4. Какой способ центрирования предпочтителен в реверсивных шлицевых соединениях? 5. Какие основные параметры входят в условное обозначение шлицевого соединения: прямобочного, эвольвентного? 6. Приведите пример условного обозначения прямобочного шлицевого соединения: z = 8; d = 62 мм; D = 68 мм; b = 12 мм лёгкой серии с центрированием по внутреннему диаметру; по наружному диаметру; по ширине шлицев. 7. Приведите пример условного обозначения эвольвентного шлицевого соединения: z = 18; D = 100 мм; т = 5 мм с центрированием по боковым поверхностям зубьев, по наружному диаметру. 8. Когда используется треугольное шлицевое соединение? 9. По каким напряжениям рассчитываются шлицевые соединения? 10. Для каких соединений критерий изнашиваемости является определяющим? 11. Как влияет термическая обработка зубьев на несущую способность соединения? 12. Как влияет частота вращения и срок службы на критерий износостойкости? 13. Оцените влияние числа зубьев на несущую способность шлицевого соединения. 14. Основные достоинства и недостатки шлицевых соединений. 15. Какие материалы используются для изготовления деталей шлицевых соединений? 16. Чем обусловлено возникновение опрокидывающего момента в шлицевом соединении? 17. Как влияют условия смазки на износостойкость соединения? 18. Какие шлицы создают меньшую концентрацию напряжений? 19. Что означают цифры и буквы в обозначении эвольвентных шлицев: 7Н, 9Н, 11Н? 20. Какой диаметр является номинальным в эвольвентном шлицевом соединении? 21. С какой целью применяют смещение режущего инструмента при изготовлении эвольвентных шлицев?
Лабораторная работа № 4 Изучение конструкции Цель работы Изучение конструкции цилиндрического двухступенчатого редуктора, измерение его габаритных и присоединительных размеров, определение параметров зубчатого зацепления, расчёт допускаемой нагрузки из условия обеспечения контактной выносливости зубчатой передачи.
Общие сведения
Зубчатые редукторы - это механизмы, служащие для понижения угловых скоростей и увеличения крутящих моментов, выполненные в виде отдельных агрегатов. Зубчатые редукторы имеют широкое применение, особенно в подъёмно-транспортном, металлургическом, горном машиностроении. Наиболее распространены в машиностроении цилиндрические редукторы. Современные зубообрабатывающие станки обеспечивают изготовление цилиндрических зубчатых колёс диаметром до нескольких метров, что позволяет передавать любые мощности. В современных высокоточных передачах достигнуты окружные скорости Jдо 120¸ 180 м/с. Срок службы цилиндрических редукторов достигает нескольких лет. Наиболее распространённые схемы одно- и двухступенчатых редукторов с цилиндрическими колёсами показаны в табл. 4.1. С помощью одной цилиндрической зубчатой пары (схема 1) можно изменять угловую скорость в несколько десятков раз. Однако величину передаточного числа одной цилиндрической пары нерационально назначать больше u = 8¸ 10. При больших значениях одноступенчатые редукторы уступают по габаритам редукторам, в которых заданное u распределено между двумя ступенями. Таблица 4. 1 Порядок выполнения работы 1. Выполнить эскиз редуктора, замерить габаритные и присоединительные размеры редуктора и проставить их на эскизе (рис. 4.2). 2. Изучить конструкцию и назначение деталей и составить кинематическую схему редуктора. 3. Замерить межосевые расстояния awб и awт , согласовывая их с ГОСТ 2185-81 на межосевые расстояния aw цилиндрических редукторов, мм: 100; 112; 125; 140; (150); 160; 180; 200; 225; 250 и т.д. 4. Расшифровать параметры зубчатых передач, заполняя таблицу 4.2. 5. Для обеих ступеней редуктора вычислить передаточные числа:
где z1 и z3 - числа зубьев шестерён; z2 и z4 - числа зубьев колёс. 6. Замерить ширину венца bw передач и рассчитать коэффициенты ширины:
Таблица 4.2 Нагрузки по ширине венца
Примечание: 1 - передачи с консольным расположением шестерни; 2 - передачи с несимметричным расположением колеса по отношению к опорам; 3 - передачи с симметричным расположением колеса по отношению к опорам.
Таблица 4.4 Лабораторная работа № 5 Червячного редуктора
Цель работы
Изучение конструкции червячного редуктора, измерение его габаритных и присоединительных размеров, определение параметров червячного зацепления.
Общие сведения Червячная передача относится к зубчато-винтовым передачам и состоит из червяка, рабочие поверхности которого являются винтовыми поверхностями, и червячного колеса, линии зубьев которого имеют продольную форму. Оси червяка и колеса перекрещиваются в пространстве обычно под углом 90°. Неподвижный в осевом направлении червяк при вращении как бы ввинчивается в частично охватывающие его зубья колеса, сообщая колесу вращательное движение. Касание зубьев колеса и витков червяка происходит по линиям, благодаря чему обеспечивается сравнительно высокая несущая способность. По условию самоторможения обычно ведущим звеном является червяк, но встречаются передачи с ведущим колесом, например, в центрифугах, в приводе к нагнетателю двигателя внутреннего сгорания и др. Преимуществами червячных передач по сравнению с зубчатыми являются меньшие интенсивность шума и виброактивность, повышенная плавность работы, возможность получения значительного передаточного числа u в одной сопряжённой паре. Величина u обычно колеблется от 8 до 100, а чаще всего u=10¸ 63. Передача движения между скрещивающимися валами во многих случаях оказывается существенным достоинством червячных передач, обеспечивающим более рациональную компоновку машины. В сравнении с зубчатыми, червячные передачи имеют следующие недостатки: повышенную стоимость, бό льшие потери на трение (в три – четыре раза и более), бό льшие эксплуатационные расходы, необходимость использования дефицитных бронз (за исключением тихоходных малоответственных передач). В связи с отмеченными особенностями, червячные передачи применяют при ограниченных мощностях (обычно до 60 кВт) в тех случаях, когда предъявляются повышенные требования к плавности и бесшумности привода, а также при необходимости осуществлять передачу между скрещивающимися осями. От материалов червячных пар требуются хорошая прирабатываемость, антифрикционность, пониженная склонность к заеданию и хорошая износостойкость. Червяки изготавливают из стали, термически обработанной до высокой твёрдости. Наилучшей работоспособностью обладают червяки из цементуемых сталей (15Х, 20Х, 18ХГТ) с твёрдостью после закалки HRC ³ 55¸ 63. Широко применяются червяки из среднеуглеродистых сталей (40, 45, 50, 40Х, 40ХН) с поверхностной или объёмной закалкой до твёрдости HRC ³ 40¸ 55. Венцы червячных колёс при высоких скоростях скольжения (от 8 до 30 м/с) изготавливают из оловянистых бронз Бр.ОФ10-1, Бр.ОНФ10-1-1 и др., а также из сурьмяно-никелевых бронз. При средних скоростях (от 2 до 8 м/с) применяют алюминиево-железистую бронзу Бр.АЖ9-4, некоторые другие безоловянистые бронзы и латуни. Для тихоходных передач можно использовать серые чугуны СЧ 15-32, СЧ 18-36 при vs £ 2 м/с. В настоящее время отечественные редукторостроительные заводы выпускают универсальные червячные редукторы общемашиностроительного применения типа РЧУ по ГОСТ 13563-85, которые благодаря наличию отъёмных лап могут быть установлены в любом из положений, показанном на рис. 5.1. Корпуса универсальных редукторов (рис. 5.2) изготавливаются из алюминиевого сплава Ал.3 и имеют высокую степень оребрения. Корпус 4 редуктора изготовлен без разъёма. Монтаж червячного колеса 5 осуществляют через крышку 6, а подшипники 15 колеса устанавливают в специальных стаканах 13 и 17. Червячное колесо 5 в целях экономии цветных металлов выполняют в виде зубчатого венца на ступице. Вал 19 червячного колеса установлен в ступице с помощью шлицевого соединения. Опорами червяка 9 служат подшипники 11, которые устанавливаются «в распор». Регулируют зацепление набором прокладок 2, 7, 14, 16, устанавливаемых между прижимными крышками 1 и 10 червяка и корпусом, стаканами 13 и 17 и корпусом.
Рис. 5.1. Схемы червячных пар: а – горизонтальный червяк под колесом; б – горизонтальный червяк над колесом; в – боковое расположение червяка; г – вертикальное расположение червяка
Основной вид смазки редуктора – смазка окунанием. При нижнем расположении червяка уровень масла обычно назначают так, чтобы витки червяка были полностью погружены в масло. Часто для повышения нагрузочной способности уровень масла повышают до оси червяка и выше. Уровень масла при верхнем расположении червяка существенного значения не имеет. Для контроля уровня масла применяют маслоуказатель 3. Для заливки масла и контроля пятна контакта зубьев колеса и витков червяка при регулировке зацепления используют крышку 6 редуктора. В нижней части редуктора установлена пробка 12 для слива отработанного масла.
Рис. 5.2. Червячный редуктор типа РЧУ
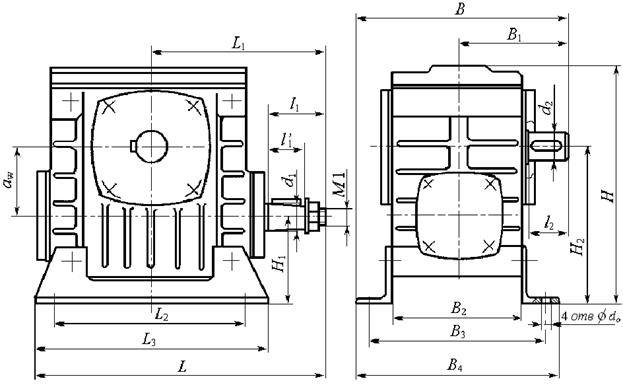
Для устранения утечки масла и попадания внутрь редуктора пыли и грязи, в сквозной крышке 10 червяка и в стакане 17 колеса установлены уплотнения манжетного типа 8 и 18. Для установки редуктора на раме или фундаменте могут быть использованы отъёмные лапы 20. Габаритными называют максимальные размеры редуктора в трёх измерениях. Присоединительными являются те размеры редуктора, которые необходимы для выбора сопряжённых с ним деталей, а также для установки его на раме или фундаменте (рис. 5.3). Цилиндрические червяки выполняют с линейчатыми и нелинейчатыми боковыми поверхностями витков. Боковые поверхности линейчатых червяков являются следом прямой линии, совершающей винтовое движение постоянного шага. Если прямая проходит через ось (торцовое сечение очерчено спиралью Архимеда), то червяк называют архимедовым. Если же сечения боковых поверхностей витков плоскостью, перпендикулярной впадине или витку, прямолинейны, то червяк называют конволютным. Нелинейчатую винтовую поверхность имеют эвольвентные червяки. Профиль витка этих червяков в сечении, перпендикулярном к оси, очерчен по эвольвенте круга, поэтому червяк можно рассматривать как эвольвентное косозубое зубчатое колесо с малым числом зубьев и большим углом наклона. В действующих стандартах (ГОСТ 19036-73, СТ СЭВ 226‑ 76, ГОСТ 18498-73, ГОСТ 1965-74 и др.) червячным передачам с архимедовым червяком присваивается обозначение ZA, с эвольвентным – ZI, с конволютными червяками – ZN1 и ZN2 соответственно при прямолинейном очертании боковых сторон в нормальном сечении витка и в нормальном сечении впадин. Основные параметры зацепления червячных передач, осевой модуль червяка m и коэффициент диаметра червяка q, стандартизированы (табл. 5.1).
Рис. 5.3. Габаритные и присоединительные размеры червячного редуктора типа РЧУ
Таблица 5.1 Осевые модули m и коэффициенты диаметра червяка q по ГОСТ 19672-74
Примечание: * – 2-й ряд
Для унификации режущего инструмента, используемого при изготовлении червячных передач, в ГОСТ 2144-76 предусмотрены только правые червяки с числом заходов z1 = 1; 2; 4. Число зубьев колеса z2 не регламентировано, но z2 min = 26÷ 28 из условия отсутствия подрезания ножки зуба. Длина нарезанной части червяка b1 приведена в табл. 5.2. Для шлифуемых и фрезеруемых червяков полученную в табл. 5.2 длину следует увеличить: при m £ 10 мм на 25 мм, при m > 10 мм на 40¸ 50 мм. Таблица 5.2 Порядок выполнения работы 1. Ознакомиться с конструкцией изучаемого редуктора, дать краткое описание его, обратив внимание на взаимное расположение червяка и червячного колеса, конструкцию корпуса, червяка и колеса, опорных узлов, изобразить кинематическую схему редуктора. 2. Измерить габаритные и присоединительные размеры редуктора. Произвести разборку редуктора. Выполнить схематический чертёж редуктора на базе рис. 5.3, с указанием габаритных и присоединительных размеров. 3. Измерить основные размеры червяка и червячного колеса: межосевое расстояние aw, осевой шаг P для нахождения осевого модуля m (при этом Р получен путём двух последовательных замеров осевой длины червяка с разностью в один выступ), длину нарезанной части червяка b1, ширину червячного колеса b2; определить число заходов червяка z1 и подсчитать число зубьев колеса z2. Измеренное межосевое расстояние округлить до стандартного. Осевой модуль червяка m* = P*/p согласовать с ГОСТом по табл. 5.1. Рассчитать коэффициент диаметра червяка q по формуле 4. Произвести расчёт основных размеров червячной пары в последовательности, указанной в табл. 5.3. 5. Выполнить рабочий эскиз колеса или червяка. 6. Оформить отчёт по лабораторной работе и представить его на рецензирование.
Контрольные вопросы
1. Объясните, почему зубья червячного колеса имеют дугообразную форму? 2. Почему червячную передачу не рекомендуется применять при больших мощностях? 3. Как определяется направление винтовой линии и заходность червяка? 4. Из каких соображений выбирают число заходов червяка z1 ? 5. Объясните, почему осевое усилие червяка всегда больше окружного и радиального усилий? 6. Изменится ли направление вращения червячного колеса, если червяк перевести из нижнего положения в верхнее, сохраняя прежнее направление его вращения? 7. Почему расчёт червячных передач на прочность ведётся по зубу колеса, а не по витку червяка? 8. Какие материалы применяются для изготовления венцов червячных колёс? 9. Почему число зубьев червячных колес обычно принимают не менее 28? 10. Какие параметры зацепления червячных передач являются основными? 11. Какие типы червяков применяются в червячных передачах? 12. Какое число заходов могут иметь червяки в червячных передачах? 13. Какие требования предъявляют к материалам червячных пар? 14. Какие схемы расположения червяка и червячного колеса применяются в редукторах типа РЧУ? 15. При каком коэффициенте смещения диаметр начальной окружности червяка совпадает с его делительным? 16. Какова цель оребрения корпуса редуктора? 17. На основе какого параметра назначается материал венца червячного колеса? Лабораторная работа № 6
Цель работы Изучение конструкций, классификации и условных обозначений в маркировке основных типов подшипников качения.
Общие сведения Подшипники качения изготавливают из высококачественных высокоуглеродистых хромистых сталей типа ШХ (1¸ 1, 2 % С, 0, 4¸ 1, 65 % Cr). Тела качения выполняют из сталей ШХ6, ШХ9, ШХ15, кольца - из сталей ШХ9, ШХ15, ШХ15СГ, а для крупных подшипников - из стали 20Х2Н4А. Подшипники для работы в агрессивных средах выполняют из коррозионно-стойкой стали типа 95Х18. Основные признаки классификации: направление действия воспринимаемой нагрузки, форма тел качения и число их рядов, конструктивные особенности подшипника, класс точности. По направлению действия воспринимаемой нагрузки подшипники делят на три группы: радиальные, воспринимающие только радиальную нагрузку; упорные, предназначенные только для осевой нагрузки; радиально-упорные, предназначенные для восприятия радиальной и осевой нагрузки, одновременно. По форме тел качения различают шариковые и роликовые подшипники. Существуют следующие виды роликов: короткие цилиндрические, длинные цилиндрические, игольчатые, витые, конические, сферические, сфероконические. По числу рядов тел качения подшипники выполняют однорядными, двухрядными и многорядными. Отдельные типы подшипников выполняют самоустанавливающимися, а также с различными конструктивными изменениями: с защитными уплотнительными шайбами и кольцами, коническими посадочными отверстиями, канавками, упорными заплечниками и т.п. Подшипники качения имеют различную статическую и динамическую грузоподъёмности и частоту вращения, соотношения которых по типам подшипников даны ниже:
Относительная долговечность шариковых и роликовых подшипников разных серий диаметром 100 мм при одинаковой нагрузке и частоте вращения показана ниже:
Радиальный однорядный шарикоподшипник (тип 0000) воспринимает радиальную нагрузку, а также осевую в обе стороны, не превышающую 70 % разности между радиальной допустимой и действующей нагрузками. Подшипник фиксирует осевое положение вала в обоих направлениях в пределах осевого зазора и допускает перекос осей колец до 0, 25о(15′ ). Благодаря невысокой стоимости, простоте монтажа и особенности воспринимать комбинированную (радиальную и ограниченную осевую) нагрузку, радиальный шарикоподшипник получил наибольшее применение среди других типов. Радиальный двухрядный сферический шарикоподшипник (тип 1000) применяют в узлах с нежесткими валами, а также в конструкциях с отдельными опорами. Этот подшипник самоустанавливающийся, воспринимает радиальную и ограниченную осевую нагрузки, допускает относительный перекос внутреннего и наружного колец до 3°. Радиальные роликоподшипники выпускают в нескольких конструктивных разновидностях, отличающихся наличием упорных бортов и различием в их расположении на внутреннем и наружном кольцах. Подшипник с короткими цилиндрическими роликами (тип 2000) воспринимает значительную радиальную нагрузку и не предназначен для осевой нагрузки, по быстроходности не уступает радиальному шарикоподшипнику, а по грузоподъёмности превосходит его примерно в 1, 5 раза. Однако этот подшипник требует большой точности в соосности посадочных поверхностей, иначе могут возникать кромочные давления роликов на дорожках качения, резко снижающие срок службы подшипника. Подшипник с игольчатыми роликами (тип 74000) применяют в узлах с диаметральной компактностью, а также при работе в колебательном режиме. Осевую нагрузку игольчатый подшипник не воспринимает, очень чувствителен к прогибам валов и несоосности посадочных поверхностей. Игольчатые подшипники могут работать без внутреннего кольца, или без наружного кольца или с иглами в сепараторе без обоих колец. Радиально-упорный шарикоподшипник (тип 6000) воспринимает комбинированную нагрузку (радиальную и осевую одновременно). Осевая грузоподъёмность при этом зависит от номинального угла контакта подшипника, который может быть равным 12°, 26° и 36° (соответственно для подшипников типа 36000, 46000 и 66000). Подшипники с большими углами контакта (26° и 36°) предназначены для больших осевых нагрузок, которые могут превышать действующую радиальную нагрузку. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1009; Нарушение авторского права страницы
 .
.
 ;
;
 ,
,
 ,
,  ,
,







 .
. и по ширине шлицев b –
и по ширине шлицев b –  :
:  х 40
х 40  х 7
х 7  х 7
х 7  ;
;  или
или ГОСТ 6033-80,
ГОСТ 6033-80,  х 3 ГОСТ 6033-80.
х 3 ГОСТ 6033-80.
 ;
;  ;
;  , (3.3)
, (3.3) , (3.4)
, (3.4) ,
,
 ,
,
 ;
;  ,
,  ,
,  ,
,
 .
.











 , предварительно замерив диаметр вершин
, предварительно замерив диаметр вершин  витков червяка и согласовать q с ГОСТом (табл. 5.1).
витков червяка и согласовать q с ГОСТом (табл. 5.1).