|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИЗУЧЕНИЕ ДЕФОРМАЦИИ РАСТЯЖЕНИЯ
Цель работы – изучение зависимости величины деформации твердого тела от напряжения при деформации растяжения.
Идея эксперимента
В эксперименте подвергается растяжению металлическая проволока. Точное измерение величины деформации в зависимости от нагрузки позволяет установить основные закономерности и характеристики деформации растяжения.
Теоретическая часть
Все реальные тела деформируемы. Под действием приложенных сил они меняют свою форму или объем. Такие изменения называются деформациями. В случае твердых тел различают два предельных случая: деформации упругие и деформации пластические. Упругими называются деформации, исчезающие после прекращения действия приложенных сил. Пластическими или остаточными деформациями называют такие деформации, которые сохраняются в теле, по крайней мере, частично, и после прекращения действия внешних приложенных сил. Является ли деформация упругой или пластической – это зависит не только от материала тела, но и от величины приложенных сил. Если сила (точнее, сила, отнесенная к единице площади, т.е. напряжение) не превосходит известной величины, называемой пределом упругости, то возникающая деформация будет упругой. Если же она превосходит этот предел, то возникающая деформация будет пластической. Разделение тел на упругие и пластические в какой-то степени условно. Строго говоря, все деформации после прекращения действия внешних сил исчезают не полностью, а потому являются пластическими. Различные части деформированного тела взаимодействуют между собой на поверхностях раздела, вдоль которых они граничат между собой. Рассмотрим произвольное деформированное тело или среду. Мысленно разделим его две части: тело I и тело II, граничащие между собой вдоль поверхности АВ (рис. 13). Т.к. тело I деформировано, то оно действует на тело II с некоторой силой. Соответственно тело II действует на тело I с такой же, но противоположно направленной силой. Однако для определения возникающих при этом деформаций необходимо знать как эти силы распределены по сечению. Возьмем на поверхности АВ бесконечно малую площадку dS. Пусть
Возьмем однородный стержень и приложим к его основаниям растягивающие или сжимающие силы F (рис. 14, а и б). Стержень будет деформирован, т.е. сжат или растянут. Сила, отнесенная к единице площади поперечного сечения, называется напряжением. В данном случае напряжение перпендикулярно к поперечному сечению стержня. Если стержень растянут, то это напряжение называется натяжением и определяется выражением
где S – площадь поперечного сечения стержня. Если же стержень сжат, то напряжение называется давлением и численно определяется той же формулой
Легко заметить, что Пусть l0 – длина недеформированного стержня. После приложения силы F его длина получает приращение Δ l и становится равной l = l0 + Δ l. Отношение
называется относительным удлинением стержня. В случае растяжения оно положительно, при сжатии – отрицательно. Как показывает опыт, для не слишком больших упругих деформаций натяжение Т (или давление Р) пропорционально относительному удлинению (или относительному сжатию).
где Е – постоянная, зависящая только от материала стержня и его физического состояния. Она называется модулем Юнга. Последние формулы выражают закон Гука для деформаций растяжения или сжатия стержней. Это приближенный закон и для больших деформаций он может не выполняться. Деформации, для которых закон Гука приближенно выполняется, называются малыми деформациями. Более общим, чем закон Гука, является утверждение, что в случае упругих деформаций натяжение Т является однозначной функцией относительного удлинения ε . Оказывается, что если деформации малы, то упругие постоянные тел не изменяются при деформациях. Таким образом, если на тело действует несколько сил, то для вычисления результирующей деформации можно вычислить сначала деформации, вызываемые каждой силой в отдельности (как если бы остальных сил не было совсем), а затем полученные деформации сложить. Это положение называется принципом суперпозиции малых деформаций. Упругая энергия растянутого стержня равна
Объемная плотность упругой энергии, т.е. упругая энергия u, приходящаяся на единицу объема растянутого (или сжатого) стержня, равна
Если воспользоваться законом Гука, то это выражение можно привести к виду
Как показывает опыт, под действием растягивающей или сжимающей силы F изменяются не только продольные, но и поперечные размеры стержня. Если сила F – растягивающая, то поперечные размеры стержня уменьшаются. Если же она сжимающая, то они увеличиваются. Пусть а0 – толщина стержня до деформации, а – после деформации. За толщину можно принять для круглого стержня его диаметр, для прямоугольного – одну из сторон его основания и т.д. Если сила F растягивающая, то величина
Коэффициент Пуассона зависит только от материала тела и является одной из важных постоянных, характеризующих его упругие свойства. Модуль Юнга Е и коэффициент Пуассона μ полностью характеризуют упругие свойства изотропного материала. Все остальные упругие постоянные могут быть выражены через Е и μ . Таким образом, упругая деформация твердых тел описывается законом Гука где s = F/S – нормальное напряжение (отношение силы F, приложеннойперпендикулярно поперечному сечению образца, к площади S этого сечения), Модуль Юнга характеризует упругие свойства твердых тел при деформации растяжения – сжатия. Он численно равен величине напряжения, которое вызывает изменение длины образца вдвое, если деформация при этом остается упругой. С другой стороны, модуль Юнга можно понимать как величину, численно равную объемной энергии деформации при удвоении размеров образца. Закон Гука справедлив лишь для идеально упругих тел. Для реальных же тел наблюдаются различные отклонения от этого закона. На рис. 15 представлена характерная диаграмма растяжения твердого тела. Строгая пропорциональность между относительным удлинением и напряжением наблюдается лишь при сравнительно небольших нагрузках, на участке 0А.
Напряжение σ п, при котором выполняется закон Гука, называется пределом пропорциональности. Максимальное напряжение sуп, при котором еще не возникают остаточные деформации(относительная остаточная деформацияне превышает0, 1 %), называется пределом упругости. Ему соответствует точка В на диаграмме деформации. Предел текучести – это напряжение, которое характеризует такое состояние деформируемого тела, после которого удлинение возрастает без увеличения действующей силы (горизонтальный участок ВС). Пределом прочности sпр (точка D) называется напряжение, соответствующее наибольшей нагрузке, выдерживаемой телом перед разрушением. Отклонения от закона Гука в области напряжений, не превосходящих предела упругости, объединяются общим понятием неупругости. Проявлением неупругости являются, например, упругие последействия и упругий гистерезис, подлежащий экспериментальному наблюдению в данной работе. Явление упругого последействия заключается в изменении со временем деформационного состояния при неизменной величине напряжения. В этом случае после приложения нагрузки к образцу деформация возникает не мгновенно, а продолжает увеличиваться с течением времени (прямое упругое последействие); также и после снятия нагрузки: деформация образца исчезает не мгновенно, а продолжает уменьшаться во времени (обратное упругое последействие). Площадь, ограниченная кривой нагрузки и двумя абсциссами, соответствующими двум значениям относительной деформации, пропорциональна работе А внешних сил или, что тоже, потенциальной энергии Еп при упругом деформировании образца. Это следует из расчета элемента площади DQ под кривой
где с – коэффициент пропорциональности, DW1 – объемная плотность энергии деформации образца. Коэффициент пропорциональности с равен объемной плотности энергии деформации, приходящейся на единицу площади, ограниченной графиком, и имеет размерность Дж/клетку. Площадь под всей кривой нагрузки соответствует объемная плотность энергии W1, а площади под всей кривой разгрузки – объемная плотность энергии W2. Если к образцу прикладывать сначала возрастающее напряжение, а затем производить разгрузку, то на графике s = f(e) кривая нагрузки не будет совпадать с ветвью разгрузки. При полном цикле нагрузки – разгрузки график образует фигуру, называемую петлей гистерезиса. Площади петли пропорциональна объемная плотность поглощенной энергии упругости DW, перешедшей в тепло. Явления необратимого превращения в теплоту механической энергии (иначе, диссипация энергии) в процессах деформирования твердых тел связано с так называемым внутренним трением. Для количественной оценки внутреннего трения материалов часто пользуются относительной величиной – коэффициентом поглощения
где W1 – энергия упругой деформации при нагрузке образца. Явления неупругости присущи всем реальным твердым телам, как полимерным, так и низкомолекулярным, в том числе металлам. Явления неупругости металлов и других кристаллических тел связаны с дефектами кристаллической решетки: различными точечными дефектами, дислокациями и вызванными ими неоднородностями структуры и, как следствие, наличием внутренних механических микронапряжений в твердых телах. Неупругость полимерных материалов обусловлена изменением структуры макромолекул под действием механических напряжений.
Экспериментальная установка
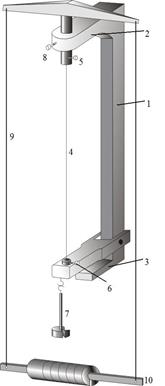
Установка для наблюдения деформации растяжения представлена на рис. 16. Она состоит из массивного основания 1 с верхним 2 и нижним 3 кронштейнами. Испытуемый образец – проволока 4, закрепляется с помощью винтовых зажимов 5 и 6. К нижнему зажиму прикреплена платформа 7, на которую для создания нагрузки накладываются грузы. Для удобства закрепления проволоки верхний зажим сделан подвижным и может фиксироваться с помощью винта 8. Для того чтобы верхний кронштейн во время измерений находился под постоянной нагрузкой и имел постоянный изгиб, к нему на тягах 9 подвешена горизонтальная планка 10. На неё перед измерениями навешиваются все грузы, которые затем перекладываются на платформу. Прибор устанавливается (обычно крепится к стене) в вертикальном положении. Для точного измерения величины деформации в работе применяется катетометр. Катетометр предназначен для измерения вертикальных отрезков, расположенных на расстояниях
несколько десятков сантиметров от объектива зрительной трубы катетометра. Катетометр (рис. 17) состоит из вертикального штатива с колонкой 1 на треножнике, измерительной каретки 2, зрительной трубы 3 и отсчетного микроскопа 4. Подъемными винтами 5 треножника колонку можно устанавливать по круглому уровню строго вертикально. С помощью ручек 6 колонку можно поворачивать вокруг вертикальной оси. Измерительная каретка 2, несущая зрительную трубу 3 и отсчетный микроскоп 4, перемещается по колонке на роликах. Грубое перемещение каретки по вертикали осуществляется от руки при открепленном винте 7, точное – с помощью микрометрического винта 8 при закрепленном винте 7. Зрительная труба 3 укреплена на каретке. Фокусировка трубы на выбранную точку объекта производится вращением маховика 9. Сбоку на тубусе имеется цилиндрический уровень, ось которого параллельна визирной оси трубы. Уровень устанавливается в горизонтальном положении микрометрическим винтом путем совмещения изображения концов пузырька, рассматриваемого через окуляр зрительной трубы. При совмещении половинок пузырька визирная ось зрительной трубы принимает строго горизонтальное положение. Измерительная система катетометра состоит из зрительной трубы и отсчетного микроскопа с осветительной системой. В фокальной плоскости окуляра отсчетного микроскопа установлена масштабная сетка (рис. 18), на которую специальным оптическим устройством проектируется миллиметровая шкала. Измерение расстояний между двумя точками производится с помощью зрительной трубы и отсчетного микроскопа путем сравнения измеряемой длины с миллиметровой шкалой.
Перемещая каретку со зрительной трубой и отсчетным микроскопом по колонке вдоль миллиметровой шкалы, а также вращая колонку вокруг вертикальной оси, устанавливают трубу на выбранные точки объекта; отсчеты снимают через окуляр отсчетного микроскопа по шкале и масштабной сетке. Длины вертикальных отрезков определяют как разность соответствующих отсчетов по шкале. Катетометр снабжен трансформатором для включения в сеть осветительной части отсчетного микроскопа.
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 3106; Нарушение авторского права страницы

 – сила, с которой на этой площадке тело II действует на тело I. Сила, отнесенная к единице площади, т.е.
– сила, с которой на этой площадке тело II действует на тело I. Сила, отнесенная к единице площади, т.е.  , называется напряжением, действующим в точке на границе АВ. Ориентацию площадки dS можно задать, указав направление нормали к ней. Будем считать, что нормаль направлена наружу от поверхности тела, на которое действует сила
, называется напряжением, действующим в точке на границе АВ. Ориентацию площадки dS можно задать, указав направление нормали к ней. Будем считать, что нормаль направлена наружу от поверхности тела, на которое действует сила  единичный вектор такой нормали, а
единичный вектор такой нормали, а  – соответствующее напряжение. Вектор
– соответствующее напряжение. Вектор 
 ,
,  .
. .
.
 или
или  ,
,  .
. .
. .
. называется относительным поперечным сжатием стержня (Δ а = а – а0). Отношение относительного поперечного сжатия к соответствующему относительному продольному удлинению называется коэффициентом Пуассона
называется относительным поперечным сжатием стержня (Δ а = а – а0). Отношение относительного поперечного сжатия к соответствующему относительному продольному удлинению называется коэффициентом Пуассона .
. , (6.1)
, (6.1) – относительная деформация (отношение удлинения Dl к первоначальной длине l0образца), Е – модуль упругости (модуль Юнга).Заметим, что s численно равно энергии, приходящейся на 1 м3 деформируемого материала.
– относительная деформация (отношение удлинения Dl к первоначальной длине l0образца), Е – модуль упругости (модуль Юнга).Заметим, что s численно равно энергии, приходящейся на 1 м3 деформируемого материала.
 , (6.2)
, (6.2) , (6.3)
, (6.3)