
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Движение материальной точки по окружности
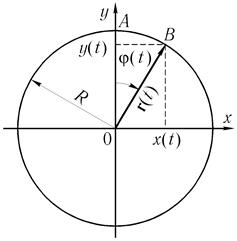
Рассматриваем вращательное движение абсолютно твердого тела вокруг неподвижной оси. Для этого построим прямоугольную декартову систему координат так, чтобы ось z совпала с осью вращенеия Угловая скорость по определению w = df / dt Угловое ускорение e = d2f / dt2 = dw / dt Декартовы координаты выражаются через радиус окружности и угол следующим образом x = Rcosf y = Rsinf
используя формулы для скорости и правила дифференцирования сложной функции, находим проекцию вектора скорости на ось абсцисс Vx = dx /dt = (dx/df)(df/dt) Учитывая, что dx / df = - Rsinf Получаем для скорости Vx = - Rwsinf Аналогично для составляющей по оси ординат Vу = dy /dt = (dy/df)(df/dt) = Rwcosf vz =0 Если проделать соответствующие преобразования(скорость равна корню из суммы квадратов составляющих скоростей), то для скорости можно получить V = R|w|
Вектор угловой скорости можно представить вектором перпендикулярным плоскости вращения w = |w| к
Из этого определения следует, что когда ось z совпадает с осью вращения тела, координаты вектора угловой скорости w будут wx =0, ω y =0, ω z =w При помощи формул для векторного произведения нетрудно убедиться в том, что векторное произведение вектора угловой скорости на радиус – вектор точки с координатами x, y, z равно вектору скорости Формула векторного произведения(вектор, равный по величине площади параллелограмма, построенного на векторах a, r и направленного перпендикулярно плоскости составленной из векторов a и r так, что результирущий вектор составляет правую тройку с векторами произведения)
[ ar ] = | i j k | | ax ay az | | x y z |
Векторное произведение вектора угловой скорости на радиус – вектор точки
[ wr ] = | i j k | | 0 0 w |
Кинематика поступательного и вращательного движения
Модуль и направление углового перемещения
Движение тела по криволинейной траектории можно приближенно представить как движение по дугам некоторых окружностей см. рис.1. Пусть произвольная точка М сначала находилась в неподвижной плоскости Q (рис. 2). Затем переместилась в подвижной плоскости P на угол поворота Угол поворота (угловое перемещение) будим отсчитывать от неподвижной плоскости Q по часовой стрелке (см. рис. 3).
Направление углового перемещения
Модуль углового перемещения запишется по аналогии с координатой:
Модуль и направление угловой скорости При малом угловом перемещении Разделим обе части последнего выражения на
где выражение
Вектор угловой скорости направлен вдоль оси вращения по правилу правого винта, т.е. также как и вектор
Модуль угловой скорости запишется по аналогии с линейной скоростью:
Мгновенная угловая скорость. Мгновенная угловая скорость равна первой производной углового перемещения по времени:
При равномерном вращении
Связь линейной и угловой скоростей.
Если продолжить (3), то получим:
Вектор линейной скорости совпадает по направлению с векторным произведением
Модуль векторного произведения:
Модуль и направление углового ускорения. При вращении за время
Разделим обе части на
где отношение
т.е.
Вектор углового ускорения
|
Последнее изменение этой страницы: 2017-03-14; Просмотров: 581; Нарушение авторского права страницы

 .
.


 или
или  или
или 
 или
или  или
или 
 равен (
равен (  (2)
(2) :
:  или (3)
или (3) (4)
(4) - есть средняя угловая скорость, т.е
- есть средняя угловая скорость, т.е , (5)
, (5)



 или
или  или
или 
 или
или  или
или  или
или 
 (6)
(6) , тогда
, тогда (7)
(7) или
или (8)
(8) (9)
(9) . Векторное произведение всегда связано с правилом правого винта: вращая головку винта по направлению вектора
. Векторное произведение всегда связано с правилом правого винта: вращая головку винта по направлению вектора  , стоящего на первом месте в (9), к вектору
, стоящего на первом месте в (9), к вектору  , стоящему на втором месте, определяем по поступательному движению винта направление третьего вектора
, стоящему на втором месте, определяем по поступательному движению винта направление третьего вектора  , см. рис. 5.
, см. рис. 5.
 (10)
(10) , тогда (8) примет вид:
, тогда (8) примет вид: 
 (11)
(11) , (12)
, (12) - есть среднее угловое ускорение.
- есть среднее угловое ускорение. (13)
(13) сонаправлен с вектором угловой скости при
сонаправлен с вектором угловой скости при  и противоположен ему при
и противоположен ему при  , см. рис 6.
, см. рис 6.