|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Описание блоков, используемых в работеСтр 1 из 2Следующая ⇒
Содержание
1. Система MATLAB.. 2 1.1. Кратко о системе. 2 1.2. О Simulink. 2 1.3. Описание блоков, используемых в работе. 3 2. Решение системы дифференциальных уравнений 2 порядка. 4 2.1. Недиссипативная система. 4 2.1.1. Введение. 4 2.1.2. Описание выполняемых операций. 5 2.1.3. Фазовая плоскость. 13 2.1.3.1. Предисловие. 13 2.1.3.2. Построение фазовой плоскости. 13 2.2. Диссипативная система. 16 2.2.1. Введение. 16 2.2.2. Описание выполняемых операций. 16 3. Система GBB1005 Ball& Beam Educational Control System («Шар и желоб») 22 3.1. Введение. 22 3.2. Кратко о системе. 22 3.3. Вывод уравнения движения системы.. 23 3.4. Уравнения возмущённого движения. 26 3.4.1 Задание положения равновесия. 26 3.4.2. Введение возмущений. 27 3.5. Расчёт коэффициентов управления. 28 3.6. Построение схемы решения. 31
Система MATLAB
Кратко о системе
Компьютерная алгебра - новое научное направление в информатике. Его появление тесно связано с созданием универсальных математических программных средств символьной математики, таких как Mathematica, Maple, Derive, Mathcad, MATLAB, Python и др. Каждая из этих систем имеет свои особенности. В них имеется свой язык общения, наборы математических функций, алгоритмы и методы решения математических задач. Уникальность системы MATLAB определяется следующими ее особенностями: · • система ориентирована на матричные операции; · • наличие большого числа библиотечных функций, делающих ее одновременно специализированной математической системой, предназначенной для решения ряда научных и инженерных задач (анализ и синтез систем управления, теория нечетких множеств, планирование эксперимента и многих других задач); · • возможность диалога с другими математическими системами (Maple, Mathcad, MS Excel) расширяет возможности MATLAB, ликвидирует один из ее недостатков — слабую, по сравнению с другими системами, символьную математику. В результате этих особенностей MATLAB — одна из наиболее мощных математических систем, пользующаяся большой популярностью пользователей. При проведении лабораторных работ по общетехническим и специальным дисциплинам, требующим элементов научных исследований, без универсальных программных систем не обойтись. Здесь будет полезна система MATLAB. MATLAB – это интерактивная система, в которой основным элементом данных является массив, что позволяет решать задачи, связанные с техническими вычислениями. Основными элементами данных для этой системы являются матрицы и вектора, с которыми можно проводить различные вычисления в несколько раз быстрее, чем на таких «скалярных» языках программирования, как Си и Фортран. MATLAB развивался в течение нескольких лет, ориентируясь на различных пользователей. В университетской среде он представлял собой стандартный инструмент для работы в различных областях математики, машиностроении и науки. В промышленности, MATLAB – это инструмент для высокопродуктивных исследований, проектных разработок и анализа данных. Систему MATLAB целесообразно использовать при обработке результатов лабораторных работ по любому из предметов, где они проводятся.
О Simulink
Simulink – это сопутствующая MATLAB программа, предназначенная для моделирования динамических систем. Она состоит из блоков, которые перетаскиваются на экран и с ними делаются различные манипуляции. Следует иметь ввиду, что во время перетаскивания иконок в процессоре происходит компиляция соответствующей программы. В этой работе будет представлено моделирование нелинейной системы с помощью данной программы, точнее, будет представлена структурная схема рассматриваемой системы.
Описание блоков, используемых в работе
В данном разделе приведено описание тех блоков, которые используются при выполнении данной лабораторной работы.
Недиссипативная система. Введение
Рассмотрим решение системы дифференциальных уравнений 2 порядка. Для примера возьмём систему следующего вида
которая является модификацией системы
Система (2.2) представляет собой уравнение колебательной системы, в котором отсутствует диссипативный член, за который должна отвечать первая производная по координате. Решение последней системы имеет вид
Таким образом решение данной системы уравнений представляется в виде графиков тригонометрических функций. Поскольку мы имеем дело с системой дифференциальных уравнений 2 порядка, то нам необходимо будет дважды выполнить операцию интегрирования. Для начала запишем систему (1) в матричном виде
Таким образом, матрица P системы имеет вид
Управляющее воздействие в системе отсутствует, поэтому матрица управления нулевая. Для интегрирования системы (1) необходимо задать начальные условия. Поскольку система (1) имеет 2 различных решения, а её общее решение представляется их линейной комбинацией (3), то, соответственно, каждое из решений можно представить так
и, подставляя в (6)
Фазовая плоскость Предисловие
В данном разделе будет рассмотрено построение фазовой плоскости для уравнения 2 порядка. Иначе говоря, мы можем построить графическую зависимость одной переменной от другой.
Диссипативная система
Введение
Примером диссипативной системы может быть следующая система уравнений
которая является модификацией системы
Эта система отличается от системы (2.2) наличием диссипативного члена, выражаемого первой производной. Решение этой системы будет экспоненциально убывать (см. 2.10) по сравнению с (2.3)
Представим систему (2.8) в матричном виде
т. е. матрица P системы (2.11) принимает вид
Управление в системе отсутствует, а начальные условия аналогичны условиям (2.7).
Введение
В предыдущем разделе была рассмотрена система дифференциальных уравнений 2 порядка. Материал предыдущего раздела являеся ознакомительным. В данном разделе будет рассмотрена система GBB1005 Ball& Beam Educational Control System («Шар и желоб») с подробным выводом системы уравнений её движения в возмущённом и невозмущённом виде. Будет также построена схема решения системы уравнений движения системы с подробным объяснением каждого момента построения.
Кратко о системе Общий вид устройства системы показан на рис. 3.1:
Рис. 3.1. Функциональные компоненты механической части.
Механическая часть состоит из: основания, желоба, шарика, плеча рычага, колеса, поддерживающей стойки, двигателя и встроенного источника питания. Шарик может катиться свободно по всей длине желоба. Желоб присоединен к неподвижной поддерживающей стойке с одной стороны и к подвижному рычагу с другой. Движения рычага управляется щеточным двигателем постоянного тока через колесо. Двигатель оснащен встроенным датчиком поворота, который придает информацию по линии обратной связи о текущем положении (угле поворота) якоря двигателя. В прорезе вдоль всей длины желоба находится потенциометр, который снимает информацию о текущем положении шарика на желобе. Обе измеренные позиции направляются по линии обратной связи в систему управления, таким образом, организуется замкнутая система управления. Как только колесо сервопривода повернется на угол theta, рычаг изменит угол желоба alpha. Когда желоб уйдет из горизонтального положения сила гравитации заставит шарик катиться вдоль желоба. Вращение якоря двигателя управляется интеллектуальным приводом. Это высокоточный, полностью цифровой сервопривод со встроенным интеллектом и 100 ваттным усилителем, пригодным для использования с щеточными и бесщеточными двигателями. Основываясь на информации, идущей по цепи обратной связи с датчиков, он рассчитывает и затем, применив соответствующую широтно-импульсную модуляцию, создает напряжение на обмотках двигателя, такое, что вращающий момент вращает якорь двигателя в соответствии с запрограммированным пользователем алгоритмом. Привод называется интеллектуальным, поскольку наряду со встроенным усилителем для усиления управляющего сигнала и широтно-импульсного модулятора он содержит встроенный цифровой процессор для обработки сигналов, память и цифровую логику, которые обеспечивают контроль движения и выполняют функцию программируемой логики. Процедуры формирования траектории в реальном времени, управления в сервоприводе, управляющих команд с главного компьютера и обработка сигналов выполняются внутри в соответствии с загруженной программой и командами, поступающими с главного компьютера. Это встроенная логика обеспечивает формирование управления в реальном времени, выполняемое независимо от любых задержек, связанных с работой операционной системы главного компьютера. Привод может работать как в автономном, так и в управляемом режиме. IPM 100 расположен внутри лабораторной установки и связан с компьютером высшего уровня через интерфейс RS-232. Источник постоянного тока, питающий привод, расположен также внутри этой же лабораторной установки. Пользователь программирует привод на языке высокого уровня Technosoft Motion Language (TML) в среде IPM Motion Studio запущенной на главном компьютере. Программный код и команды загружаются в привод при помощи COM порта. IPM Motion Studio - это построенная на принципе окон интегрированная среда разработки для настройки и анализа приложения формирования управления движением с использованием IPM приводов. На этой платформе легко · исследовать мотор, датчик и установить их параметры; · настраивать и регулировать обратную связь сервопривода; · построить гибкий алгоритм-программу формирования управления движением используя TML; · анализировать и оценивать поредение системы.
Задание положения равновесия
В нашем случае система уравнений допускает равновесие, в котором Будем полагать
тогда
Подставим выражения (3.12) и (3.13) в полученную систему уравнений, тогда система уравнений (3.9) и (3.11) примет вид
Решая эту систему, получаем ненулевое положение равновесия
Таким образом, мы задали невозмущённое движение для системы (3.9) и (3.11). Эти условия мы будем использовать при выводе системы уравнений возмущённого движения.
Введение возмущений. Выше мы полагали, что рассмотренные координаты постоянны. Рассмотрим возмущённое движение. Введём следующие обозначения:
где
Отбрасывая нелинейные члены, получаем линейную систему
Здесь и далее u – линейное управление, выражающееся в виде
где n = 5, а коэффициенты ki вычисляются по методу Н. Н. Красовского решения линейно-квадратичной задачи стабилизации.
Построение схемы решения
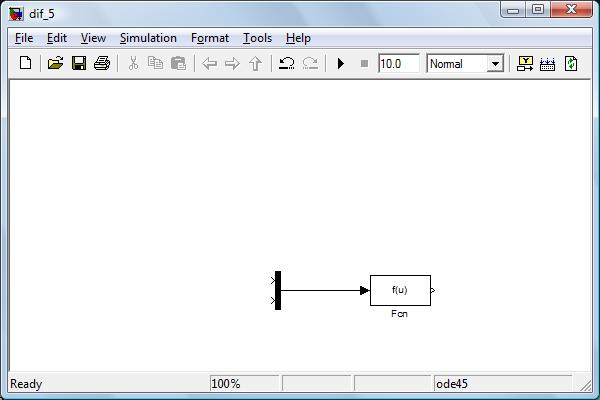
Создайте новую модель и сохраните её под именем, например, " dif_5"
Рис. 3.5. Создана новая построения системы
Прежде, чем мы начнём строить схему решения системы (3.18), запишем два последних уравнения системы в следующем виде
Таким образом, производная от четвёртой переменной системы имеет 3 параметра. Чтобы задать её, нам потребуется функциональный блок, на вход которого подаётся вектор (можно использовать и другой блок – блок задания функции с переменным количеством параметров)
Рис. 3.6. Добавлен функциональный блок
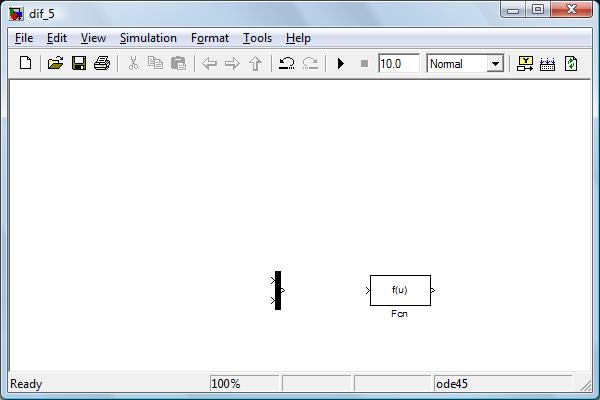
Поскольку размерность вектора равна 3 (функция имеет 3 параметра), то для задания вектора ставим соответствующий блок.
Рис. 3.7. Добавлен блок задания вектора
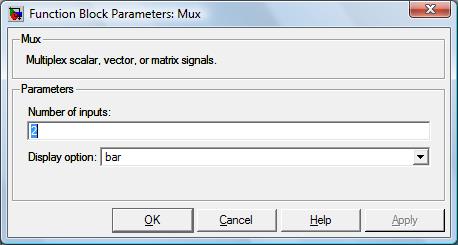
Для изменения параметров блока задания вектора дважды щёлкаем мышью по блоку – откроется окно изменения параметров блока
Рис. 3.8. Окно изменения параметров вектора
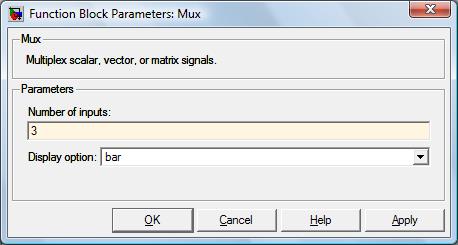
Задаём число входов блока равным 3
Рис. 3.9. Число входов вектора задано равным «3»
Соединяем блок задания вектора с функциональным блоком
Рис. 3.10. Блок задания вектора соединён с функциональным блоком
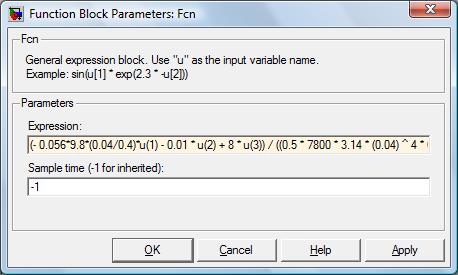
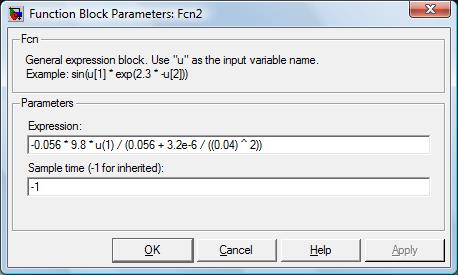
Теперь нам необходимо задать саму функцию, выражающую значение четвёртой переменной, но, прежде чем это сделать, нам необходимо задать параметры системы. Их мы берём из таблицы
Табл. 1. Физические параметры системы.
Подставляем обозначения и записываем формулу в окно изменения параметров функционального блока (см. рис. 3.7) – получаем
Рис. 3.11. Задана формула вычисления производной 4-й переменной (числа в скобках указывают номера параметров функции)
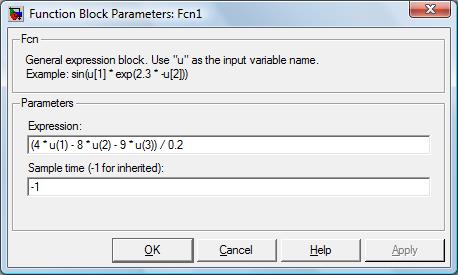
Для задания другой функции из (3.20) ставим ещё один функциональный блок и настраиваем его аналогичным образом. В тело функционального блока запишем выражение, представленное на рис.
Рис. 3.12. Задана формула вычисления производной 5-й переменной
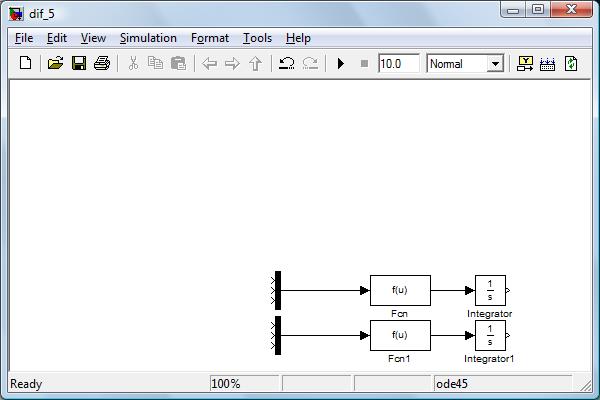
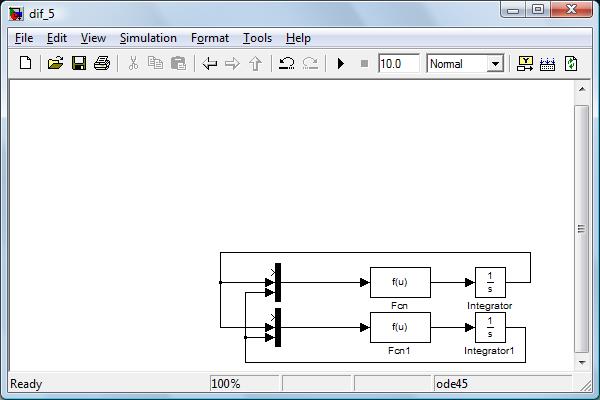
Итак, мы задали алгоритм вычисления производных от двух последних переменных. Чтобы получить значения самих переменных, необходимо проинтегрировать каждую производную – для этого необходимо каждую из этих функций пропустить через интегратор (интегрирующий блок)
Рис. 3.13. Обе производные пропущены через интеграторы
Осталось разобраться со входными параметрами построенных функций. Производная от четвёртой переменной зависит от самой четвертой переменной как производная пятой переменной зависит от пятой самой переменной. Это значит, что выходы интеграторов необходимо соединить с соответствующими входами блока задания вектора.
Рис. 3.14. Производным от переменных переданы значения самих переменных
Кроме того, производная четвёртой переменной зависит от пятой переменной, а производная пятой переменной зависит от пятой переменной, поэтому делаем соответствующие разветвления.
Рис. 3.15. Значения переменных переданы функциям наоборот
Из последнего рисунка видно, что на каждом из блоков задания вектора остался свободным только один вход. Поскольку на оставшийся вход второго блока задания вектора подаётся управляющее воздействие, задаваемое линейной функцией своих аргументов, то построение оставшихся входов начнём с построения оставшегося входа первого блока задания вектора, поскольку на этот вход должна подаваться первая переменная, а её производная равна значению второй переменной, которое получается путём интегрирования производной второй переменной, но, прежде чем провести эту операцию, зададим производную второй переменной в виде функции
В модели ставим ещё один функциональный блок и расположим его выше двух рассмотренных блоков
Рис. 3.16. Добавлен третий функциональный блок
В тело добавленного блока с учётом табл. 1 запишем
Рис. 3.17. Записана формула в тело третьего функционального блока
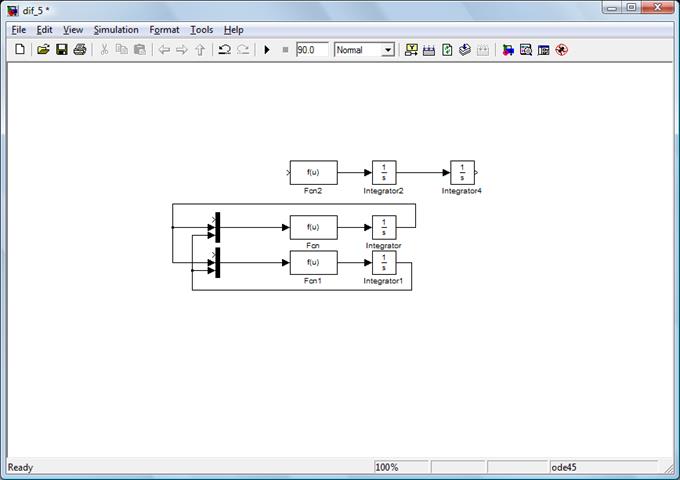
и проинтегрируем, пропустив выходное значение последнего рассмотренного функционального блока через интегратор
Рис. 3.18. Проинтегрировано выходное значение третьего функционального блока
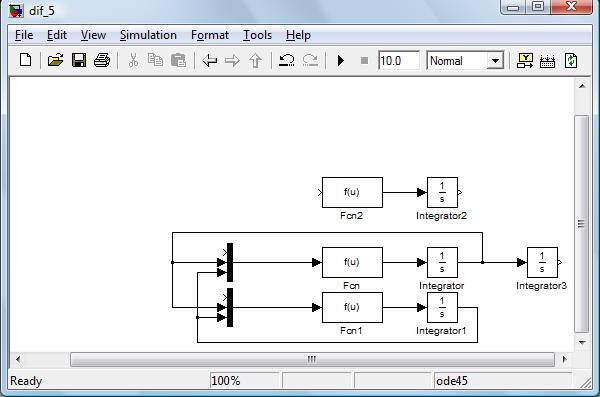
Но построенная модель по-прежнему остаётся незамкнутой. На вход последнего рассмотренного функционального блока необходимо подать значение третьей переменной, а поскольку производная четвёртой переменной равна значению третьей переменной (см. (3.20)), то необходимо сделать соответствующее разветвление и проинтегрировать четвёртую переменную для получения значения третьей переменной
Рис. 3.19. Проинтегрирована четвёртая переменная
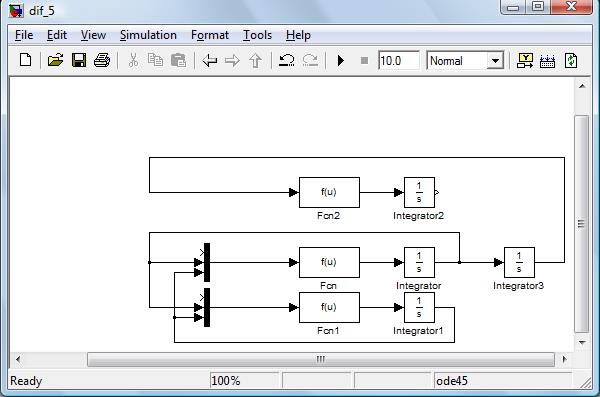
и подать его на вход самого верхнего функционального блока
Рис. 3.20. Значение третьей переменной подано на вход третьего функционального блока
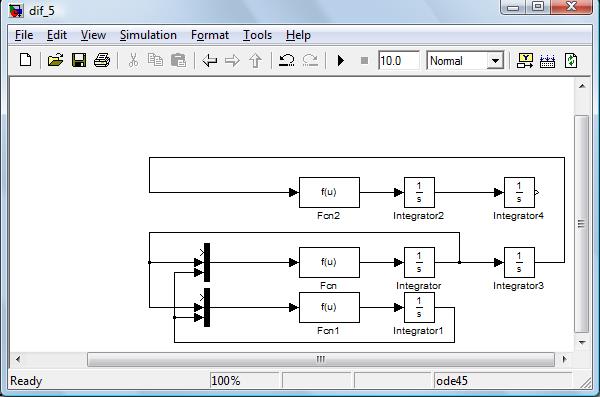
Напомним, что производная первой переменной равна значению второй переменной. Для получения значения первой переменной интегрируем вторую переменную
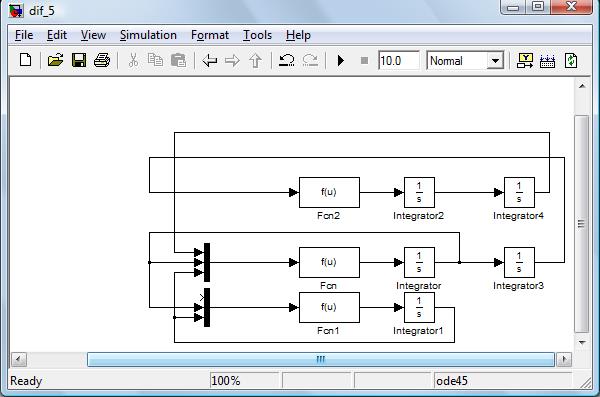
Рис. 3.21. Получено значение первой переменной и подаём её на оставшийся вход первого блока задания вектора
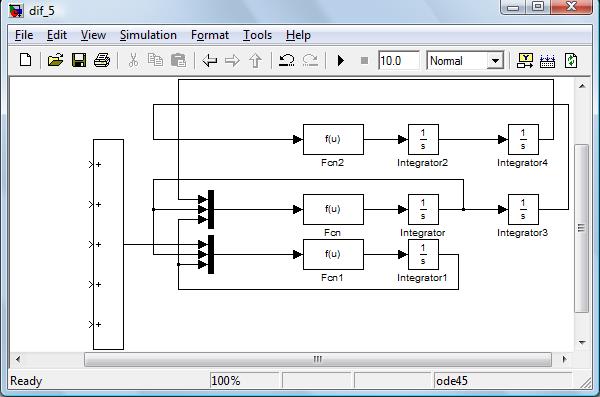
Рис. 3.22. Первая переменная подана на вход первого блока задания вектора Нам осталось построить только первый вход второго блока задания вектора. На этот вход подаётся управление (см. (3.20)), а поскольку управление является линейной функцией своих аргументов, то на данный вход должен подаваться результат суммирования пяти элементов (мы имеем дело с системой пятого порядка)
Рис. 3.23. Добавлен сумматор
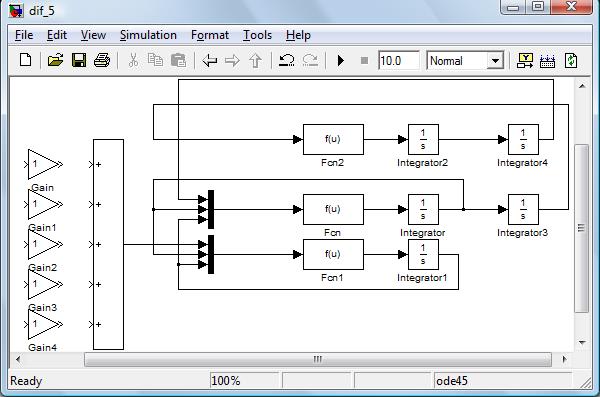
Каждая переменная домножается на соответствующий коэффициент управления, поэтому нам необходимо ввести пять операторов домножения
Рис. 3.24. Добавлены операторы домножения
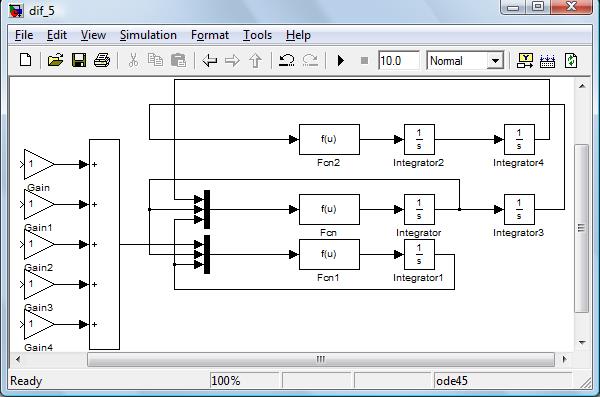
и соединить их со входами сумматора
Рис. 3.25. Операторы домножения соединены со входами сумматора
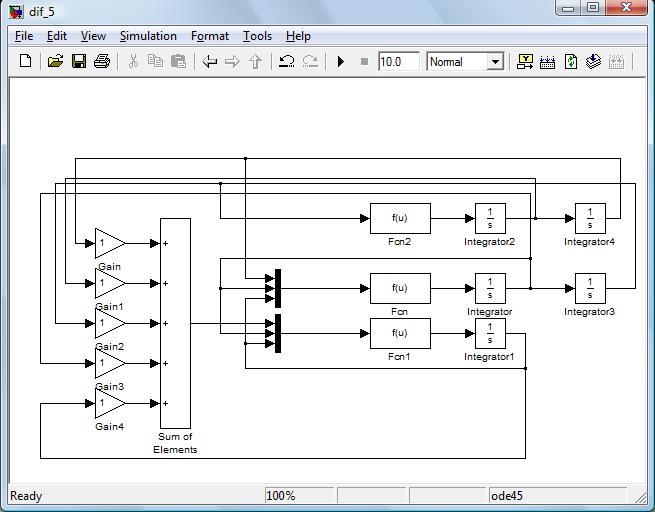
а на вход каждого оператора домножения подать соответствующие значения переменных
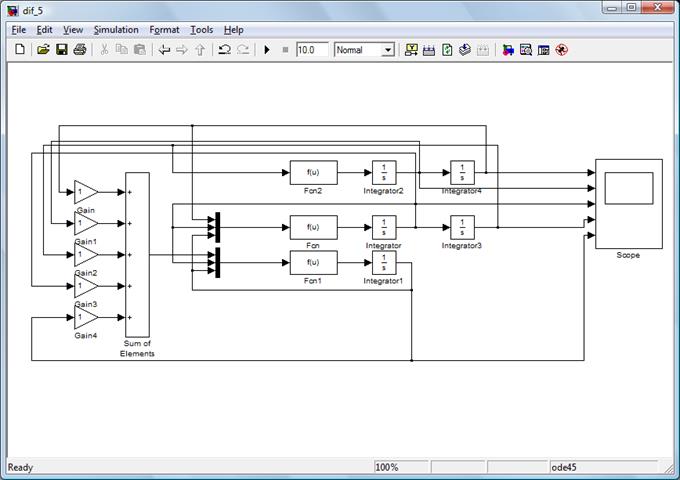
Рис. 3.26. Построены входы операторов домножения
Выведем на экран графические зависимости переменных системы
Рис. 3.27. Выведены на экран графические характеристики
Прежде чем проинтегрировать систему, необходимо задать положение равновесия. Математически оно получено в виде (3.15). Подставляя (3.15) в (3.16) и учитывая равенство нулю всех координат и их производных мы получаем
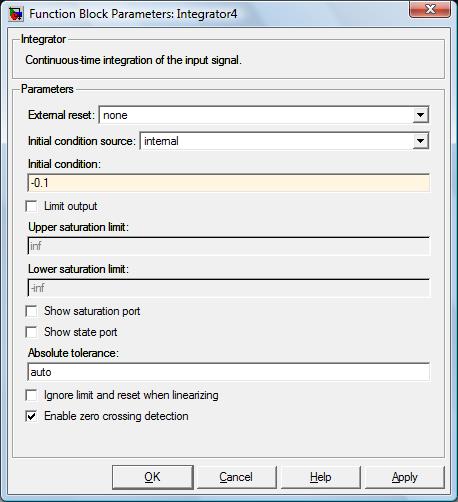
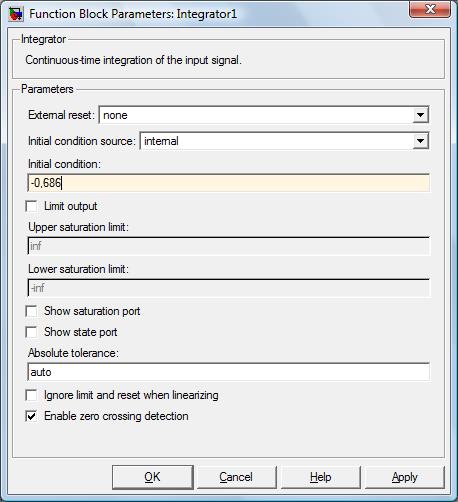
Чтобы задать эти параметры, открываем окна изменения параметров соответствующих интеграторов (изменяем параметры только тех интеграторов, на выходе которых находятся первая и пятая переменные соответственно)
Рис. 3.28. Задано начальное условие первой переменной
Рис. 3.29. Задано начальное условие пятой переменной
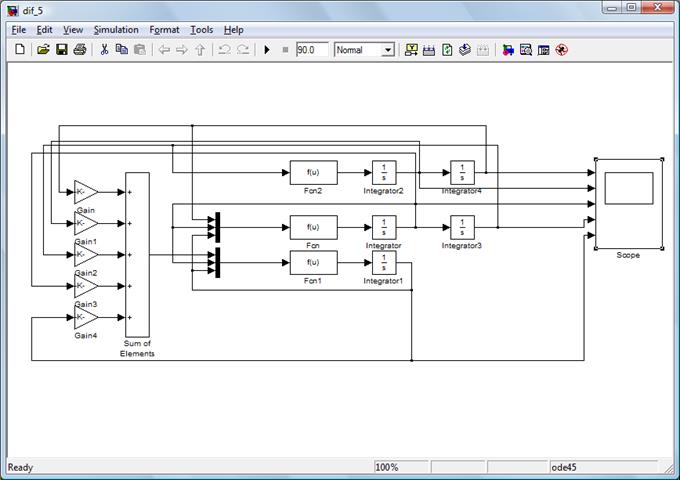
Теперь нам необходимо разобраться с коэффициентами управления. Из окна программы вычисления коэффициентов управления копируем значения полученных коэффициентов в соответствующие окна настроек параметров операторов домножения – в результате система примет вид
Рис. 3.30. Заданы коэффициенты управления
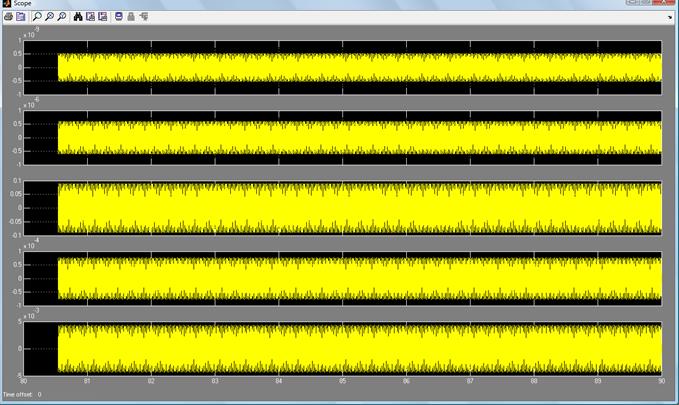
После задания положения равновесия и коэффициентов управления мы можем запустить систему на выполнение, в результате чего мы получаем её графические характеристики.Эти графические зависимости имеют вид
Рис. 3.31. Построено графическое решение системы
Построение системы закончено.
Содержание
1. Система MATLAB.. 2 1.1. Кратко о системе. 2 1.2. О Simulink. 2 1.3. Описание блоков, используемых в работе. 3 2. Решение системы дифференциальных уравнений 2 порядка. 4 2.1. Недиссипативная система. 4 2.1.1. Введение. 4 2.1.2. Описание выполняемых операций. 5 2.1.3. Фазовая плоскость. 13 2.1.3.1. Предисловие. 13 2.1.3.2. Построение фазовой плоскости. 13 2.2. Диссипативная система. 16 2.2.1. Введение. 16 2.2.2. Описание выполняемых операций. 16 3. Система GBB1005 Ball& Beam Educational Control System («Шар и желоб») 22 3.1. Введение. 22 3.2. Кратко о системе. 22 3.3. Вывод уравнения движения системы.. 23 3.4. Уравнения возмущённого движения. 26 3.4.1 Задание положения равновесия. 26 3.4.2. Введение возмущений. 27 3.5. Расчёт коэффициентов управления. 28 3.6. Построение схемы решения. 31
Система MATLAB
Кратко о системе
Компьютерная алгебра - новое научное направление в информатике. Его появление тесно связано с созданием универсальных математических программных средств символьной математики, таких как Mathematica, Maple, Derive, Mathcad, MATLAB, Python и др. Каждая из этих систем имеет свои особенности. В них имеется свой язык общения, наборы математических функций, алгоритмы и методы решения математических задач. Уникальность системы MATLAB определяется следующими ее особенностями: · • система ориентирована на матричные операции; · • наличие большого числа библиотечных функций, делающих ее одновременно специализированной математической системой, предназначенной для решения ряда научных и инженерных задач (анализ и синтез систем управления, теория нечетких множеств, планирование эксперимента и многих других задач); · • возможность диалога с другими математическими системами (Maple, Mathcad, MS Excel) расширяет возможности MATLAB, ликвидирует один из ее недостатков — слабую, по сравнению с другими системами, символьную математику. В результате этих особенностей MATLAB — одна из наиболее мощных математических систем, пользующаяся большой популярностью пользователей. При проведении лабораторных работ по общетехническим и специальным дисциплинам, требующим элементов научных исследований, без универсальных программных систем не обойтись. Здесь будет полезна система MATLAB. MATLAB – это интерактивная система, в которой основным элементом данных является массив, что позволяет решать задачи, связанные с техническими вычислениями. Основными элементами данных для этой системы являются матрицы и вектора, с которыми можно проводить различные вычисления в несколько раз быстрее, чем на таких «скалярных» языках программирования, как Си и Фортран. MATLAB развивался в течение нескольких лет, ориентируясь на различных пользователей. В университетской среде он представлял собой стандартный инструмент для работы в различных областях математики, машиностроении и науки. В промышленности, MATLAB – это инструмент для высокопродуктивных исследований, проектных разработок и анализа данных. Систему MATLAB целесообразно использовать при обработке результатов лабораторных работ по любому из предметов, где они проводятся.
О Simulink
Simulink – это сопутствующая MATLAB программа, предназначенная для моделирования динамических систем. Она состоит из блоков, которые перетаскиваются на экран и с ними делаются различные манипуляции. Следует иметь ввиду, что во время перетаскивания иконок в процессоре происходит компиляция соответствующей программы. В этой работе будет представлено моделирование нелинейной системы с помощью данной программы, точнее, будет представлена структурная схема рассматриваемой системы.
Описание блоков, используемых в работе
В данном разделе приведено описание тех блоков, которые используются при выполнении данной лабораторной работы.
Недиссипативная система. Введение
Рассмотрим решение системы дифференциальных уравнений 2 порядка. Для примера возьмём систему следующего вида
которая является модификацией системы
Система (2.2) представляет собой уравнение колебательной системы, в котором отсутствует диссипативный член, за который должна отвечать первая производная по координате. Решение последней системы имеет вид
Таким образом решение данной системы уравнений представляется в виде графиков тригонометрических функций. Поскольку мы имеем дело с системой дифференциальных уравнений 2 порядка, то нам необходимо будет дважды выполнить операцию интегрирования. Для начала запишем систему (1) в матричном виде
Таким образом, матрица P системы имеет вид
Управляющее воздействие в системе отсутствует, поэтому матрица управления нулевая. Для интегрирования системы (1) необходимо задать начальные условия. Поскольку система (1) имеет 2 различных решения, а её общее решение представляется их линейной комбинацией (3), то, соответственно, каждое из решений можно представить так
и, подставляя в (6)
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 270; Нарушение авторского права страницы







 (2.1)
(2.1) (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4) (2.5)
(2.5) (2.6)
(2.6) получаем начальные условия
получаем начальные условия (2.7)
(2.7) (2.8)
(2.8) (2.9)
(2.9) (2.10)
(2.10) (2.11)
(2.11) (2.12)
(2.12)
 .
. (3.12)
(3.12) (3.13)
(3.13) (3.14)
(3.14) (3.15)
(3.15) (3.16)
(3.16) - возмущения. Подставляя эти обозначения в (3.9), (3.11), получаем следующую систему дифференциальных уравнений возмущённого движения в нормальной форме:
- возмущения. Подставляя эти обозначения в (3.9), (3.11), получаем следующую систему дифференциальных уравнений возмущённого движения в нормальной форме:  (3.17)
(3.17) (3.18)
(3.18) (3.19)
(3.19)
 (3.33)
(3.33)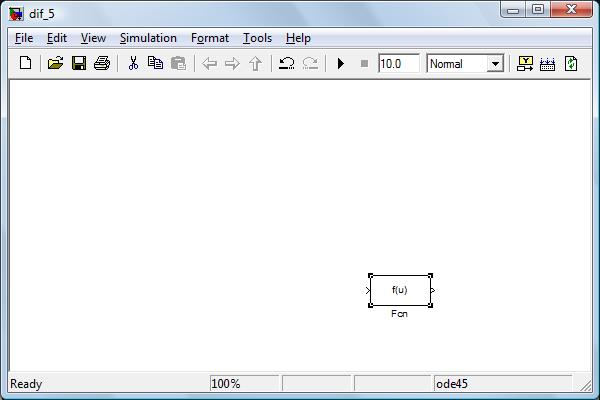

 (3.34)
(3.34)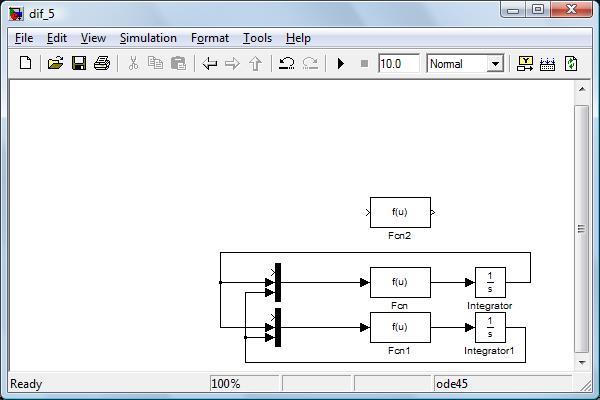
 (3.22)
(3.22)