|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчёт коэффициентов управления ⇐ ПредыдущаяСтр 2 из 2
Для однозначного определения стабилизирующего управления будем использовать метод Н. Н. Красовского решения линейно-квадратичной задачи стабилизации. Для системы
требуется найти линейное стабилизирующее управление
чтобы действительные части корней характеристического уравнения матрицы
были отрицательны. За управляющее воздействие взята добавка к напряжению
Условие управляемости
гарантирует разрешимость задачи стабилизации по первому приближению методом Н. Н. Красовского. Этот метод состоит в том, что по критерию
нужно найти
Как известно из принципа оптимальности Беллмана и теоремы Красовского оптимальным может быть управление, минимизирующее выражение
причём этот минимум равен нулю. Из
находим оптимальное управление
После подстановки этого управления в (7.8) и приравнивания к нулю соответствующей квадратичной формы получаем уравнение Ляпунова – Беллмана - Риккати
Показано (Репин – Третьяков(1963), Николсон – Уатт(1979)), что решение этого уравнения является пределом решения уравнения
где γ (t) – решение уравнения
Для интегрирования этой системы реализована оригинальная процедура метода Рунге – Кутта 4 порядка. Заметим, что в отличие от стандартной процедуры здесь предусмотрена возможность счёта при задании разной длины шага по разным переменным. Программа протестирована для решения задачи системы уравнений 3 порядка из книги Малкина И. Г.. Если шаги одинаковы и маленькие, то значения полностью совпадают до 3 знака. Результат применения этой процедуры для уравнения 15 порядка показан на рис.3.3.
Рис.3.3. Значения матрицы С функции Ляпунова.
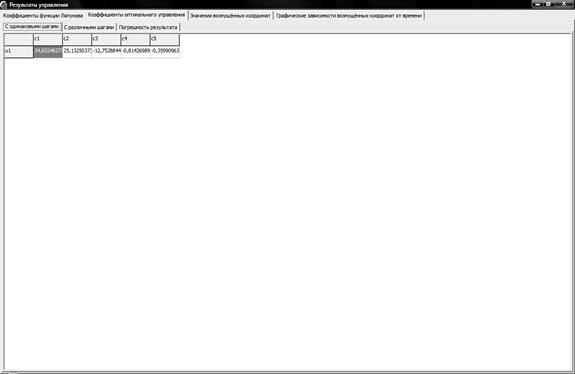
Значения коэффициентов оптимального управления показаны на риc.3.4
Рис. 3.4. Значения коэффициентов управления.
Построение схемы решения
Создайте новую модель и сохраните её под именем, например, " dif_5"
Рис. 3.5. Создана новая построения системы
Прежде, чем мы начнём строить схему решения системы (3.18), запишем два последних уравнения системы в следующем виде
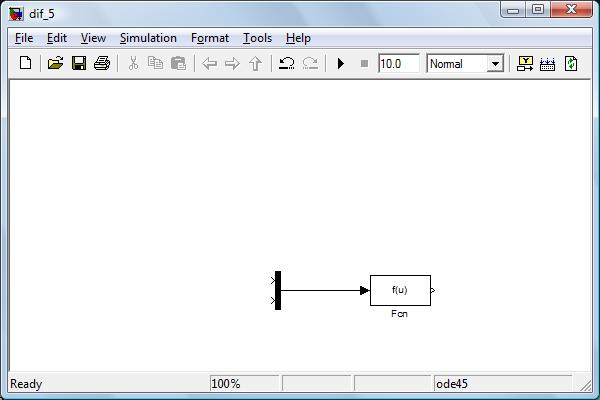
Таким образом, производная от четвёртой переменной системы имеет 3 параметра. Чтобы задать её, нам потребуется функциональный блок, на вход которого подаётся вектор (можно использовать и другой блок – блок задания функции с переменным количеством параметров)
Рис. 3.6. Добавлен функциональный блок
Поскольку размерность вектора равна 3 (функция имеет 3 параметра), то для задания вектора ставим соответствующий блок.
Рис. 3.7. Добавлен блок задания вектора
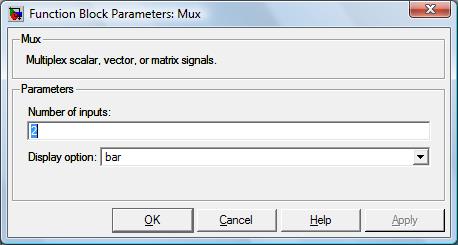
Для изменения параметров блока задания вектора дважды щёлкаем мышью по блоку – откроется окно изменения параметров блока
Рис. 3.8. Окно изменения параметров вектора
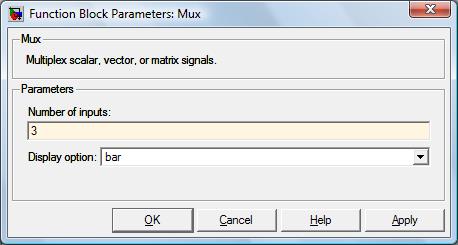
Задаём число входов блока равным 3
Рис. 3.9. Число входов вектора задано равным «3»
Соединяем блок задания вектора с функциональным блоком
Рис. 3.10. Блок задания вектора соединён с функциональным блоком
Теперь нам необходимо задать саму функцию, выражающую значение четвёртой переменной, но, прежде чем это сделать, нам необходимо задать параметры системы. Их мы берём из таблицы
Табл. 1. Физические параметры системы.
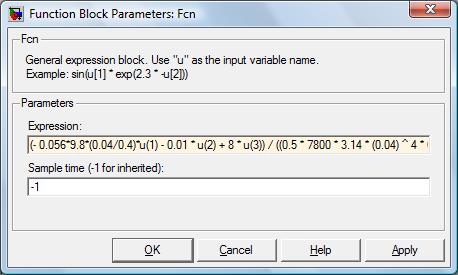
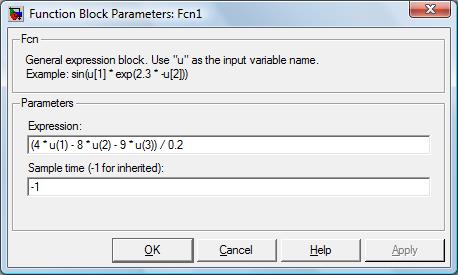
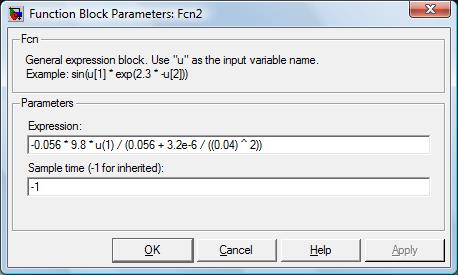
Подставляем обозначения и записываем формулу в окно изменения параметров функционального блока (см. рис. 3.7) – получаем
Рис. 3.11. Задана формула вычисления производной 4-й переменной (числа в скобках указывают номера параметров функции)
Для задания другой функции из (3.20) ставим ещё один функциональный блок и настраиваем его аналогичным образом. В тело функционального блока запишем выражение, представленное на рис.
Рис. 3.12. Задана формула вычисления производной 5-й переменной
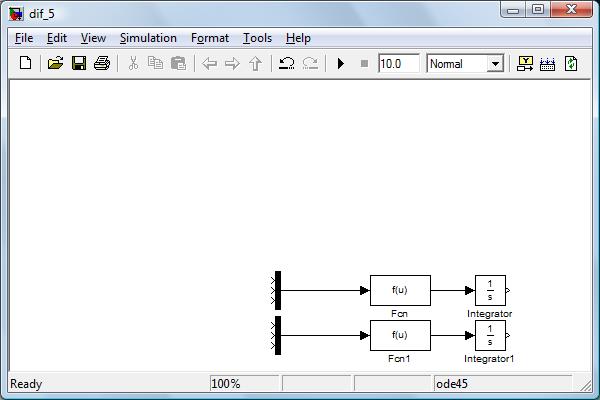
Итак, мы задали алгоритм вычисления производных от двух последних переменных. Чтобы получить значения самих переменных, необходимо проинтегрировать каждую производную – для этого необходимо каждую из этих функций пропустить через интегратор (интегрирующий блок)
Рис. 3.13. Обе производные пропущены через интеграторы
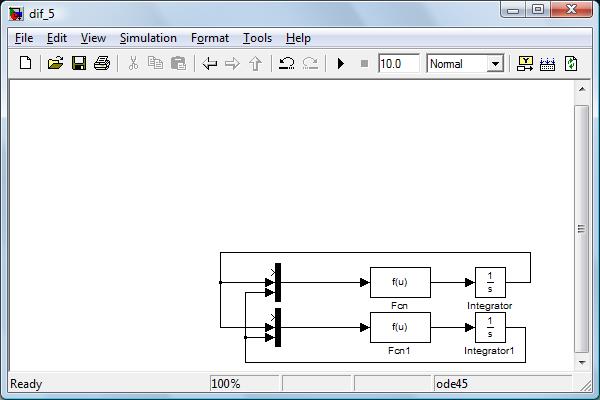
Осталось разобраться со входными параметрами построенных функций. Производная от четвёртой переменной зависит от самой четвертой переменной как производная пятой переменной зависит от пятой самой переменной. Это значит, что выходы интеграторов необходимо соединить с соответствующими входами блока задания вектора.
Рис. 3.14. Производным от переменных переданы значения самих переменных
Кроме того, производная четвёртой переменной зависит от пятой переменной, а производная пятой переменной зависит от пятой переменной, поэтому делаем соответствующие разветвления.
Рис. 3.15. Значения переменных переданы функциям наоборот
Из последнего рисунка видно, что на каждом из блоков задания вектора остался свободным только один вход. Поскольку на оставшийся вход второго блока задания вектора подаётся управляющее воздействие, задаваемое линейной функцией своих аргументов, то построение оставшихся входов начнём с построения оставшегося входа первого блока задания вектора, поскольку на этот вход должна подаваться первая переменная, а её производная равна значению второй переменной, которое получается путём интегрирования производной второй переменной, но, прежде чем провести эту операцию, зададим производную второй переменной в виде функции
В модели ставим ещё один функциональный блок и расположим его выше двух рассмотренных блоков
Рис. 3.16. Добавлен третий функциональный блок
В тело добавленного блока с учётом табл. 1 запишем
Рис. 3.17. Записана формула в тело третьего функционального блока
и проинтегрируем, пропустив выходное значение последнего рассмотренного функционального блока через интегратор
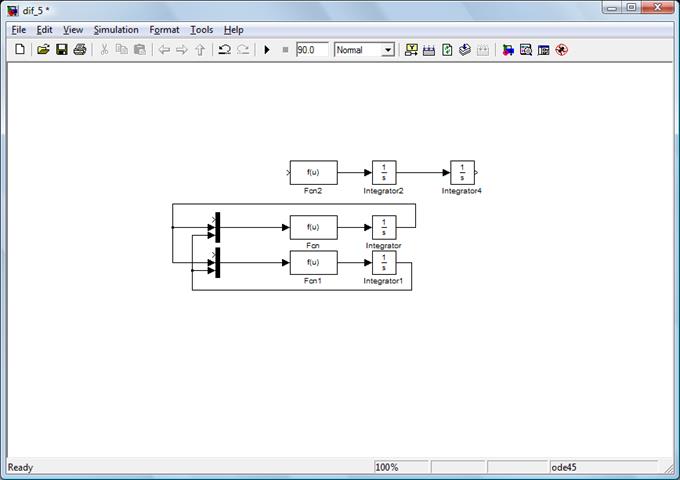
Рис. 3.18. Проинтегрировано выходное значение третьего функционального блока
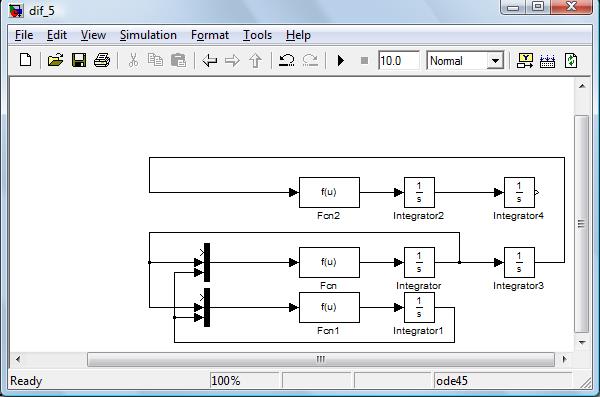
Но построенная модель по-прежнему остаётся незамкнутой. На вход последнего рассмотренного функционального блока необходимо подать значение третьей переменной, а поскольку производная четвёртой переменной равна значению третьей переменной (см. (3.20)), то необходимо сделать соответствующее разветвление и проинтегрировать четвёртую переменную для получения значения третьей переменной
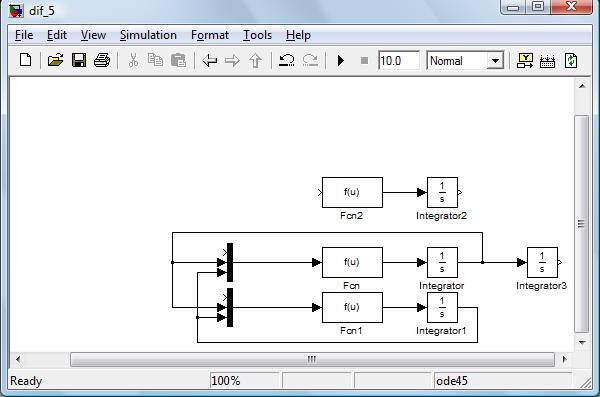
Рис. 3.19. Проинтегрирована четвёртая переменная
и подать его на вход самого верхнего функционального блока
Рис. 3.20. Значение третьей переменной подано на вход третьего функционального блока
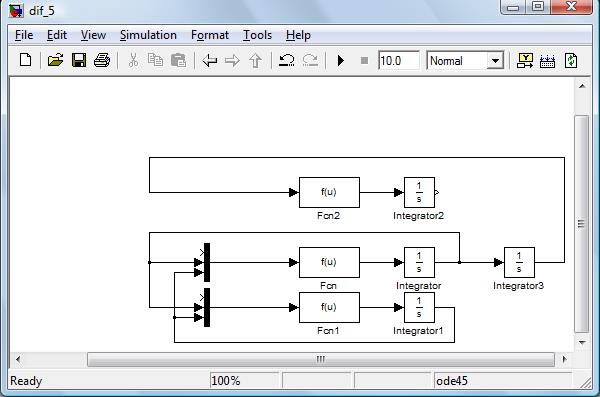
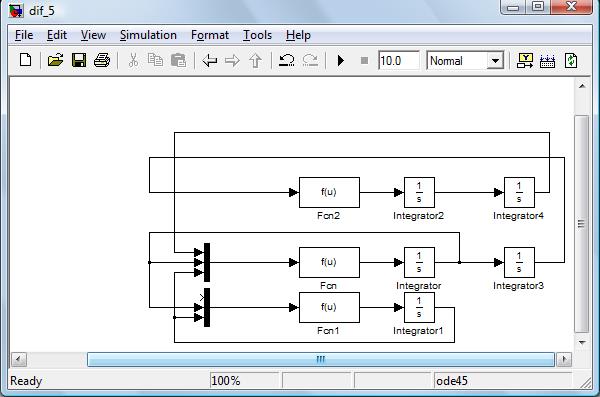
Напомним, что производная первой переменной равна значению второй переменной. Для получения значения первой переменной интегрируем вторую переменную
Рис. 3.21. Получено значение первой переменной и подаём её на оставшийся вход первого блока задания вектора
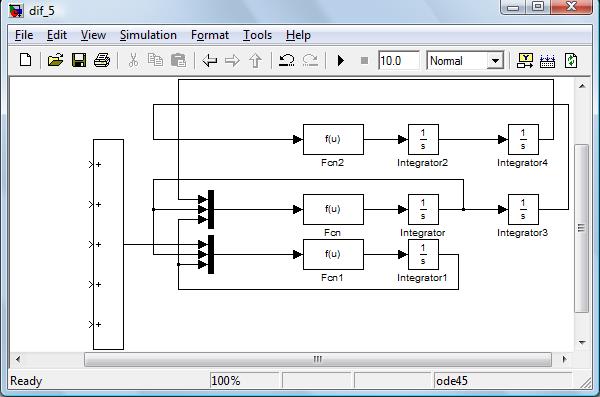
Рис. 3.22. Первая переменная подана на вход первого блока задания вектора Нам осталось построить только первый вход второго блока задания вектора. На этот вход подаётся управление (см. (3.20)), а поскольку управление является линейной функцией своих аргументов, то на данный вход должен подаваться результат суммирования пяти элементов (мы имеем дело с системой пятого порядка)
Рис. 3.23. Добавлен сумматор
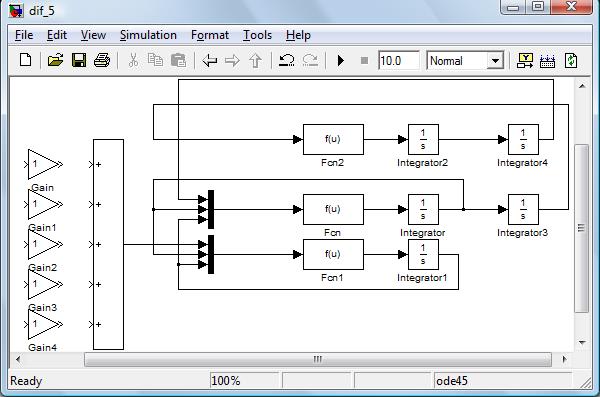
Каждая переменная домножается на соответствующий коэффициент управления, поэтому нам необходимо ввести пять операторов домножения
Рис. 3.24. Добавлены операторы домножения
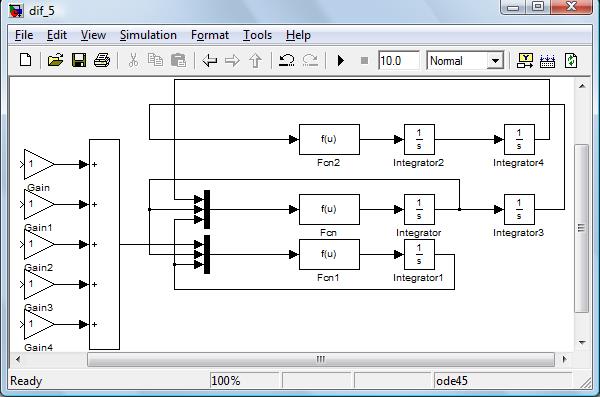
и соединить их со входами сумматора
Рис. 3.25. Операторы домножения соединены со входами сумматора
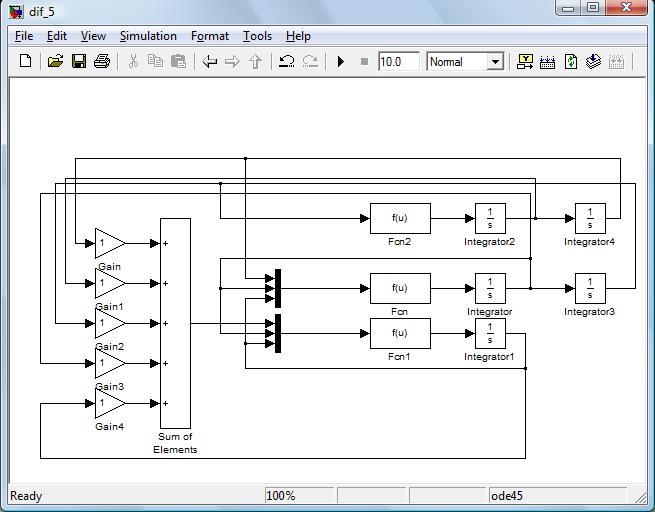
а на вход каждого оператора домножения подать соответствующие значения переменных
Рис. 3.26. Построены входы операторов домножения
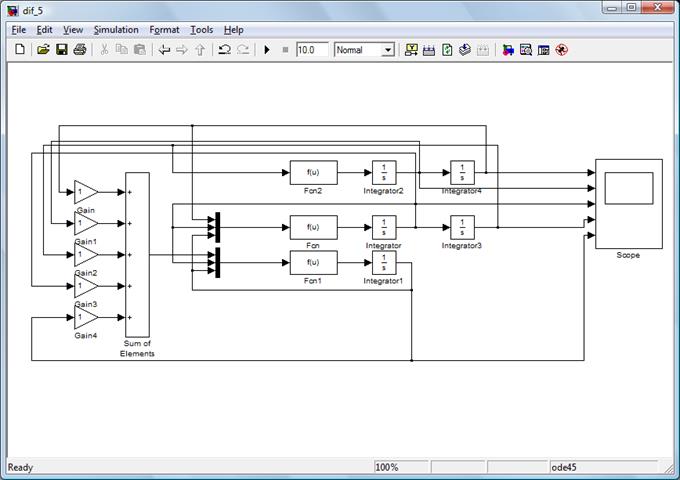
Выведем на экран графические зависимости переменных системы
Рис. 3.27. Выведены на экран графические характеристики
Прежде чем проинтегрировать систему, необходимо задать положение равновесия. Математически оно получено в виде (3.15). Подставляя (3.15) в (3.16) и учитывая равенство нулю всех координат и их производных мы получаем
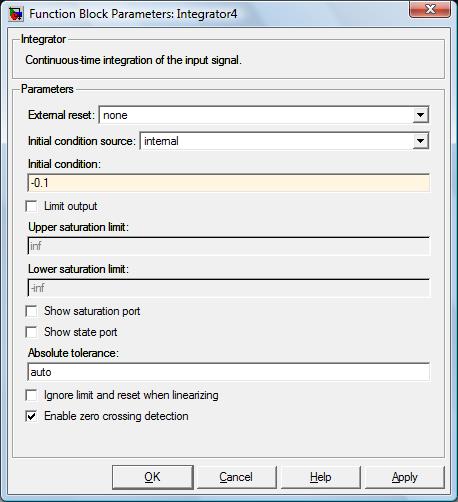
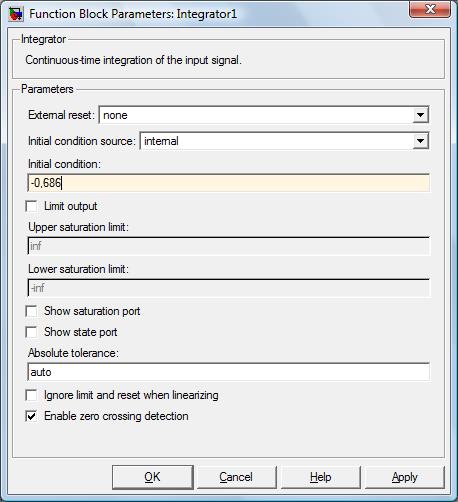
Чтобы задать эти параметры, открываем окна изменения параметров соответствующих интеграторов (изменяем параметры только тех интеграторов, на выходе которых находятся первая и пятая переменные соответственно)
Рис. 3.28. Задано начальное условие первой переменной
Рис. 3.29. Задано начальное условие пятой переменной
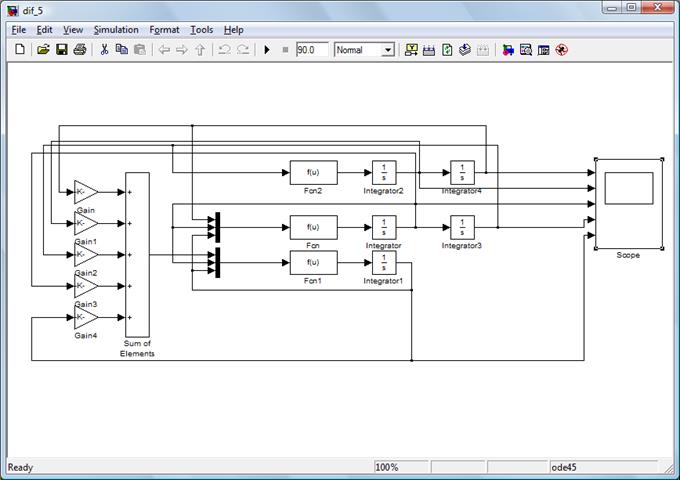
Теперь нам необходимо разобраться с коэффициентами управления. Из окна программы вычисления коэффициентов управления копируем значения полученных коэффициентов в соответствующие окна настроек параметров операторов домножения – в результате система примет вид
Рис. 3.30. Заданы коэффициенты управления
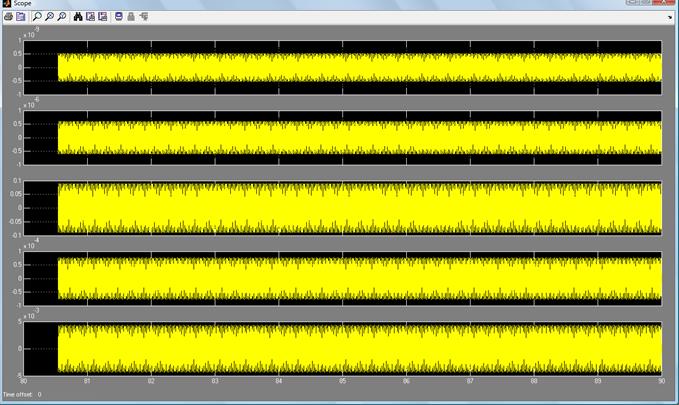
После задания положения равновесия и коэффициентов управления мы можем запустить систему на выполнение, в результате чего мы получаем её графические характеристики.Эти графические зависимости имеют вид
Рис. 3.31. Построено графическое решение системы
Построение системы закончено.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 393; Нарушение авторского права страницы
 (3.20)
(3.20) (3.21)
(3.21) (3.22)
(3.22) (3.23)
(3.23) (3.24)
(3.24) (3.25)
(3.25) (3.26)
(3.26) (3.27)
(3.27) (3.28)
(3.28) (3.29)
(3.29) (3.30)
(3.30) (3.31)
(3.31) (3.32)
(3.32)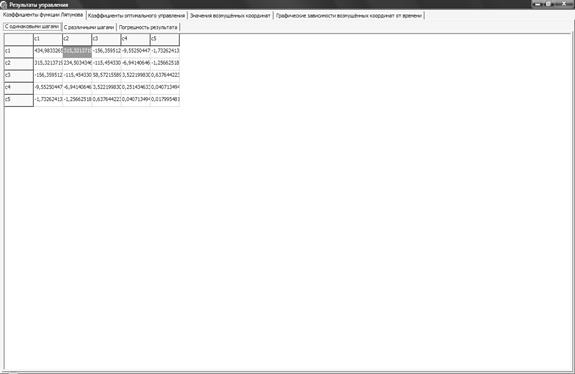
 (3.33)
(3.33)

 (3.34)
(3.34)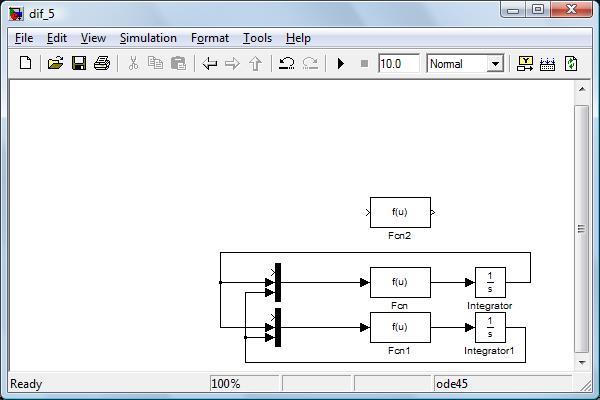
 (3.22)
(3.22)