|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Поступательное движение твердого телаСтр 1 из 4Следующая ⇒
ОСНОВНЫЕ ПОНЯТИЯ КИНЕМАТИКИ ТОЧКИ Способы задания движения точки При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
При координатном способе задания движения задаются координаты точки как функции времени:
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t. При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна. ____________________________________________________ Естественный способ задания движения точки
Рисунок 1.4 На рисунке 1.4: τ -орт касательной; n -орт нормали; b -орт бинормали; При естественном способе задания движения предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении.
Единичные орты τ , n, b определяют направление соответствующих осей в каждой точке кривой.
Рисунок 1.5
Чтобы задать закон движения точки естественным способом необходимо: 1) знать траекторию движения; 2) установить начало отсчета на этой кривой; 3) установить положительное направление движения; 4) дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪ OM=S(t). Зная эти параметры можно найти все кинематические характеристики точки в любой момент времени (рисунок 1.5).
Скорость точки определяется по формулам (1.9) V=τ ⋅ dS/dt, V=dS/dt . (1.9)
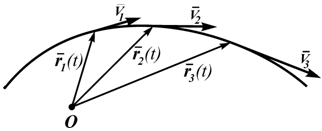
Первая формула определяет величину и направление вектора скорости, вторая формула только величину. Кинематика точки 1.1 Способы задания закона движения точки Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения. В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки. 1.1.1 Векторный способ задания движения точки В этом случае положение точки на плоскости или в пространстве определяется вектором-функцией r=r(t) (1.1)
Рисунок 1.1
Этот вектор откладывается от неподвижной точки, выбранной за начало отсчета, его конец определяет положение движущейся точки. Годограф r, т.е. положение концов этого вектора в пространстве, определяет траекторию движущейся точки. Ее скорость в этом случае определяется как производная от радиуса-вектора и направлена по касательной к годографу r (по касательной к траектории движения точки, рисунок 1.1):
V=dr/dt (1.2)
а
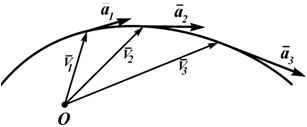
б Рисунок 1.2 Ускорение точки (изменение ее скорости) определяется как производная от скорости:
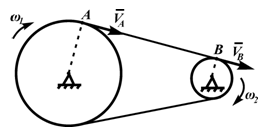
Вектор ускорения направлен по касательной к годографу вектора скорости (рисунок 1.2, б). Передаточный механизм Передаточные механизмы передают движение от одного тела к другому. Параметры движения тел определяются с учетом параметров точек соприкосновения (зацепления) этих тел. На рисунке 2.6 (а, б, в, г) приведены различные схемы передачи движения от одного тела к другому.
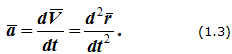
На рисунках 2.6, а и 2.6, б зависимости угловых скоростей колес определяются из соотношения Vc=ω 1⋅ r1=ω 2⋅ r2, т.е.
ω 1/ω 2=r2/r1 (2.12) На рисунке 2.6, а (внешнее зацепление) колёса вращаются в противоположные стороны, на рисунке 2.6, б (внутреннее зацепление) колеса вращаются в одну сторону. На рисунке 2.6, в показана цепная (ременная) передача. Скорости точек A и B цепи должны быть равны соответственно скоростям точек A и B , принадлежащих шкивам:
VA=ω 1⋅ r1=VB=ω 2⋅ r2, ω 1/ω 2=r2/r1.
а б
в г Рисунок 2.6
На рисунке 2.6, г поступательное движение стержня обеспечивает вращение колеса: VA=VC=ω ⋅ r, ω =VA/r
Рисунок 2.7
На рисунке 2.7 изображена фрикционная передача: колесо 1, прижимаясь к торцу колеса 2 в точке C, обеспечивает его вращение вокруг вертикальной оси.
VC=ω 1⋅ r1=ω 2⋅ d, ω 1/ω 2=d/r1 Передаточное число колес Передаточные механизмы (рисунок 1.8) предназначены для передачи вращения от одного вала (ведущего – 1) к другому (ведомому – 2). Вращательная скорость ν C в точке соприкасания колес C относится к точкам обоих колес, по модулю ν C = r1ω 1 = r2ω 2
Рис. 1.8 Передаточное число определяется отношением угловых скоростей или радиусов ведущего и ведомого колес.
В случае передачи вращения зубчатыми колесами передаточное число определяется как:
где z1 и z2 – числа зубьев ведущего и ведомого колес (т.к. число зубьев пропорционально среднему диаметру колеса). Сложное движение точки
Законы Ньютона сформулированы для движения точки по отношению к инерциальным системам отсчета. Для определения кинематических параметров точки при движении относительно произвольно движущейся системы отсчета вводится теория сложного движения.
Сложным называют движение точки по отношению к двум или нескольким системам отсчета.
Рисунок 3.1
На рисунке 3.1 показаны: - условно принимаемая за неподвижную система отсчета O1x1y1z1; - движущаяся относительно неподвижной система отсчета Oxyz; - точка M, перемещающаяся по отношению к подвижной системе отсчета. Движение точки M в данном случае является сложным. Её движение по отношению к подвижной системе отсчета называют относительным движением.
Движение той точки подвижной системы отсчета, в которой в данный момент находится движущаяся точка, по отношению к неподвижной системе отсчета называют переносным движением. Движение точки M по отношению к неподвижной системе отсчета называют абсолютным движением.
По аналогии с этими определениями будут называться относительные, переносные и абсолютные скорости и ускорения точки. Для их обозначения в относительном движении часто всего используется индекс r (relative – относительный) - Vr, ar ; в переносном движении индекс e (entrained - увлекать за собой) - Ve, ae.
Рисунок 3.2
Ниже приведен пример сложного движения точки - M.
На рисунке 3.2, а показан квадрат, вращающийся в плоскости чертежа вокруг неподвижной точки. По стороне квадрата движется точка M. Она участвует в двух движениях, поэтому можно ввести две системы отсчета: неподвижную, например, O1x1y1z1 - по отношению к которой вращается квадрат и подвижную Oxyz , скрепленную с квадратом, по оси Oy которой движется точка M (рисунок 3.2, б).
Движение точки M по стороне квадрата (по оси Oy скрепленной с квадратом подвижной системы) является относительным - скорость в этом движении Vr. Вращение точки M вместе с квадратом - переносное движение, скорость в этом движении - Ve. Абсолютное движение является результатом сложения переносного и относительного движений.
Пример момента силы Наиболее наглядным примером момента силы может служить поворачивание гайки гаечным ключом. Гайки заворачивается вращением, для этого к ним прикладывается момент, но сам момент возникает при воздействии нашей силы на гаечный ключ. Вы конечно интуитивно понимаете - для того чтобы посильнее закрутить гайку надо взяться за ключ как можно дальше от нее.
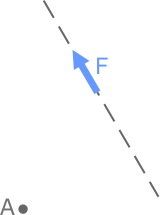
В этом случае, прикладывая ту же силу, мы получаем большую величину момента за счет увеличения его плеча (h2> h1). Плечом при этом служит расстояние от центра гайки до точки приложения силы. Плечо момента силы Рассмотрим порядок определения плеча h момента: Пусть заданы точка A и некоторая произвольная сила F, линия действия которой не проходит через эту точку. Требуется определить момент силы.
Покажем линию действия силы F (штриховая линия)
Проведем из точки A перпендикуляр h к линии действия силы
Длина отрезка h есть плечо момента силы F относительно точки A. Момент принимается положительным, если его вращение происходит против хода часовой стрелки (как на рисунке). Так принято для того, чтобы совпадали знаки момента и создаваемого им углового перемещения. Примеры расчета момента силы ОСНОВНЫЕ ПОНЯТИЯ КИНЕМАТИКИ ТОЧКИ Способы задания движения точки При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
При координатном способе задания движения задаются координаты точки как функции времени:
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t. При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна. ____________________________________________________ Естественный способ задания движения точки
Рисунок 1.4 На рисунке 1.4: τ -орт касательной; n -орт нормали; b -орт бинормали; При естественном способе задания движения предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении.
Единичные орты τ , n, b определяют направление соответствующих осей в каждой точке кривой.
Рисунок 1.5
Чтобы задать закон движения точки естественным способом необходимо: 1) знать траекторию движения; 2) установить начало отсчета на этой кривой; 3) установить положительное направление движения; 4) дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪ OM=S(t). Зная эти параметры можно найти все кинематические характеристики точки в любой момент времени (рисунок 1.5).
Скорость точки определяется по формулам (1.9) V=τ ⋅ dS/dt, V=dS/dt . (1.9)
Первая формула определяет величину и направление вектора скорости, вторая формула только величину. Кинематика точки 1.1 Способы задания закона движения точки Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения. В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки. 1.1.1 Векторный способ задания движения точки В этом случае положение точки на плоскости или в пространстве определяется вектором-функцией r=r(t) (1.1)
Рисунок 1.1
Этот вектор откладывается от неподвижной точки, выбранной за начало отсчета, его конец определяет положение движущейся точки. Годограф r, т.е. положение концов этого вектора в пространстве, определяет траекторию движущейся точки. Ее скорость в этом случае определяется как производная от радиуса-вектора и направлена по касательной к годографу r (по касательной к траектории движения точки, рисунок 1.1):
V=dr/dt (1.2)
а
б Рисунок 1.2 Ускорение точки (изменение ее скорости) определяется как производная от скорости:
Вектор ускорения направлен по касательной к годографу вектора скорости (рисунок 1.2, б). Поступательное движение твердого тела Поступательное движение твердого тела – это движение, при котором любая прямая, связанная с телом, при его движении остается параллельной своему начальному положению. Примеры поступательного движения: движение педалей велосипеда относительно его рамы, движение поршней в цилиндрах двигателя внутреннего сгорания относительно цилиндров, движение кабин колеса обозрения относительно Земли (рисунок 1.1) и т.д.
Рис. 1.1
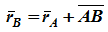
Теорема. При поступательном движении твердого тела траектории, скорости и ускорения точек тела одинаковы. Доказательство. Если выбрать две точки твердого тела А и В (рисунок 1.2), то радиусы-векторы этих точек связаны соотношением
Траектория точки А – это кривая, которая задается функцией rA(t), а траектория точки B – это кривая, которая задается функцией rB(t). Траектория точки B получается переносом траектории точки A в пространстве вдоль вектора AB, который не меняет своей величины и направления во времени (AB = const). Следовательно, траектории всех точек твердого тела одинаковы. Продифференцируем по времени выражение
Получаем
Рис. 1.2
Продифференцируем по времени скорость и получим выражение aB = aA. Следовательно, скорости и ускорения всех точек твердого тела одинаковы. Для задания поступательного движения твердого тела достаточно задать движение одной из его точек:
|
Последнее изменение этой страницы: 2017-04-13; Просмотров: 540; Нарушение авторского права страницы