
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основы автоматического управленияСтр 1 из 7Следующая ⇒
ВВЕДЕНИЕ Автоматика и автоматизация машин Курс «Автоматика и автоматизация машин» в том или ином виде изучается во всех высших технических учебных заведениях и является общеинженерной дисциплиной при подготовке современных высококвалифицированных инженеров. Он предполагает изучение вопросов автоматизации процессов управления СДМ. Под автоматизацией понимается введение различных автоматических устройств в системы управления машинами, отдельными агрегатами и технологическими процессами. Необходимость автоматизации возникает с развитием техники, т.к. функции управления процессами и машинами расширялись и усложнялись. Во многих случаях человек был уже не в состоянии управлять без специальных устройств. Началом зарождения автоматики условно принято считать появление автоматического регулятора уровня воды в паровом котле, изобретенного русским механиком И.И. Ползуновым (1765 г). Двадцать лет спустя английский механик Джеймс Уатт использовал на своей паровой машине регулятор частоты вращения. Принцип работы этих регуляторов оказался одним и тем же: они поддерживают заданное значение параметра не точно, а в некотором заданном диапазоне, поэтому такой принцип регулирования в настоящее время называют принципом Ползунова-Уатта. Проектирование первых автоматических устройств велось эмпирически и сопровождалось многочисленными неудачами. В 1876 г. русский ученый И.А. Вышнеградский в своей книге «Общие теории регуляторов» изложил основы теории автоматического управления и регулирования. Работы А.М. Ляпунова об устойчивости движения явились фундаментом в теории линейных систем автоматического регулирования. В начале 30-х годов теория автоматического регулирования обогатилась частотным аппаратом исследования благодаря работам Х. Найквиста и А.В. Михайлова. В развитие автоматики как науки большой вклад внесли такие известные ученые как Н.Е. Жуковский, А.И. Лурье, Л.С. Понтрягин, Е.И. Попов, Б.Н. Петров и др. Итак, что же такое автоматика? Автоматика- отрасль науки и техники, охватывающая теорию и принципы построения средств и систем управления и контроля различных объектов без непосредственного участия человека. Автоматическое управление- это осуществление всех процессов управления машинами, механизмами и технологическими процессами без непосредственного участия человека. Такое управление осуществляется системой автоматического управления. Системой автоматического управления (САУ) называется совокупность устройств, обеспечивающих автоматическое воздействие на процесс управления, направленное на поддержаниеили улучшение функционирования управляемого объекта в соответствии с целью управления. Разновидностью процесса управления является регулирование. Автоматическое регулирование- это поддержание постоянной или изменение по заданному закону некоторой выходной величины, характеризующей процесс, с помощью автоматического регулятора или системы автоматического регулирования (САР). Автоматическое регулирование является составной частью автоматического управления, но практически не всегда возможно определить четкую границу между САУ и САР. В литературе по автоматике эти понятия часто отождествляются. А вот если управление осуществляется совместными действиями технических устройств и человека, то такое управление называется автоматизированным. При этом технические устройства решают простые, стандартные задачи управления, а также обеспечивают информацией человека, который решает более сложные, нестандартные задачи управления (АСУ). Современные системы автоматического управления - это сложные динамические системы обеспечивающие оптимальные режимы работы машин, высокую производительность и точность работы. Но независимо от назначения и разнообразия выполняемых ими функций, САУ обычно строятся на определенных принципах и общих положениях с использованием типовых элементов, устройств и их комбинаций, которые изучаются в данном курсе. При проектировании высококачественных САУ находят применение методы анализа и синтеза, разработанные в теории автоматического регулирования и управления. Наиболее широкое распространение получили частотные методы исследования замкнутых систем, на основе которых разработаны удобные инженерные способы синтеза корректирующих цепей и приближенного построения переходных процессов в САУ. Основными достоинствами частотных методов являются их универсальность и простота, однако неизбежные упрощения приводят к некоторой потере точности. С появлением ЭВМ существенно расширились возможности как анализа и синтеза САУ, так и функциональные возможности самих САУ при включении ЭВМ в процесс управления. Включение ЭВМ в процесс управления может быть различным. В простейших случаях оператор пользуется ЭВМ для быстрого технико-экономического анализа новой ситуации в целях ввода в систему соответствующих корректирующих воздействий. В более совершенных системах ЭВМ непосредственно включается в цепь управления и сама не только перерабатывает полученную информацию, но и вводит управляющие воздействия в исполнительные механизмы регулируемого объекта. ЭВМ имеет возможность анализировать информацию не только в установившихся режимах, но и параметры быстропротекающих переходных процессов. Это позволяет оптимизировать регулирование, так как в ходе самого переходного процесса могут вырабатываться необходимые корректирующие воздействия на объект. При комплексной автоматизации большое распространение получают роботы и различные манипуляторы. Робот - это машина, предназначенная для автоматизации ручного, физически тяжелого, вредного, опасного и монотонного труда. Современные роботы представляют собой механические устройства (манипуляторы), управляемые автономно действующей решающей системой с развитыми подсистемами восприятия различной информации о внешней среде. Управление и связь между отдельными подсистемами осуществляется посредством многоуровневого взаимодействия современных управляющих ЭВМ. Автоматика в настоящее время играет важную роль в решении узловых проблем создания и совершенствования строительно-дорожных и подъемно-транспортных машин: повышении эксплуатационных качеств, топливной экономичности, снижении материалоемкости машин, повышении безопасности выполнения работ и защите окружающей среды. Актуальным является и создание высокоавтоматизированных строительно-дорожных и подъемно-транспортных машин, а также роботов, поскольку работы по ликвидации аварии на ЧАЭС показали малую эффективность существующих средств механизации и автоматизации таких работ. А это в свою очередь вынуждало специалистов рисковать здоровьем при проведении строительных и монтажных работ в опасной зоне. Целью дисциплины является изучение будущими специалистами принципов создания и практического использования средств и систем автоматизации подъемно-транспортных, строительных и дорожных машин и оборудования, развитие навыков эффективного применения роботов и робототехнических систем различных классов. В результате изучения дисциплины Вы должны знать: основы теории автоматического управления; назначение элементов автоматики и систем телемеханики; инженерные методы расчета и оценки свойств систем автоматизации; принципы построения систем управления подъемно-транспортными и строительно-дорожными машинами, роботами и манипуляторами. Типовые воздействия в САУ Поведение САУ в переходном процессе существенно зависит от величины и характера воздействий на систему. Воздействия, приложенные к системам регулирования, представляют собой непрерывно изменяющиеся функции времени, точный закон изменения которых невозможно предугадать. Однако при рассмотрении конкретных условий работы системы оказывается можно выбрать такое воздействие, которое для данной системы будет наиболее типичным или наиболее неблагоприятным. Выбрав такое воздействие и изучив вызванный им переходной процесс, можно судить о динамических свойствах системы. В виде типового воздействия при анализе динамики САУ выбирают единичное ступенчатое воздействие, единичный импульс и гармонические колебания. Типовые воздействия на звенья или САУ дают возможность сравнить их между собой и упрощают экспериментальное определение параметров звеньев САУ. Наиболее распространенным видом входного воздействия в автоматических системах является ступенчатое воздействие, например мгновенный поворот задающей оси следящего привода, наброс нагрузки и т.д. Для удобства исследования ступенчатое воздействие принимается единичным. За единичную ступенчатую функцию принимают скачкообразное воздействие с величиной скачка, равной единице при t > 0 (рис.2.7).
Рис. 2.7 Другим также распространенным видом входного воздействия в САУ является единичная импульсная функция или дельта – функция (рис. 2.8). Физически единичный импульс можно представить как очень кратковременный импульс, для которого t1→ 0 и c1→ ∞ (удар нагрузки, ток короткого замыкания), причем площадь t1c1 = 1.
и Рис. 2.8
Реакция звена на единичное ступенчатое воздействие называется переходной характеристикой звена h(t) и характеризует переход звена от одного установившегося состояния к другому. Если ступенчатое воздействие отличается от единичного х(t) = A ∙ 1(t), то реакция системы на такое воздействие называется кривой разгона. В зависимости от внутренних динамических свойств звеньев их переходные характеристики весьма различны
1 - апериодические процессы, про-текающие без смены знака производной и не имеющие экстремума; 2 - колебательные периодические процессы, в которых производная периодически меняет знак; 3 – монотонные процессы, в которых первая производная не меняет знака. Рис.2.9 Реакция звена на единичное импульсное воздействие называется импульсной переходной характеристикой или функцией веса ω (t). Связь между переходной характеристикой h(t) и весовой функцией звена выражается как ω (t) = h’(t) и наоборот, h(t) = Не вдаваясь в математические преобразования, следует отметить, что импульсная переходная характеристика представляет собой обратное преобразование Лапласа от переходной функции звена, ω (t) = L-1[W(p)], а переходная характеристика – обратное преобразование Лапласа от передаточной функции звена, деленной на p. h(t) = L-1[W(p)/p]. При экспериментальных исследованиях проще получить переходную характеристику h(t). Для оценки динамических свойств звеньев используют не только временные (переходные), но и частотные характеристики. Частотные характеристики описывают вынужденные колебания на выходе звена или системы, вызванные гармоническими воздействиями на его входе. Если на вход устойчивого линейного звена с передаточной функцией W(p) подать гармонический сигнал x(t) = A1 sin ω t, то по истечении времени переходного процесса на его выходе получим также гармонический сигнал той же частоты, но с другой амплитудой (A2) и сдвинутый по фазе относительно входных колебаний на угол (φ ) (рис.2.10). y(t) = A2 sin (ω t + φ )
Рис.2.10 При изменении частоты колебаний, ω но при A1 = const будут изменяться значения A2 и угол сдвига фаз φ . Это явление положено в основу частотных методов исследования динамический свойств CAУ. Зависимость отношения амплитуд колебаний на выходе и входе звена от частоты A(ω ) называется амплитудной частотной характеристикой (АЧХ). (рис.2.11). A(ω ) = Зависимость разности фаз (сдвига по фазе) выходных и входных колебаний от частоты φ (ω ) называется фазовой частотной характеристикой (ФЧХ) (рис.2.12).
Рис.2.11 Рис.2.12 Для определения установившейся реакции звена с передаточной функцией W(р) на гармонический входной сигнал необходимо определить комплексную функцию W(jω ) вещественной переменной ω . Функция W(jω ), получающаяся из передаточной функции звена при подстановке в нее (2.10) р = jω (преобразование Фурье), называется частотной передаточной функцией звена или амплитудно – фазовой характеристикой (АФХ) линейной системы или элемента. W(jω ) = Выделяя действительную Re(ω ) и мнимую Im(ω ) составляющие можно представить АФХ в алгебраической форме W(jω ) = Re(ω ) + jIm(ω ). (2.12) Зависимость действительной части АФХ от частоты называется вещественной (действительной) частотной характеристикой Re(ω ), а Im(ω ) – мнимой частотной характеристикой.
Рис.2.13. АФХ строится на комплексной плоскости (рис.2.13) при изменении частоты от -∞ до +∞, но поскольку она симметрична относительно действительной оси, то достаточно построить половину. АФХ можно также представить в виде радиус– вектора на комплексной плоскости и записать в показательной форме: W(jω ) = A(ω )℮ jφ (ω ) (2.13) где A (ω ) – модуль вектора (представляет собой АЧХ); φ (ω ) – аргумент вектора W(jω ) (представляет собой ФЧХ). Переход от алгебраической формы (2.12) записи АФХ к показательной (2.13) осуществляется по следующим соотношениям A(ω ) = φ (ω ) = arctg Im(ω ) / Re(ω ) (2.15) При изменении частоты от 0 до ∞ конец вектора W(jω ) на комплексной плоскости кривую, которая называется годографом АФХ. Таким образом, динамика элементов и систем характеризуется дифференциальными уравнениями, передаточными функциями, временными (переходная и импульсная переходная характеристики) и частотными характеристиками. Естественно, что все указанные выражения однозначно связаны между собой и могут быть теоретически получены из дифференциального уравнения. Некоторые из динамических характеристик (переходные и частотные характеристики) удобно получать экспериментально, что особенно важно при изучении сложных объектов, математическое описание которых отсутствует. Таким образом, в в усилительном звене сигналы от входа к выходу передаются без сдвига по фазе, а отношение амплитуд выходного и входного сигналов равны коэффициенту усиления k и остаются постоянными на все частотах.
Рис.2.15 Примером конструктивного выполнения усилительного звена могут быть: механический редуктор, рычажное сочленение, гидрообъемный привод т.д. Запаздывающее звено. Выходная величина в запаздывающем звене точно повторяет изменение входной величины, но с некоторыми отставанием по времени t, называемым временем запаздывания. y(t)=x(t-t) (2.22) Передаточная функция запаздывающего звена
- АЧХ и ФЧХ запаздывающего звена A(w)=1; j(w)=-wt Примером запаздывающего звена могут быть транспортеры, конвейеры, трубопроводы и др. K – коэффициент передачи. При этом предполагается, что Т1 < T2. Которые равны
Колебательный процесс получается при комплексны корнях характеристического уравнения. Поэтому согласно (2.24) колебательному звену соответствует значение коэффициента затухания 0< x < 1 (рис. 2.19, кривая 1). При x> 1 переходный процесс становится апериодическим, характеристика его изображена на рис. 2.19, кивая 2. Это уже будет не элементарное звено, а звено, которое может быть представлено в виде двух апериодически звеньев с постоянным времени Т1 и Т2. Если x=1, то апериодические звенья имеют одинаковую постоянную времени, те. Т1=Т2.
Рис.2.19
Рис.2.20 Если x=0 получается частный случай колебательного звена, называемого консервативным звеном. Это идеализированное звено, соответствующее колебательному звену, работающему без потерь энергии в котором протекают незатухающие колебания. (рис. 2.20, кривая 1). При x< 0 выходные колебания с течением времени возрастают. (рис. 2.20, кривая 2). Такое звено является неустойчивым колебательным звеном. Графики частотных характеристик представлены на рис. 2.21 а, б, в.
Рис.2.21 АЧХ колебательного звена (рис. 2.21 а) имеет максимум Amax при некоторой частоте wmax. Значение этого максимума тем больше, чем меньше коэффициент затухания x. При x=0 Аmax равен бесконечности (консервативное звено). Таким образам максимум характеризует колебательность звена и определяет показатели колебательности. M=Amax/Ao где Ao– значение АЧХ при w=0. Чем больше М, тем хуже затухают колебания выходной величины в переходном процессе. ФЧХ колебательного звена (рис. 2.21 б) монотонно изменяются от 0 до -p при возрастании частоты от 0 до ¥. Примером колебательного звена может служить масса, подвешенная на пружине и снабженная демпфером (рис. 2.22), электрический контур, содержащий индуктивность, емкость и омическое сопротивление (рис. 2.23) линеаризованная гидравлическая цепь (рис 2.24), механический тахометр (2.25) и др.
Рис.2.22
Рис.2.23
Рис.2.24
Рис.2.25
Интегрирующее звено. Интегрирующим звеном (астатическим) называют такое устройство, у которого при неизменном значении входной выходная величина может неограниченно возрастать или убывать. Элементы системы, обладающие этим свойством, не имеют самовыравнивания. Работа интегрирующего звена описывается линейным дифференциальным уравнением
или интегральным,
В интегрирующих звеньях в установившемся режиме имеет место линейная зависимость между входной величиной и производной выходной величины. Передаточная функция интегрирующего звена:
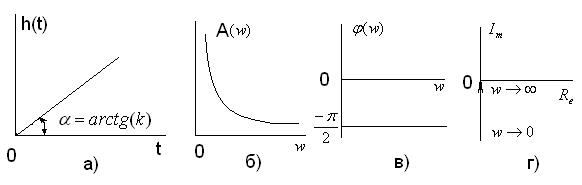
где k – коэффициент усиления или передачи звена по скорости. Он численно равен скорости изменения выходной величины при единичном значении входной и имеет размерность ( Переходную функцию идеального интегрирующего звена получают из уравнения (2.25): h(t)=kt График переходной функции представляет собой прямую линию (рис.2.26а) с углом наклона
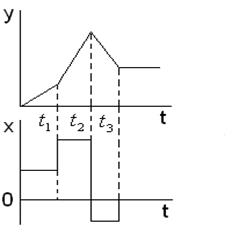
рис. 2.26 При нескольких ступенчатых воздействиях переходные процессы в идеальном интегрируемом звене представлены на рис. 2.27. Видно, что с момента времени АФХ интегрального звена имеет вид:
АЧХ и ФЧХ соответственно выглядят:
Частотные характеристики представлены на рис. 2.26 б, в, г.
Рис. 2.27 Интегрирующим звеном можно считать электродвигатель, если за входное воздействие принять подводимое напряжение, а выходной величиной считать угол поворота вала двигателя. К интегрирующим звеньям относятся также гидравлический демпфер (рис. 2.28).
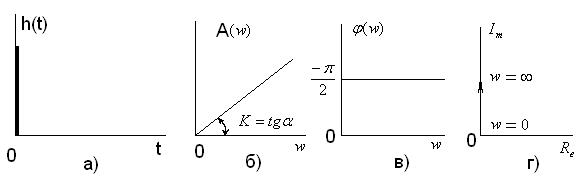
Реальные интегрирующие звенья обычно обладают заметной инерционностью. Такие звенья не относятся к элементарным, т.к. могут быть представлены более простыми звеньями. Дифференцирующее звено. Дифференцирующим звеном называется такое звено, у которого в установившемся режиме значение выходной величины (у) зависит только от скорости изменения входного воздействия (х), т.е. В теории автоматического регулирования рассматриваются два типа дифференцирующих звеньев: идеальное и реальное. Идеальное звено описывается уравнением (2.26). Его передаточная функция W(p) = kp При подаче на вход идеального дифференцирующего звена единичного воздействия выходная величина совершает скачок в бесконечность (рис.2.29а), что соответствует бесконечно большой скорости нарастания входной величины h(t) = k где Частотные характеристики идеального дифференцирующего звена изображены на рис.2.29, а функции их имеют вид: АФХ: W(j АЧХ: А( ФЧХ:
Рис. 2.29 На практике не существует такого реального элемента (кроме тахогенератора – приближённо, если входной величиной является угол поворота ротора, а выходной – ЭДС якоря), в котором на выходе точно воспроизводилась бы производная от любого входного сигнала.
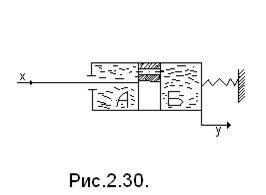
Примером реального дифференцирующего звена может быть гидравлический демпфер с пружиной (рис.2.30), если на вход подать перемещение поршня х=h. а выходной координатой (у) будет перемещение цилиндра. При большой скорости перемещения поршня жидкость не успевает перетекать через дроссельное отверстие из полости А в полость Б, и, следовательно, цилиндр переместится на ту же величину, что и поршень, сжимая пружину. С течением времени по мере перетекания жидкости цилиндр возвращается в исходное положение. Понятие об устойчивости САУ В замкнутых автоматических системах управления при появлении возмущающих воздействий в общем случае возникают колебания регулируемой величины. Эти колебания могут быть затухающими, незатухающими и расходящимися (рис. 2.19, 2.20). Для описания характеристик отмеченных особенностей вводится понятие устойчивость. Устойчивость – это способность системы, выделенной из состояния равновесия под влиянием возмущающих и управляющих воздействий, с течением времени вновь прийти в равновесное состояние. Устойчивость – это внутреннее свойство системы управления, не зависящее от внешних воздействий. Физическую трактовку понятия устойчивости можно пояснить следующим примером. Если шар помещён в верхнюю точку возвышенности (рис. 4.1), то система неустойчива, поскольку при малейшем отклонении шара от начального положения он скатится по склону поверхности и не возвратится в исходное положение.
Свойство устойчивости – основное свойство, которым должна обладать любая САУ. Анализ на устойчивость – важный этап исследования САУ. Задача анализа систем на устойчивость решается в таких постановках: устойчива ли система при заданных значениях её параметров; в каких диапазонах можно изменять параметры системы, не нарушая свойства устойчивости. Очевидно, что судить об устойчивости системы можно по характеру переходного процесса. Переходный процесс в системе зависит как от свойств самой системы, так и от вида возмущения. В общем случае при действии на систему некоторого возмущения переходный процесс y(t) будет состоять из двух составляющих y(t) = где
После прекращения действия входного сигнала x(t) (возмущения) дифференциальное уравнение для СЛА примет вид:
Следовательно, можно утверждать, что решением этого дифференциального уравнения будет функция
Выражение (4.3) называют математическим условием устойчивости САУ. Если
то переходный процесс расходится и система будет не устойчивой. Системы, в которых переходный процесс с течением времени не расходиться и не затухает, называются находящимися на границе устойчивости. Чтобы исследовать устойчивость САУ, нет необходимости находить общего решение одного дифференциального уравнения (4.1), т.к. оно зависит от вида корней характеристического уравнения САУ. Действительно, уравнение (4.2) имеет решение в виде
где
полученного на основании дифференциального уравнения (4.2). В зависимости от уравнения (4.5) переходный процесс в системе будет затухающим или расходящимся. Рассмотрим случаи, когда корни вещественные, комплексные и чисто мнимые. Вещественные корни. Если все корни являются вещественными и отрицательными, т.е.
Комплексные корни. Каждому комплексному корню
Оно представляет собой гармоническую функцию с угловой частотой процессса (рис.4.3) При положительной вещественной части Чисто мнимые корни. В этом случае
Следовательно, для устойчивости линейной САУ необходимо и достаточно, чтобы вещественные корни и вещественные части комплексных сопряженных корней характеристического уравнения были отрицательными. На комплексного плоскости все корни характеристического уравнения изображаются точками с координатами a и jw (рис 4.6). Для устойчивости линейных САУ необходимо и достаточно, чтобы все корни характеристического уравнения лежали слева от мнимой оси.
Рис.4.6 Таким образом, для определения устойчивости необходимо решить характеристическое уравнение замкнутой САУ и проанализировать расположение корней на комплексной плоскости. Определение устойчивости САУ путём вычисления корней характеристического уравнения не всегда приемлемо из-за высокого порядка решаемых алгебраических уравнений. С другой стороны для определения устойчивости необязательно знать значение корней, достаточна убедиться в отрицательности вещественных частей корня. Методы, основанные на установлении факта их отрицательности, без вычисления самих корней, называют критериями устойчивости. Различают алгебраические и частотные критерии оценки устойчивости. В теории автоматического регулирования наибольшее распространение получили алгебраические критерии Рауса, Гурвица, Вышнеградского; частные критерии Михайлова и Найквиста. С математической точки зрения все критерии устойчивости эквивалентны, поэтому подробно рассмотрим только некоторые из них. Достаточно, чтобы все корни характеристического уравнения лежали слева от мнимой оси. Таким образом, для определения устойчивости необходимо решить характеристическое уравнение замкнутой САУ и проанализировать расположение корней на комплексной плоскости. Определение устойчивости САУ путём вычисления корней характеристического уравнения не всегда приемлемо из-за высокого порядка решаемых алгебраических уравнений. С другой стороны для определения устойчивости необязательно знать значение корней, достаточна убедиться в отрицательности вещественных частей корня. Методы, основанные на установлении факта их отрицательности, без вычисления самих корней, называют критериями устойчивости. Различают алгебраические и частные критерии оценки устойчивости. В теории автоматического регулирования наибольшее распространение получили алгебраические критерии Рауса, Гурвица, Вышнеградского; частные критерии Михайлова и Найквиста. С математической точки зрения все критерии устойчивости эквивалентны, поэтому подробно рассмотрим только некоторые из них.
Критерии устойчивости
Алгебраические критерии устойчивости основаны на зависимости между коэффициентами характеристического уравнения и характером распределения корней этого уравнения в комплексной плоскости. Из алгебраических критериев наибольшего распространение получил критерии устойчивости Гурвица или его иногда называют критерием Рауса-Гурвица. Критерии устойчивости Гурвица может быть сформулирован следующим образом: линейная система с характеристического уравнения
будет устойчивой, если все коэффициенты уравнения (4.7) положительны (необходимое условие), а все определители Гурвица и все его диагональные миноры положительны (достаточные условие), т.е. если Определитель Гурвица состоит из коэффициентов уравнения (4.7) и содержит n строк и n столбцов. Он имеет вид:
и составляется следующим образом. По главной диагонали в порядке возрастания индексов выписываются все коэффициенты от Затем каждый из столбцов дополняется вверх коэффициентами с возрастающими индексами, а вниз – с убывающими. В случае отсутствия коэффициентов подставляются нули. Диагональные миноры составляются по следующему правилу:
Последний (n-ый) определитель включает всю матрицу (4.8), но он может быть выражен через предпоследний определитель Гурвица
Условие нахождения системы на границе устойчивости может получить, приравнивания нулю последний определитель (
|
Последнее изменение этой страницы: 2017-04-13; Просмотров: 782; Нарушение авторского права страницы
 δ (t) = {
δ (t) = { δ (t) dt = 1
δ (t) dt = 1
 ω (t)dt.
ω (t)dt.
 ( ω ) (2.11)
( ω ) (2.11)

 (2.14)
(2.14) а) б) в) г)
а) б) в) г)
 (2.24)
(2.24)

 (2.25)
(2.25)
 ).
).
 увеличение (х) приводят к повышению скорости изменения выходной величины (прямая у круче). Появление отрицательного входного воздействия в момент времени
увеличение (х) приводят к повышению скорости изменения выходной величины (прямая у круче). Появление отрицательного входного воздействия в момент времени  вызывает уменьшение выходной величины. Кроме того, при уменьшении входной величины до нуля, выходная величина интегрирующего звена остается неизмененной и не стремится к нулю, как в усилительном звене.
вызывает уменьшение выходной величины. Кроме того, при уменьшении входной величины до нуля, выходная величина интегрирующего звена остается неизмененной и не стремится к нулю, как в усилительном звене.

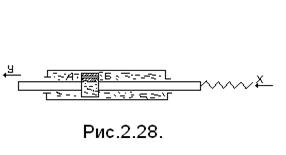 В гидравлическом демпфере входным воздействием х является сила, приложенная к пружине, а выходной величиной y – перемещением тока. При мгновенном приложении силы на входе перемещение поршня демпфера будет происходить постепенно, так как жидкость перетекает из полости Б в полость А через дроссельное отверстие в поршне.
В гидравлическом демпфере входным воздействием х является сила, приложенная к пружине, а выходной величиной y – перемещением тока. При мгновенном приложении силы на входе перемещение поршня демпфера будет происходить постепенно, так как жидкость перетекает из полости Б в полость А через дроссельное отверстие в поршне. (2.26)
(2.26) (t)
(t) при t=0 и 0 при t
при t=0 и 0 при t  0.
0. ) = jk
) = jk  ;
;  ;
; 
 Реальным дифференцирующим звеном является дифференцирующее инерционное звено. Оно может быть представлено последовательным соединением идеального дифференцирующего и апериодического и его передаточная функция (как будет показано далее) является произведением передаточных функций этих звеньев. При ступенчатом изменении входного воздействия на такое звено выходная величина скачкообразно изменяется до максимального значения, а затем уменьшается до нуля.
Реальным дифференцирующим звеном является дифференцирующее инерционное звено. Оно может быть представлено последовательным соединением идеального дифференцирующего и апериодического и его передаточная функция (как будет показано далее) является произведением передаточных функций этих звеньев. При ступенчатом изменении входного воздействия на такое звено выходная величина скачкообразно изменяется до максимального значения, а затем уменьшается до нуля.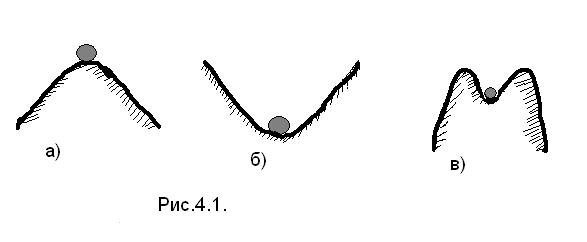
 - составляющая, определяющая свободное движение системы, определяемое начальными условиями и свойствами самой системы;
- составляющая, определяющая свободное движение системы, определяемое начальными условиями и свойствами самой системы;  - составляющая, которая выражает вынужденные движения, определяемые возмущающими воздействием и свойствами системы.
- составляющая, которая выражает вынужденные движения, определяемые возмущающими воздействием и свойствами системы. (4.2)
(4.2) (4.3)
(4.3)
 (4.4)
(4.4) - Постоянные интегрирования, определяемые из начальных условий;
- Постоянные интегрирования, определяемые из начальных условий;  - корни характеристического уравнения системы
- корни характеристического уравнения системы 
 (4.5)
(4.5)
 , то каждое слагаемое уравнения (4.4) с течением времени будет стремиться к нулю, а следовательно, и весь переходный процесс будет затухающим, а система устойчивой (рис.4.2 крив.1).Но если среди вещественных отрицательных корней есть один вещественный положительный
, то каждое слагаемое уравнения (4.4) с течением времени будет стремиться к нулю, а следовательно, и весь переходный процесс будет затухающим, а система устойчивой (рис.4.2 крив.1).Но если среди вещественных отрицательных корней есть один вещественный положительный  , о соответствующее слагаемое при
, о соответствующее слагаемое при  будет бесконечно увеличиваться. Поэтому, хотя все слагаемые, кроме одного, будут затухать, процесс будет расходящимся, неустойчивым (рис4.2.кр2).
будет бесконечно увеличиваться. Поэтому, хотя все слагаемые, кроме одного, будут затухать, процесс будет расходящимся, неустойчивым (рис4.2.кр2).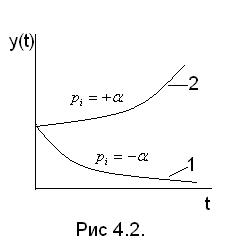
 соответствует решение вида
соответствует решение вида (4.6)
(4.6) . Параметр
. Параметр  является показателем затухания огибающей кривой переходного
является показателем затухания огибающей кривой переходного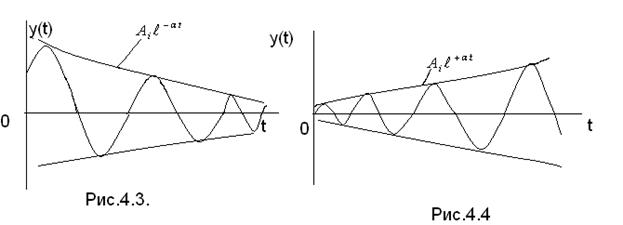
 колебания переходного процесса будут расходящимися (4.4).
колебания переходного процесса будут расходящимися (4.4). , а корни
, а корни  . Из (4.6) следует, что составляющая переходного процесса представляет собой незатухающие колебания с угловой частотой
. Из (4.6) следует, что составляющая переходного процесса представляет собой незатухающие колебания с угловой частотой  и постоянной амплитудой
и постоянной амплитудой  (рис.4.5)
(рис.4.5)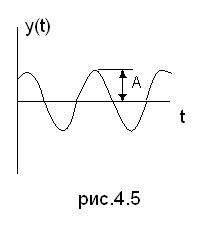
 (4.7)
(4.7) > 0;
> 0;  > 0…
> 0…  > 0.
> 0. (4.8)
(4.8) до
до  .
. =
=  ;
;  и т.д.
и т.д. (4.9)
(4.9) =0) при положительности всех остальных определителей. Как видно из формулы (4.9) это условие распадается на два
=0) при положительности всех остальных определителей. Как видно из формулы (4.9) это условие распадается на два и
и 