|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Старооскольский технологический институтСтр 1 из 5Следующая ⇒
Старооскольский технологический институт (филиал) Московского института стали и сплавов (технологического университета) Кафедра АиПЭ А.Ю. Еременко Технологические процессы и производство Методические указания к выполнению лабораторных работ для студентов специальности
Одобрено редакционно-издательским советом Старый Оскол 2006
УДК ББК
Рецензент:
Еременко А.Ю. Технологические процессы и производство. Методические указания к выполнению лабораторных работ. Старый Оскол, СТИ МИСиС, 2006. – с.
Методические указания к выполнению лабораторных работ по курсу «Технологические процессы и производство» для студентов специальности ________ очной, очно-заочной, заочной форм обучения.
© Еременко А.Ю.
© СТИ МИСиС
Содержание Механический привод механизмов и машин. Кинематические схемы
Цель работы: Изучить основные элементы привода механизмов и машин, принципы построения кинематических схем и научиться производить основные их расчеты.
Теоретическое введение
1. Понятие о машинах, оборудовании*, механизмах и деталях машин
В промышленности применяются разнообразные машины, состоящие из различных механизмов и сборочных единиц (узлов), которые в свою очередь представляют собой комплексы из крупных и мелких деталей, разнообразных по форме, материалу, а часто и по свойствам. Машина представляет собой механическое устройство с согласованно работающими частями, осуществляющее определенные целесообразные движения для преобразования энергии, материалов или информации. В зависимости от характера выполняемой работы машины можно разделить на машины-двигатели, машины-орудия, транспортирующие машины и новый класс - управляющие машины. Машины-двигатели служат для преобразования тепловой, электрической и всякой другой энергии в механическую работу. К ним относятся паровые машины, гидравлические и газовые турбины, электродвигатели, двигатели внутреннего сгорания и др. Машины-генераторы, преобразующие механическую энергию в другой вид энергии. К ним относятся компрессоры, динамо-машины и др. Машины-орудия - это машины, использующие механическую работу машин-двигателей для выполнения технологических операций, т.е. операций обработки и переработки различных материалов, изготовления всевозможных изделий, частей (деталей) машин и т. д. Машиной-орудием являются, например, автоматические линии, токарный и строгальный станки, ковочный пресс. Транспортирующие машины, например мостовые краны, автокраны, конвейеры, служат для перемещения различных грузов. Сочетание машины-двигателя, передаточных механизмов и машины-орудия образует машинный агрегат.
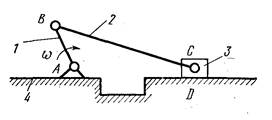
Рис. 1 Схема кривошипно-шатунного механизма
Управляющие машины представляют собой автоматизированные комплексы для управления сложными агрегатами, системами или совокупностью взаимосвязанных объектов, имеющие в своем составе одно или несколько вычислительных устройств или ЭВМ (электронно-вычислительные машины). Применяются для обеспечения наиболее эффективного режима работы управляемого объекта (достижения наибольшей производительности и наивысшего качества, наименьшего расхода сырья и др.). Все машины состоят из деталей, которые объединены в механизмы и сборочные единицы (узлы). Деталь представляет собой изделие, изготовленное из единого куска материала без применения сборочных операций. Деталями являются как простые мелкие изделия, например винт, гайка, шайба, так и крупные, сложной формы – станица, корпус двигателя, вал турбины и др. Механизмом называют совокупность подвижно соединенных тел (звеньев), совершающих под действием приложенных сил определенные целесообразные движения. Работа механизма связана с изменением угловых скоростей (зубчатая, ременная, цепная и другие передачи) или с преобразованием одного вида механического движения в другой, например вращательного в возвратно-поступательное и наоборот (кривошипно-шатунный, кулачковый и другие механизмы). Механизм образуется из подвижных звеньев, соединенных между собой кинематическими парами и неподвижным звеном. Соединение двух звеньев поверхностями, линиями или точками называют кинематическими парами. Примером механизма может являться кривошипно-шатунный механизм (рис. 1). Этот механизм имеет четыре кинематические пары, соединенные в точках A, B, C и D. Кривошип 1 совершает вращательное движение относительно неподвижной опоры на станине 4 в точке A . За полный оборот кривошипа точки A, B, C и D подвижных звеньев - кривошипа 1, шатуна 2 и ползуна 3 - описывают соответствующие траектории, причем за каждый последующий оборот кривошипа подвижных звеньев будут перемещаться по тем же траекториям, преобразуя вращательное движение кривошипа 1 в возвратно-поступательное движение ползуна 3. Когда ведущим звеном служит поршень, механизм преобразует его возвратно-поступательное движение во вращательное движение кривошипа. Сборочной единицей называют комплекс совместно работающих деталей, например насос, суппорт, редуктор, муфты, подшипник качения и др. Подавляющее большинство деталей сборочных единиц встречается почти во всех машинах (болты, валы, подшипники качения и др.) и поэтому их называют деталями и сборочными единицами общего назначения. Деталями и сборочными единицами специального назначения называют такие, которые встречаются только в одном или нескольких типах машин, например шпиндели станков, поршни, коленчатые валы и др. Все детали и сборочные единицы общего назначения делятся на соединительные (заклепочные, шпоночные, резьбовые и др.), передающие вращательное движение (зубчатые колеса, шкивы и др.) и обслуживающие передачи (валы, подшипники, муфты и др.).
Ременные передачи
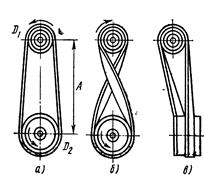
Рис. 2 Передачи с плоским ремнем: с - открытая; б - перекрестная, в - полуперекрестная, г - с натяжным роликом
и мощностей. Ремень охватывает два шкива, насаженных на валы. Нагрузка передается силами трения, возникающими между шкивом и ремнем вследствие натяжения последнего. Эти передачи бывают с плоским ремнем, с клиновым ремнем и круглым ремнем.
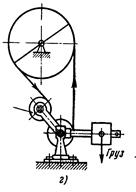
В приводах машин применяются плоские ремни - кожаные, хлопчатобумажные цельнотканые, хлопчатобумажные шитые, тканые прорезиненные и клиновидные. Используются также шерстяные тканые ремни. В станках применяются главным образом ремни кожаные, прорезиненные и клиновидные. Для уменьшения скольжения ремня вследствие недостаточного трения из-за небольшого угла обхвата применяют натяжные ролики (рис. 2, г). Натяжной ролик представляет собой промежуточный шкив на шарнирно укрепленном рычаге. Под действием груза на длинном плече рычага ролик нажимает на ремень, натягивая его и увеличивая угол обхвата ремнем большого шкива. Рис. 3 Передачи с клиновидным ремнем: а – нормального сечения, б - шариком Диаметр натяжного ролика не должен быть меньше диаметра малого шкива. Натяжной ролик следует устанавливать у ведомой ветви не слишком близко к шкивам. Передача клиновыми (текстропными) ремнями широко распространены в промышленности, они просты и надежны в эксплуатации. Основное преимущество клиновых ремней - лучшее сцепление их со шкивом и относительно малое скольжение. Причем габариты передачи получаются значительно меньше по сравнению с плоскими ремнями. На рис. 3, а показан клиновидный ремень в сечении; он состоит из нескольких рядов прорезиненной ткани 1, нескольких рядов корда 2 (коря -толстые крученые хлопчатобумажные нити), слоя резины 3 и обертки 4 из прорезиненной ткани. Ремень укладывают в ручей на ободе шкива 7, и он утапливается настолько, что не касается дна 6 шкива своей поверхностью 5. Для передачи больших крутящих усилий применяют многоручьевые клиноременные приводы со шкивами обода, которые оснащены рядом канавок. Цепные передачи
Для передачи вращательного движения между удаленными друг от друга валами применяется помимо ременной цепная передача. Как показано на рис. 4, а, она представляет собой замкнутую металлическую шарнирную цепь, охватывающую два зубчатых колеса (звездочки). Цепь в отличие от ремня не проскальзывает, кроме того, ее можно применять в передачах также при малом расстоянии между валами и в передачах со значительным передаточным числом. Рис. 4 Цепные передачи: а — общий вид, б—однорядная роликовая цепь, в—замок, г — пластинчатая цепь; а - межосевое расстояние, Р — шаг цепи
Цепные передачи передают мощность от долей лошадиных сил (велосипедные цепи) до тысячи лошадиных сил (многорядные цепи повышенной прочности). Цепи работают с большими скоростями, доходящими до 30 м/с, и передаточным числом и = 15. Коэффициент полезного действия цепных передач составляет в отдельных случаях 0,98. Цепная передача состоит из двух звездочек — ведущей 1 и ведомой 2, сидящих на валах, и бесконечной цепи 3, надетой на эти звездочки. Из различных видов цепей наибольшее распространение имеют цепи однорядные и многорядные роликовые и пластинчатые. Роликовые цепи допускают наибольшую скорость до 18 м/с, пластинчатые - до 30 м/с. В цепных передачах сохраняется постоянным передаточное число: кроме того, они очень прочны, что позволяет передавать большие усилия. В связи с этим цепные передачи применяют, например, в таких грузоподъемных механизмах, как тали и лебедки. Цепи большой длины используются в эскалаторах метро, конвейерах.
Фрикционные передачи
 Во фрикционных передачах вращательное движение передается от ведущего к ведомому валу посредством плотно прижатых друг к другу гладких колес (дисков) цилиндрической или конической формы (рис. 5, а, б). Фрикционная передача применяется в лебедках, винтовых прессах, станках и ряде других машин. Во фрикционных передачах вращательное движение передается от ведущего к ведомому валу посредством плотно прижатых друг к другу гладких колес (дисков) цилиндрической или конической формы (рис. 5, а, б). Фрикционная передача применяется в лебедках, винтовых прессах, станках и ряде других машин.
Чтобы фрикционная передача работала без скольжения и таким образом обеспечивала необходимую величину силы трения (сцепления) Т, поверхность ведомого колеса покрывают кожей, резиной, прессованной бумагой, древесиной или другим материалом, который может создать надлежащее сцепление со стальным или чугунным ведущим колесом. Во фрикционных передачах применяют цилиндрические колеса для передачи движения между валами, расположенными параллельно (рис. 5, а), а конические - между пересекающимися валами (рис. 5, б). В оборудовании находят применение фрикционные передачи с регулируемым передаточным числом. Одна из простейших таких передач показана на рис. 6. Для изменения передаточного числа они оснащены устройствами, перемещающими одно из колес (дисков) вдоль вала и в соответствующем месте его закрепляющими. Уменьшение таким устройством диаметра D ведомого колеса до рабочего диаметра D 1 обеспечивающее увеличение частоты вращения ведомого колеса. В результате уменьшается передаточное число
Зубчатые передачи
Зубчатые передачи имеются почти во всех сборочных единицах промышленного оборудования. С их помощью изменяют по величине и направлению скорости движущихся частей станков, передают от одного вала к другому усилия и крутящие моменты, а также преобразуют их. В зубчатой передаче движение передается с помощью пары зубчатых колес (рис. 7, а - ж). В практике меньшее зубчатое колесо принято называть шестерней, а большее - колесом. Термин «зубчатое колесо» относится как к шестерне, так и к колесу. В зависимости от взаимного расположения геометрических осей валов зубчатые передачи бывают: цилиндрические, конические и винтовые. Зубчатые колеса для промышленного оборудования изготовляют с прямыми, косыми и угловыми (шевронными) зубьями. По профилю зубьев зубчатые передачи различают: эвольвентные, с зацеплением Новикова и циклоидальные. В машиностроении широко применяют эвольвентное зацепление. Принципиально новое зацепление М. А. Новикова возможно лишь в косых зубьях и благодаря высокой несущей способности является перспективным. Циклоидальное зацепление используется в приборах и часах. Цилиндрические зубчатые колеса в прямым зубом (рис. 7, а) служат в передачах с параллельно расположенными осями валов и монтируются на последних неподвижно или подвижно. Зубчатые колеса с косым зубом (рис. 7, б) применяются для передачи движения между валами, оси которых пересекаются в пространстве, а в ряде случаев и между параллельными валами, например, когда в передаче должны сочетаться повышенная окружная скорость колес и бесшумность их работы при больших передаточных отношениях до 15:1. Косозубые колеса монтируют на валах только неподвижно. Работа косозубых колес сопровождается осевым давлением, а потому они пригодны для передачи лишь сравнительно небольших мощностей. Осевое давление можно устранить, соединив два косозубых колеса с одинаковыми, но направленными в разные стороны - зубьями. Так получают шевронное колесо (рис. 7, б), которое монтируют, обращая вершину угла зубьев в сторону вращения колеса. На специальных станках шевронные колеса изготовляют целыми из одной заготовки. Шевронные колеса отличаются большой прочностью, их применяют для передачи больших мощностей в условиях, когда зубчатое зацепление испытывает во время работы толчки и удары. Эти колеса также устанавливают на валах неподвижно.
На рис. 7, г показаны конические прямозубые, а на рис. 7, ж круговые зубчатые колеса. Их назначение — передача вращения между валами, оси которых пересекаются. Конические зубчатые колеса с круговым зубом применяются в передачах, где требуется особая плавность и бесшумность движения. На рис. 7, д изображены зубчатое колесо и рейка. В этой передаче вращательное движение колеса 1 преобразуется в прямолинейное движение рейки 2. Червячные передачи. Червячные передачи позволяют получить малые передаточные числа, что делает их применение целесообразным в случаях, когда требуются небольшие частоты вращения ведомого вала. Имеет существенное значение и то, что червячные передачи занимают меньше места, чем зубчатые. Червячная передача (см. рис. 7, е) состоит из червяка /, насаживаемого на ведущий вал или изготовляемого заодно с ним, и червячного колеса 2, закрепляемого на ведомом валу. Червяк представляет собой винт с трапецеидальной резьбой. Червячное колесо имеет вогнутые по длине винтовые зубья.
По числу зубьев различают червяки однозаходные, двухзаходные и т.д. Однозаходный червяк за один оборот поворачивает колесо на один зуб, двухзаходный червяк - два и т.д. Чтобы подсчитать передаточное число и червячной передачи, нужно число заходов К червяка разделить на число зубьев z2 червячного колеса. Допустим, К == 2, а z2= 50, тогда u = При частоте вращения червяка п == 500 в минуту получим для червячного колеса n 2 = 500·0,04 ==20 об/мин. Недостатком червячных передач являются большие потери передаваемой мощности на трение. Для уменьшения потерь червяк изготовляют из стали и его поверхность после закалки шлифуют, а червячное колесо изготовляют из бронзы. При таком сочетании материалов трение уменьшается, следовательно, меньше становятся потери мощности; кроме того, уменьшается износ детали. Из бронзы в целях экономии обычно делают не все червячное колесо, а только обод, надеваемый затем на стальную ступицу.
3. Механизмы преобразования вращательного движения
Наиболее распространенными механизмами преобразования вращательного движения в прямолинейное являются знакомые нам по рис. 1 кривошипно-шатунный и по рис. 7, д - реечный, а также винтовой, эксцентриковый, кулисный, храповой и другие механизмы. Винтовые механизмы
Винтовые механизмы широко применяются в самых разнообразных машинах для преобразования вращательного движения в поступательное и, наоборот, поступательного во вращательное. Особенно часто они применяются в станках для осуществления прямолинейного вспомогательного (подача) или установочного (подвод, отвод, зажатие) движения таких сборочных единиц, как столы, суппорты, каретки, шпиндельные бабки, головки и т. д. Винты, применяемые в этих механизмах, называются ходовыми. Часто также винтовой механизм служит для подъема грузов или вообще для передачи усилий. Примером такого применения винтового механизма является использование его в домкратах, винтовых стяжках и т. д. В этом случае винты будут называться грузовыми. Грузовые винты обычно работают с незначительными скоростями, но с большими усилиями по сравнению с ходовыми винтами. Основными деталями винтового механизма являются винт и гайка. Обычно в винтовых механизмах (передачах винт - гайка) движение передается от винта к гайке, т. е. вращательное движение винта преобразуется в поступательное движение гайки, например механизм поперечного перемещения суппорта токарного станка. Встречаются конструкции, когда движение передается от гайки к винту, и винтовые передачи, в которых вращение винта преобразуется в поступательное того же винта, при закрепленной неподвижно гайке. Примером такого механизма может служить винтовая передача верхней части стола (рис. 9, а) фрезерного станка. При вращении рукояткой 6 винта 1 в гайке 2, закрепленной винтом 8 в салазках 4 стола 5, винт / начинает двигаться поступательно. Вместе с ним движется по направляющим салазок стол 5.
Храповые механизмы
Эти механизмы позволяют в широком диапазоне изменять величину периодических перемещений рабочих органов машин. Типы и область применения храповых механизмов разнообразны.
Храповой механизм (рис. 10) состоит из четырех основных звеньев: стойки 1, храповика (зубчатого колеса) 4, рычага 2 и детали 3 с выступом, которая носит название собачки. Храповик со скошенными в одну сторону зубьями насажен на ведомый вал механизма. На одной оси с валом шарнирно закреплен рычаг 2, поворачивающийся (качающейся) под действием приводной штанги 6. На рычаге также шарнирно укреплена собачка, выступ которой имеет форму, соответствующую впадине между зубьями храповика. Во время работы храпового механизма приходит в движение рычаг 2. Когда он движется вправо, собачка свободно скользит по закругленной части зуба храповика, затем она под действием своей силы тяжести или специальной пружины заскакивает во впадину и, упираясь в следующий зуб, толкает его вперед. В результате этого храповик, а с ним и ведомый вал поворачиваются. Обратный поворот храповика с ведомым валом при холостом ходе рычага с собачкой 3 предотвращается стопорной собачкой 5, шарнирно закрепленной на неподвижной оси и прижатой к храповику пружиной. Описанный механизм преобразует качательное движение рычага в прерывисто-вращательное движение ведомого вала.
Валы и оси
Вал представляет собой деталь машины, вращающуюся в подшипниках и служащую для передачи крутящего момента. По конструкции валы делятся на прямые, коленчатые, шлицевые, вал шестерни и др. Особую группу составляют гибкие валы. Валы могут быть гладкими или ступенчатыми. Образование ступеней связано с различной напряженностью посадок отдельных сечений, а также условиями изготовления и удобства сборки. Длинные валы могут состоять из отдельных частей, соединенных муфтами. Валы служат опорой для вращающихся деталей. При работе валы испытывают изгиб и кручение, а в отдельных случаях дополнительно растяжение и сжатие. По типу сечения валы и оси выполняют сплошными и полыми. Полое сечение применяется для уменьшения массы или для размещения внутри других деталей. Валы широко применяются в механизмах и сборочных единицах машин. Вращающиеся части приводов машин — зубчатые колеса, диски, муфты, шкивы и т. п. в большинстве случаев устанавливаются на валах и осях, которые могут иметь различное расположение — горизонтальное, вертикальное, наклонное. Разница между валом и осью состоит в том, что вал вращается и передает усилие через закрепленные на нем детали другим деталям, которые с ними сопрягаются, тогда как ось, вращаясь или оставаясь неподвижной, только поддерживает сидящие на ней детали. Для передачи усилий валы соединяют с зубчатыми колесами, а также со шкивами посредством специальных деталей — шпонок, устанавливаемых частью на валу, частью в сопрягаемой детали, или при помощи шлицевых соединений. Сечение шпонок и шпоночных пазов в соединяемых деталях подбирается в зависимости от диаметра вала и характера сопряжения. Цапфами называют участки вала или оси, лежащие в опорах качения или скольжения. Цапфы в зависимости от их положения на валу делятся на шипы, шейки и пяты. Шип расположен на конце вала и воспринимает радиальную нагрузку. Шейка расположена в средней части вала, также воспринимает радиальную нагрузку и одновременно подвержена действию крутящего момента. Пята - торцовая часть вала или оси и воспринимает только осевые нагрузки. Валы и оси — ответственные детали машин. Опорные части валов очень тщательно обрабатываются для лучшего их сопряжения с соединяемыми деталями. Конструкция валов определяется способом крепления на них деталей, типом и размерами подшипников, которые для них будут служить опорой, технологическими условиями обработки и сборки. Во многих станках применяются шлицевые валы — с неглубокими продольными канавками на поверхности. Канавки чередуются с выступами — шлицами, которые могут быть прямоугольного, треугольного или фасонного профиля. Точно такие же шлицы делают в ступице, сопрягающейся с валом детали, которую можно перемещать по валу. Шлицевые соединения сложнее по устройству и изготовлению, чем шпоночные, зато они обеспечивают точное расположение детали на валу и позволяют передавать очень большие вращающие усилия при меньшем поперечном сечении вала, чем при соединении на шпонке, кроме того, они долговечны и износостойки.
Подшипники Подшипниками называют опоры валов и осей, предназначенные для восприятия радиальных и осевых нагрузок. Радиальной нагрузкой называется усилие, действующее перпендикулярно оси вала. Осевой нагрузкой называется усилие, действующее вдоль оси вала. В зависимости от характера относительного перемещения деталей различают трение двух видов: трение скольжения и трение качения. По виду возникающего в них трения подшипники разделяются на подшипники скольжения и подшипники качения. Подшипники скольжения. Эти детали называются так потому, что между вращающейся шейкой вала и неподвижной опорной внутренней поверхностью подшипников возникает трение скольжения. Первоначальный зазор между шейкой вала и посадочной поверхностью подшипника увеличивается по мере их износа. Скорость увеличения зазора зависит от конструкции подшипника. В промышленном оборудовании применяются подшипники скольжения разных конструкций. Они изготовляются главным образом из антифрикционных материалов, которые обеспечивают:
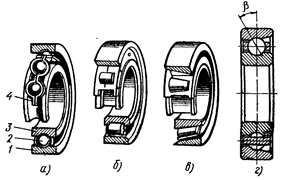
Рис. 11 Подшипники качения: а - радиальный шариковый однорядный, б - радиальный роликовый, в — роликовый конический, г - радиально-упорный шариковый
достаточную прочность и твердость как при нормальных температурах, так и при температурах наибольшего нагрева в процессе работы; наименьшее трение, нагревание и износ; легкую пришабриваемость и быструю прирабатываемость; некоторую микропористость для сохранения смазки в период остановки вала (шпинделя); легкость удаления маслом продуктов износа. В станкостроении подшипники в основном изготовляются из антифрикционных цветных сплавов двух типов: бронз оловянных и алюминиевых, а также баббитов. Подшипники скольжения можно разделить на две основные группы: неразъемные и разъемные. Для подшипников скольжения характерны следующие недостатки: большие потери передаваемой мощности вследствие трения; неизбежность развития начального зазора между вкладышем и посадочным местом, специально образуемого для создания масляного слоя в пределах этого зазора; значительная трудоемкость изготовления подшипников, расход цветных металлов и др. Подшипники качения (рис. 11, а - г) широко применяют во всех отраслях машиностроения. Они представляют собой готовые сборочные единицы, основным элементом которых являются тела качения — шарики или ролики, установленные между кольцами и удерживаемые друг от друга на определенном расстоянии посредством сепаратора 4 (рис. 11, а). В процессе работы шарики 2 (или ролики) катятся по беговым дорожкам колец 1 и 3, одно из которых, как правило, размещают в механизме неподвижно. При трении качения потери передаваемой мощности значительно меньше, чем при трении скольжения. Радиально-упорные шарикоподшипники (рис. 11, г) предназначены для восприятия комбинированных нагрузок (одновременно действующих радиальных и осевых). В подшипниках качения цапфа вала, как правило, опирается на поверхность внутреннего кольца и вращается вместе с ним относительно наружного кольца. Подшипники качения более износостойки, чем подшипники скольжения. Кроме того, они способны работать при разных скоростях без дополнительной регулировки, не нуждаются в большом количестве смазки, не требуют сложного ухода. Наконец, применение подшипников качения характеризуется наименьшими потерями мощности от трения в опорах. В зависимости от характера нагрузок, воспринимаемых подшипниками качения, их разделяют в конструктивном отношении на три группы: радиальные шарико- и роликоподшипники, упорные шарико- и роликоподшипники, а также радиально-упорные ролико- и шарикоподшипники. Ролики по форме могут быть цилиндрическими, бочкообразными, коническими, игольчатыми или витыми. С целью уменьшения радиальных размеров подшипника в некоторых случаях кольца отсутствуют, а ролики катятся непосредственно по цапфе и корпусу. Подшипники каждого из указанных видов делятся на одно-, двух- и многорядные. Однорядные шарико- и роликоподшипники показаны на рис. 11. Двухрядные шарико- и роликоподшипники состоят из тех же частей, что и однорядные, но внутреннее кольцо у них имеет две параллельные дорожки качения, а дорожка качения наружного кольца выполнена в форме сферы. Последним обусловливается название этих подшипников — сферическое. Благодаря сферической форме внутренней поверхности наружного кольца происходит свободная самоустановка подшипника при повышенной несоосности (перекос) гнезд подшипников для вала—в корпусной детали; этим предотвращается защемление шариков или роликов. В связи с этой особенностью сферических подшипников их называют также самоустанавливающимися. В обычных подшипниках качения перекосы вала не допускаются. Многорядные подшипники имеют несколько рядов шариков или роликов.
Соединительные муфты В механизмах промышленного оборудования используются различные соединительные муфты. Одни служат для соединения двух соосно расположенных валов или валов, близких к этому положению, другие муфты — фрикционные — предназначаются для соединения двух валов или соединения вала с посаженной на него деталью. Многодисковые фрикционные муфты применяют также для включения или выключения некоторых механизмов. Постоянные соединения валов получают при помощи жестких и упругих муфт. Жесткими втулочными муфтами соединяют соосно расположенные валы / и 4 при помощи втулки 3 и штифтов " (рис. 14, а) или шпонок. Эти муфты компактны, дешевы, мало изнашиваются. Их, как правило, не ремонтируют, а после износа заменяют новыми. Упругие муфты допускают некоторое отклонение соединяемых валов от соосности, смягчают толчки и удары.
Одна из простейших упругих муфт показана на рис. 14, б. Она состоит из полумуфт 5 и 6, причем в одной полумуфте закреплено четыре или шесть пальцев 7 с насаженными на них кольцами 8 — резиновыми, кожаными или из прорезиненной ткани. Кольца входят в отверстия второй полумуфты, и так как они обладают упругостью, то позволяют осям полумуфт несколько сместиться или перекоситься при работе. Пальцы крепят гайками 9. Для постоянного соединения валов в современных машинах широко применяются кулачково-дисковые (крестовые) самоцентрирующие муфты, являющиеся разновидностью упругих муфт. Крестовыми муфтами можно соединить два вала при отклонении от соосности до 0,04 диаметра вала и угловым отклонением не более 0°30'. Сцепная кулачковая муфта представлена на рис. 14, г. Кулачковые муфты имеют малые габариты, просты по конструкции, изготовление их обходится недорого. Недостаток этих муфт в том, что их включение на быстром ходу без определенных мер предосторожности сопровождается ударом, который может быть причиной аварии. Обгонные муфты широко используются в механизмах для передачи движения в одном направлении, они автоматически замыкаются при одном направлении вращения и размыкаются - при противоположном. Многодисковые фрикционные муфты образуют из двух или нескольких дисков, плотно прижатых друг к другу торцовыми поверхностями. При этом диаметры и количество дисков подбирают в зависимости от передаваемой мощности. Чем больше площадь контакта между дисками, тем больше передаваемая мощность.
Тормозные механизмы
Тормозные устройства предназначены для быстрого останова вращающихся деталей станков и машин. Торможение осуществляется при помощи средств электромеханики, гидравлики, пневматики, механического действия и комбинированных устройств. Тормозные устройства, например конусные, дисковые, колодочные, ленточные и другие, компонуют с приводами оборудования. Они имеют много общего с фрикционными муфтами, отличаются от них тем, что часть деталей лишена возможности вращения. Тормоза часто блокируют с пусковыми устройствами так, чтобы при включении станка или узла тормоз включался, и наоборот.
Практическая часть
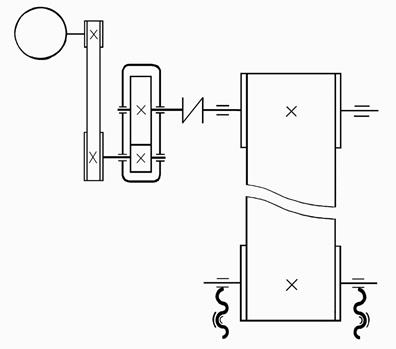
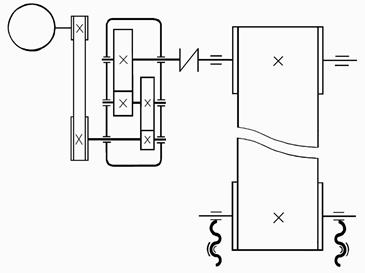
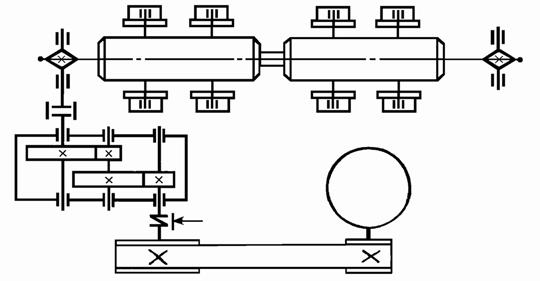
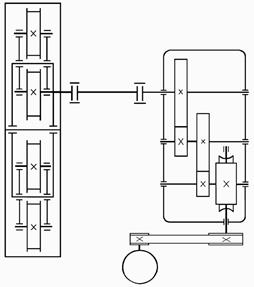
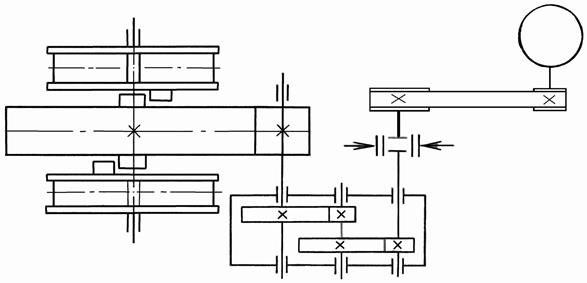
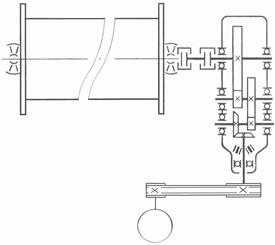
Задание 1. По кинематической схеме, соответствующей варианту: 1. Описать кинематическую схему с указанием основных ее элементов и их назначение; 2. Произвести расчет передаточных чисел по ступеням цепи и для механизма в целом; 3. Определить скорость и характер перемещения рабочего органа механизма, представленного на кинематической схеме.
Задание 2. Пользуясь мерительным инструментом (штангенциркуль, микрометр, штихмас, кронциркуль, глубиномер и т.д.) произвести обмер и начертить на миллиметровой бумаге рабочий эскиз детали, предложенной руководителем (для зубчатых колёс рассчитать модуль). При выполнении эскиза руководствоваться ЕСКД. Пример выполнения описания и расчета кинематической цепи (к Заданию 1)
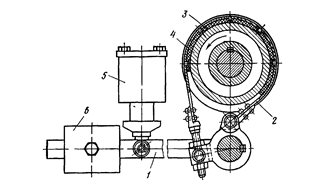
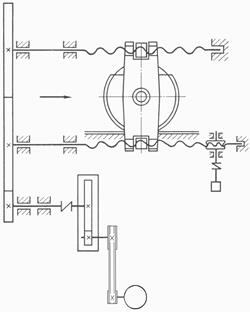
Схема 1. Кинематическая схема к выполнению задания 1. На схеме представлена кинематическая цепь, состоящая из электродвигателя, мощностью Р =1.1кВт и частотой вращения ротора n =1500 об/мин клиноременной передачи, одноступенчатого редуктора, тихоходный вал которого через муфту соединен с рабочим органом (барабаном ленточного конвейера). Первая ступень кинематической цепи представлена ремённой передачей с двумя шкивами: d1 = … мм смонтирован на приводном валу двигателя; d2 = … мм смонтирован на первичном (быстроходном) валу редуктора; вращательное движение передается клиновыми ремнями, передаточное отношение передачи: u1= d2 / d1=… Вторая ступень представлена редуктором с цилиндрической зубчатой передачей с ведущим зубчатым колесом z1=…, и ведомым зубчатым колесом z2=…. смонтированными на валах, вращающихся в подшипниках в корпусе редуктора, Передаточное отношение ступени u2= z2 / z1=… Рабочим органом схемы является приводной барабан ленточного конвейера, смонтированный на раме и вращающийся в подшипниковых опорах. Скорость вращения барабана и передаточное число цепи: 1. Частота вращения ротора двигателя n =… 2. Частота вращения быстроходного вала редуктора ω2 = ω1 / u1 3. Частота вращения тихоходного вала редуктора (барабана конвейера) ω3 = ω2 / u2 4. Общее передаточное число в цепи: uобщ= u1 u2 =… Регулировка натяжения ленты конвейера осуществляется натяжным механизмом А, представляющим собой передаточное устройство винт – гайка, преобразующее вращательное движение винта в поступательное движение опор холостого барабана конвейера. Пример выполнения эскиза детали – вала (к Заданию 2)
Контрольные вопросы
1. Какие типы машин вы знаете? 2. Дайте определение детали, механизму, кинематической паре, сборочной единице. 3. Что такое передаточное отношение, передаточное число? 4. Как осуществляется передача движения в ременных передачах? 5. Что такое цепная передача, чем она осуществляется, где используется? 6. Каким образом работает фрикционная передача? Что такое вариатор скоростей? 7. Какие виды зубчатых передач вы знаете, где они используются? 8. Назовите механизмы, преобразующие вращательное движение в поступательное. Как они работают? 9. Что такое вал, ось? В чем их отличие? 10. Какие виды подшипников используются в механизмах и машинах? 11. Каково назначение муфт? Какие они бывают?
Рекомендуемая литература. Учебное издание
Еременко Алексей Юрьевич
Старооскольский технологический институт (филиал) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-21; Просмотров: 355; Нарушение авторского права страницы



 . По мере удаления ведущего колеса от оси ведомого передаточное число, наоборот, увеличивается. Такое плавное регулирование скорости называется бесступенчатым, а устройство, осуществляющее регулирование - вариатором скоростей.
. По мере удаления ведущего колеса от оси ведомого передаточное число, наоборот, увеличивается. Такое плавное регулирование скорости называется бесступенчатым, а устройство, осуществляющее регулирование - вариатором скоростей.

 =
=  (9)
(9)