|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Синтез технической структуры АСУТП на основе конденсации графовой функциональной модели системы
(В.Я. Войтенко, А.В. Кузнецов «Приборы и системы управления», №4, 1991г.)
Рассмотрим синтез оптимальной по числу технических элементов структуры АСУТП для одного ее уровня, например, нижнего (локального) уровня иерархии АСУТП, с дальнейшим обобщением и применением полученных результатов для синтеза ее последующих уровней. Будем считать, что рассматривается структура технических средств АСУТП, включающая в качестве элементов технические устройства (например, контроллеры) и линии управления, контроля и сигнализации в качестве линий связи. Постановка задачи и ее математическая модель Техническую структуру локального уровня АСУТП, на которую возлагается решение некоторого множества L предназначенных для автоматизированного выполнения задач (функций), определим отображением d множества L={ℓ j}, j=1,.., k на множество M={mi}, i=1,.., n технических документов (процессоров) АСУ, которые необходимо использовать для построения технической структуры (ТС) локального уровня АСУТП, т.е. d: L → M → {ℓ j} → {mi} (1) при условии экстремума некоторого критерия оптимальности Qопт ТС АСУТП, характеризующего степень рациональности выбора числа n технических элементов АСУТП с учетом связности задач системы и удовлетворения следующих ограничений: 1. однородность элементов ТС АСУТП и равнозначности связей между задачами одного уровня; 2. согласованности величин информационной емкости Ij задач ℓ j локального уровня управления с допустимыми объемами памяти Vj* устройств ЭВТ, реализующих технические элементы АСУТП; при этом из-за предыдущего ограничения справедливо равенство V1*=V2*=…=Vn*=V*; 3. не превышения времени tj решения (обработки) задач ℓ j некоторых пороговых (допустимых) значений Ti*, определяемых динамикой технологического процесса (ТП); 4. замкнутости (разомкнутости) межэлементного шинного интерфейса ТС АСУТП одного уровня. С учетом сделанных ограничений синтез оптимальной ТС АСУТП сводится к определению требуемого оптимального числа n однородных технических элементов АСУТП, необходимых для решения задач локального уровня АСУТП, и распределению связей между этими элементами. Другими словами, нужно определить минимальное число, а также состав и взаимосвязи подмножеств сильно связанных задач, каждое из которых решается своим техническим элементом mi; при этом число задач, входящих в состав таких подмножеств, может принимать значения от 1 (тогда число подмножеств равно k) до k (число подмножеств равно 1), а значит, и число n требуемых для их решения технических элементов согласно выражению (1) может варьироваться от k до 1. Сильно связными будем полагать взаимно связные, а слабо связными – односторонне связные задачи рассматриваемого уровня иерархии ТС АСУТП. Формализацию поставленной задачи проведем на базе математического аппарата теории графов.В этом случае она может быть сформулирована следующим образом: найти минимальное значение величины n, равное минимальному числу сильно связных компонент графа Gi; i=1,..n, информационного графа G: G=(‹L, V, T›, ‹F, W›), где L={ℓ j}, j=1,.., k – множество автоматизируемых задач АСУТП локального уровня, соответствующих вершинам графа G; V={vj}, j=1,.., k – множество, каждый элемент которого определяет требуемый в процессе решения j-й задачи объем памяти, непосредственно зависящий от значения информационной емкости Ij задачи ℓ j, т.е. vj=f(Ij); T={tj}, j=1,..k – множество, каждый элемент которого определяет время, требуемое для решения j-й задачи; F={fjs}, j=1,.., k; s=1,.., k – множество связей (дуг графа G) между задачами, причем равенство индексов j=s допустимо, что соответствует связи каждой вершины графа G с самой собой посредством дуги, называемой петлей, изображение которой на графе, как правило, опускается с целью упростить его схему; W={wjs}, j=1,..k; s=1,.., k – множество весов соответствующих дуг графа G, соединяющих его вершины; вследствие ограничения, сформулированного в п. 1) каждый элемент wjs множества W положим равным 1 (wjs=1), причем таких сильных компонент, что
и обеспечивается условие: Qопт → max при ограничениях
Рассмотрим на примере решение сформулированной задачи определения минимального числа, а также состава и взаимосвязей подмножеств сильно связных задач управления, контроля и сигнализации локального уровня АСУТП, каждое из которых будет решаться своим техническим элементом mi.
Пусть в результате функционального анализа объекта управления (ТП) установлено множество L={ℓ j}, j=1,.., k задач, решение которых подлежит автоматизации. Описаны также все условные и безусловные, непосредственные и косвенные, прямые, обратные и взаимные, а также другие связи между ними, на основе чего выстраивается информационный граф G, вершинами которого являются сами задачи ℓ j и их атрибуты (vj, tj), а ориентированными дугами – связи fjs между задачами. На рис. 4.6.1. дан пример такого графа G.
Рис. 4.6.1. Пример графа G Алгоритм решения задачи
Поставленная задача решается на основе реализации процедуры конденсации G* графа G путем отыскания его сильных компонент, число которых априорно неизвестно. Граф G* называемый конденсацией графа G, определяется следующим образом: каждая его вершина mi соответствует множеству вершин некоторой сильной компоненты Gi графа G, т.е. mi~Gi=
Сильными компонентами графа Gi будем считать максимальные подграфы графа G, обладающие заданным свойством. Поскольку в данном случае в качестве такого свойства выступает сильная связность вершин графа G, его сильные компоненты будут представлять собой подмножества (порожденные подграфы) взаимно связных вершин. Требуется найти его сильные компоненты и построить конденсацию G*. Эта процедура реализуется при использовании матриц достижимости RG и контрдостижимости QG графа G. Матрица достижимости RG=||rjs|| определяется следующим образом:
1, если вершина ℓ s достижима из вершины ℓ j (т.е. ℓ j→ ℓ s) rjs= 0, в противном случае, т.е. ℓ j → ℓ s.
Вершина ℓ s считается достижимой из вершины ℓ j, если существует путь от вершины ℓ j к вершине ℓ s. Все диагональные элементы матрицы RG равны 1, т.к. каждая вершина достижима из самой себя путем длиной 0. В качестве алгоритма построения матрицы достижимости RG можно предложить следующий: Вход: Матрица AG смежности графа G, состоящая из строк A1, A2, …, Aj, …, Ak; Aj=(aj1, …, ajs, …, ajk) Выход: Матрица достижимости RG, состоящая из строк R1, R2,..., Rj, …, Rk, где
Rj=(rj1, …, rjs, …, rjk)
Алгоритм запишем в виде, использующем псевдоалгол: Начало 1. для j от 1 до k шаг 1 цикл А 2. сформировать множество S индексов s таких, что ajs=1; 3. Rj: = Aj ; k: =0; 4. пока S≠ 0 цикл В 5. выбрать sєS; 6. Rj: =Rj 7. S: =S\{s}; 8. K: =K 9. Сформировать множество Ss индексов r таких, что asr=1; 10. S: =S 11. конец цикла В; 12. возврат Rj; 13. конец цикла А; Конец
Для примера матрица смежности AG имеет вид:
Применяя описанный выше алгоритм, получаем следующую матрицу достижимости RG:
Матрица контрдостижимости QG=║ qjs║ определяется следующим образом: 1, если из вершины ℓ s графа G достижима вершина ℓ j (т.е. ℓ j← ℓ s) qjs= 0, в противном случае, т.е. ℓ j ← ℓ s. При этом qjs=1, если j=s. Очевидно, что матрица QG есть транспонированная матрица RG. Для нашего примера имеем:
На следующем этапе алгоритма выполняется поэлементное умножение матриц RG и QG графа G, в результате чего получаем RG
При этом строка ℓ j матрицы RG Следующий шаг алгоритма – преобразование матрицы RG
Анализ матрицы (RG
На основе блочно-диагональной матрицы (RG
Рис. 4.6. 2. Конденсация G* графа G
В соответствии с определением конденсации графа и его сильных компонент, а также с учетом принятых ограничений (2) и (8) для элементов графа G* справедливы соотношения:
где i=1, 2, 3 для рассмотренного примера. Кроме того, имеют место соответствия: f21*~f21; f23*~f24; f31*~f31 Таким образом, для построения оптимальной по числу элементов n ТС АСУТП определены все ее составные части: число n технических элементов, состав подмножеств сильно связных задач, решаемых каждым из них, а также взаимосвязи между элементами ТС локального уровня АСУТП. Если в ограничении, сформулированном в п. 4, задана замкнутость межэлементного шинного интерфейса данного уровня ТС АСУТП, то на основании результатов анализа блочно-диагональной матрицы (RG Выстраивается искомая децентрализованная ТС АСУТП в целом с единственным (локальным, первым, нижним) уровнем иерархии (см. рис. 4.6.3).
Рис. 4.6.3. Децентрализованная одноуровневая оптимальная ТС АСУТП Если в ограничении на ТС АСУТП определена разомкнутость соответствующего интерфейса или требуется построение многоуровневой иерархической ТС АСУТП, то, с учетом связей fiu*, составляется информационный граф G(2) задач второго уровня ТС. Этот граф выстраивается по результатам функционального анализа множества задач (функций) этого уровня, лежащих в плоскости среза локального уровня, но решаемых соответственно на втором уровне иерархии ТС АСУТП. После этого относительно данного уровня ТС повторяется вся ранее описанная процедура синтеза. Аналогично выстраивается и все последующие уровни иерархической структуры АСУТП. Физический эффект оптимизации обусловлен следующим: во-первых, сокращением числа связей между задачами каждого уровня ТС (на основе их внутреннего представления в соответствующих технических элементах), требующих взаимодействия различных элементов одного уровня, что увеличивает оперативность обмена информацией при соблюдении ограничений, определяемых выражениями (2) и (3), во-вторых, распараллеливанием решения только слабо связных задач фиксированного уровня ТС АСУТП. При этом сильно связные задачи, образующие свою сильную компоненту в информационном графе задач соответствующего уровня, предлагается решать последовательно на одном своем техническом элементе, т.е. задачи разных сильных компонент решаются параллельно, а в составе одной сильной компоненты – последовательно. При этом следует иметь в виду следующее: - если каждая задача решается своим техническим элементом, то это дает возможность параллельной обработки всех задач одного уровня ТС, что приводит к увеличению оперативности обработки. Однако при этом возможна задержка при организации обмена между элементами, т.е. имеют место их простаивания в ожидании исходной информации. Кроме того, усложняются протоколы обмена, системные алгоритмы, модели и программы управления системой, заметно поднимается и стоимость такой системы. - если все задачи решаются одним элементом (одномашинная или однопроцессорная вычислительная система), то здесь имеется возможность внутреннего представления всех связей между задачами, что устраняет задержки обмена и простаивания технических элементов, ожидающих в качестве исходных данных для решения своей задачи, результатов решения других задач на других элементах. Однако здесь возможно появление задержки из-за образующихся очередей задач на обслуживание, т.к. нет возможности для их параллельной обработки. Приведенные доводы свидетельствуют в пользу предлагаемого метода синтеза оптимальной ТС АСУТП, свободного от перечисленных недостатков.
Лекция 1
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-29; Просмотров: 325; Нарушение авторского права страницы
 : Gi≠ 0, Gi∩ Gu=0, i, u=1,.., n; u≠ i
: Gi≠ 0, Gi∩ Gu=0, i, u=1,.., n; u≠ i  =G
=G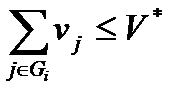 (объем памяти процессора) (2)
(объем памяти процессора) (2)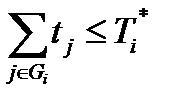 (время решения всех задач i-ым процессором) (3)
(время решения всех задач i-ым процессором) (3) (разным сильным компонентам из графа G отвечают разные вершины в конденсации G*); дуга fiu* существует в конденсации G* тогда, когда в графе G имеется такая дуга fjs, что вершина ℓ j принадлежит сильной компоненте графа Gi, соответствующей вершине mi в конденсации G*, а вершина ℓ s – сильной компоненте графа Gu, отвечающей вершине mu в конденсации G*, т.е.
(разным сильным компонентам из графа G отвечают разные вершины в конденсации G*); дуга fiu* существует в конденсации G* тогда, когда в графе G имеется такая дуга fjs, что вершина ℓ j принадлежит сильной компоненте графа Gi, соответствующей вершине mi в конденсации G*, а вершина ℓ s – сильной компоненте графа Gu, отвечающей вершине mu в конденсации G*, т.е. ~
~  ~
~ 
 As;
As;  {s};
{s};  QG:
QG: 
 ~
~ 
 ~
~