
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Контроль и исправление пути
При выполнении полета вследствие изменения ветра, неточного выдерживания заданного режима полета и ошибок в навигационных измерениях и расчетах самолет может уклониться от ЛЗП и выйти на заданные пункты маршрута в неназначенное время. В целях точного следования по заданной трассе (маршруту) и точного по времени выхода на контрольные ориентиры, поворотные пункты и аэродром посадки, экипаж в процессе полета должен непрерывно вести контроль пути и вносить необходимые исправления в режим полета. Ориентировка, контроль и исправление пути взаимно связаны между собой и являются единым процессом работы экипажа по осуществлению самолетовождения. Контроль пути состоит в проверке соответствия фактического движения самолета по заданному маршруту и соответствия времени прохода намеченных пунктов в заданное время. В зависимости от цели и возможностей определения в полете тех или иных элементов движения контроль пути подразделяется на контроль по направлению, по дальности и на полный контроль пути. Какой из перечисленных способов следует применить в каждом конкретном случае, решает штурман в зависимости от условий полета. Контроль пути по направлению заключается в определении фактического путевого угла и. бокового уклонения от ЛЗП. Главное внимание при этом должно быть уделено наблюдению за сохранением рассчитанного курса следования. Особенно важно контролировать направление полета при отходе от ИПМ (ППМ), так как несвоевременное обнаружение ошибок в курсе, неправильных показаний курсовых приборов, ошибок в расчетах курса, ошибок в записи может привести к потере ориентировки. В целях исключения грубых ошибок в направлении полета при отходе от ИПМ (ППМ) штурман обязан в момент отхода сличением показаний всех курсовых приборов (указателей курсовой системы) убедиться в правильности взятого курса и проверить взятое направление по наземным ориентирам (при видимости земли), радиолокационным ориентирам,
радиотехническим системам и небесным светилам (при полете за облаками). В зависимости от условий полета и оборудования самолета контроль пути по направлению осуществляется следующими способами: 1) визуально по наземным линейным ориентирам, идущим параллельно ЛЗП; 2) по последовательным отметкам места самолета; 3) по результатам периодических измерений угла сноса в полете; 4) по пеленгам радиостанций и радиопеленгаторов, расположенных на ЛЗП, а также по данным радиолокаторов, расположенных как на ЛЗП, так и в стороне от нее; 5) по данным угломерно-дальномерной системы, навигационного индикатора и измерениям, произведенным бортовым радиолокатором; 6) по астрономической линии положения самолета, проложенной на карте параллельно ЛЗП (светило сбоку). Контроль пути по дальности состоит в определении пройденного или оставшегося до ППМ (КПМ) расстояния и своевременности прохода заданных ориентиров. При контроле пути по дальности основное внимание уделяется наблюдению за сохранением рассчитанной воздушной скорости. В зависимости от навигационной обстановки и оборудования самолета контроль пути по дальности осуществляется следующими способами: 1) визуально по линейным ориентирам, пересекающим линию пути, или по характерным боковым ориентирам, расположенным на траверзе; 2) прокладкой пройденного расстояния от последней отметки места самолета по времени и путевой скорости полета; 3) прокладкой радиопеленгов от боковых РНТ; 4) по данным угломерно-дальномерной системы, навигационного индикатора и измерениям, произведенным с помощью бортового радиолокатора; 5) прокладкой астрономической линии положения самолета на карте перпендикулярно к линии пути (светило впереди или позади самолета). Полный контроль пути состоит в определении места самолета относительно заданного маршрута, требуемого направления и скорости полета для точного выхода в пункт назначения по месту и времени. Он является основным способом контроля пути и дает возможность судить о правильности выдерживания направления движения самолета в данный момент времени и о положении его по дальности. В зависимости от навигационной обстановки и оборудования самолета место самолета может быть определено одним из следующих способов;
1) визуальной ориентировкой; 2) прокладкой пути по пройденному расстоянию и направлению полета от последнего достоверно пройденного ориентира; 3) прокладкой радиопеленгов от РНТ; 4) использованием бортового радиолокатора, навигационного индикатора и систем самолетовождения; 5) прокладкой астрономических линий положения; 6) получением места самолета от службы движения. Для успешного ведения контроля пути необходимо все имеющиеся в распоряжении экипажа средства применять в комплексе. Это позволит надежно проверять точность полета самолета по заданному маршруту. Исправление пути. Если в результате контроля пути обнаружено уклонение самолета от ЛЗП или неточный проход по времени заданного пункта, необходимо внести соответствующие изменения в режим полета. Исправление пути самолета следует производить только в том случае, когда достоверно установлено наличие ошибок, величина которых превышает возможные ошибки применяемого способа контроля пути. В зависимости от характера обнаруженной ошибки исправление пути может производиться по направлению с задачей выхода на ЛЗП или по дальности с целью прибытия в пункт назначения в заданное время. Исправление пути по направлению. Современные средства самолетовождения позволяют выполнять полет и вести контроль пути по направлению с точностью до ±2°. Поэтому исправление пути по
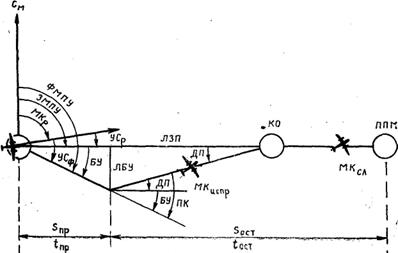
Рис. 10.3. Исправление пути по боковому уклонению
направлению должно осуществляться в том случае, когда боковое уклонение имеет постоянный характер и превышает ±2°. В зависимости от величины бокового уклонения исправление пути по направлению достигается вводом поправки в курс или перерасчетом курса следования по новому значению ЗМПУ. Боковым уклонением (БУ) называется угол, заключенный между линией заданного и линией фактического пути (рис. 10.3.). БУ отсчитывается от линии заданного пути к линии фактического пути вправо (со знаком плюс) и влево (со знаком минус). Исправление пути по боковому уклонению для выхода на очередной контрольный ориентир или поворотный пункт маршрута выполняется в следующем порядке: 1. Определить знак и величину бокового уклонения (БУ). Боковое уклонение может быть определено: а) по пройденному расстоянию и линейному боковому уклонению (ЛБУ); расчет ведется по формуле: tg БУ= ЛБУ/Sпр, которая решается на НЛ-10М (рис. 10.4); б) по формуле: БУ = ФМПУ—ЗМПУ; в) измерением угла на карте между линией; заданного и линией фактического пути. Если исправить курс только на величину БУ, то самолет будет перемещаться параллельно ЛЗП. Чтобы выйти на очередной контрольный ориентир, необходимо дополнительно развернуть самолет на некоторый угол, который называется дополнительной поправкой (ДП). 2. Определить дополнительную поправку (ДП). Дополнительная поправка может быть определена: а) по оставшемуся расстоянию и линейному боковому уклонению; расчет ведется по формуле: tg ДП = ЛБУ/Sост, которая решается на НЛ-10М (рис. 10.5); б) расчетом по формуле: ДП = (Sпр / Sост)·БУ, которая решается на НЛ-10М (рис. 10.6). В самолетовождении принято дополнительную поправку брать с таким знаком, какой знак имеет боковое уклонение. При расчете дополнительной поправки на НЛ-10М вместо пройденного и оставшегося расстояний можно брать пройденное и оставшееся время полета.
4. Определить исправленный курс для выхода на очередной контрольный ориентир по формуле: МКиспр = МКР — (±ПК). 5. После выхода на контрольный ориентир взять курс следования для полета по ЛЗП: МКсл = МКР— (±БУ) или МКсл= ЗМПУ— (±УСф). Фактический угол сноса определяется по формуле УСф = (±УСр) + (±БУ). Пример. ЗМПУ = 90°; МКР = 85°; Sпр= 40 км; ЛБУ = +4 км; Sост = 80 км. Определить боковое уклонение, дополнительную поправку, поправку в курс, исправленный магнитный курс для выхода на очередной контрольный ориентир, магнитный курс для следования по ЛЗП и фактический угол сноса. Решение. 1. Находим на НЛ-10М по Sпр = 40 км и ЛБУ= +4 км величину бокового уклонения: БУ = +6°. 2. По Sост = 80 км и ЛБУ= +4 км определяем на НЛ-10М величину дополнительной поправки: ДП = +3°. 3. Определяем поправку в курс: ПК = БУ + ДП =+ 6° + 3° = + 9°. 4. Рассчитываем исправленный магнитный курс для выхода на очередной контрольный ориентир: МКиспр = МКР — (± ПК) = 85° — (+ 9°) = 76°. 5. Определяем, какой необходимо выдерживать магнитный курс следования после выхода на ЛЗП: МКсл = МКР - (± БУ) - 85° - (+ 6°) = 79°. 6. Находим фактический угол сноса: УСф = УСр + БУ = + 5° + 6° = + 11°. Курс следования при полете в условиях видимости земли рекомендуется исправлять у контрольных ориентиров, где можно визуальной ориентировкой более точно определить боковое уклонение. При полете вне видимости земли курс исправляется сразу же после определения уклонения самолета от ЛЗП. Момент выхода на очередной контрольный ориентир или ЛЗП после введения поправки в курс определяется визуально, а при полете вне видимости земли — с помощью радиотехнических средств. Чтобы успеть исправить курс в намеченной точке или в назначенное время, нужно уметь быстро, подсчетом в уме определять боковое уклонение и поправку в курс. Для определения бокового уклонения подсчетом в уме нужно помнить, что 1 км ЛБУ соответствует 2° БУ, если пройденное расстояние 25—30 км; 1° БУ, если пройденное расстояние 50—60 км; и 0, 5° БУ, если пройденное расстояние 100—120 км. Пример. Пройденное расстояние 30 км; ЛБУ = +5 км. Определить боковое уклонение в градусах. Решение. Так как 1 км ЛБУ соответствует 2° БУ при пройденном расстоянии 25—30 км, находим: БУ = + 10°. Боковое уклонение подсчетом в уме можно определять и другим способом. Для этого нужно ЛБУ умножить на 6 и полученное число разделить на пройденный путь, выраженный в десятках километров. Пример. Пройденное расстояние 80 км; ЛБУ = —7 км. Определить боковое уклонение в градусах. Решение.
Подсчет поправки в курс в уме производится по формуле ПК = БУ + ДП = БУ + (Sпр / Sост) ·БУ = БУ · ( 1 + (Sпр / Sост)). Из формулы видно, что поправка в курс зависит от величины БУ и отношения пройденного расстояния к оставшемуся. Поправка в курс подсчетом в уме определяется по таким правилам: 1. Если пройденное расстояние равно оставшемуся, то поправка в курс равна 2 БУ. 2. Если пройденное расстояние в 2 раза больше оставшегося, то поправка в курс равна 3 БУ. 3. Если пройденное расстояние в 2 раза меньше оставшегося, то поправка в курс равна 1, 5 БУ. Пример. Sпр=100 км; Sост=50 км; БУ = — 4°. Определить поправку в курс. Решение. Пройденное расстояние в два раза больше оставшегося, следовательно, ПК=ЗБУ = 3 — (— 4) = —12°. Исправление пути перерасчетом курса следования по новому значению ЗПМУ производится в тех случаях, когда поправка в курс превышает 30°, а оставшееся расстояние достаточно велико. В практике считают, что угол сноса при незначительном изменении курса не изменяется. Это положение остается справедливым при изменении курса в пределах до 30°. Если поправка превышает 30°, то для исправления пути по направлению следует перерассчитать курс следования. Для исправления пути пересчетом курса следования необходимо: 1) нанести на карту место самолета к моменту исправления курса; 2) проложить новую линию пути от места самолета до ориентира, на который нужно выйти;
3) определить по карте новое значение ЗМПУ и для него рассчитать по известному ветру новый курс следования. Курс следования обычно перерассчитывается после обхода грозы и в тех случаях, когда самолет отклоняется от ЛЗП на значительное расстояние. Исправление пути по дальности состоит в обеспечении прибытия самолета в пункт назначения в заданное время. Если в результате контроля пути будет обнаружено, что самолет прибудет в пункт, назначения не в заданное время, необходимо принять меры для погашения избытка или нагона недостатка времени. Прибытие самолета в пункт назначения (на аэродром посадки) в заданное время может быть достигнуто следующими способами: 1) изменением скорости полета переходом на другой режим работы двигателей в пределах крейсерских режимов; 2) изменением эшелона (высоты), полета с разрешения службы движения с учетом распределения ветра по высотам; 3) увеличением оставшегося расстояния отворотом от маршрута на расчетный угол или выполнением виража (с разрешения диспетчера). Исправление пути по дальности изменением скорости полета. Этот способ исправления пути применяется при избытке или недостатке времени до 2—3 мин. Вследствие ограниченных возможностей его нужно применять на всех участках маршрута. В противном случае при подходе к аэродрому посадки будет трудно, а иногда и невозможно устранить накопившийся по маршруту избыток или недостаток времени. Скорость полета изменяют с учетом величины избытка или недостатка времени и оставшегося расстояния. При опоздании ее увеличивают, а при преждевременном прибытии уменьшают. Потребная истинная воздушная скорость для выхода на пункт в заданное время определяется расчетом. Для этого по оставшемуся времени и расстоянию до заданного пункта находят потребную путевую скорость. Затем определяют разность между потребной и фактической путевыми скоростями и на эту разность изменяют истинную воздушную скорость. Этот способ определения потребной воздушной скорости основан на том, что изменение путевой скорости пропорционально изменению истинной воздушной скорости. Потребную приборную воздушную скорость рассчитывают на НЛ-10М по найденной истинной скорости. Пример. Самолет отошел от ППМ в 9 ч 10 мин; Vи=430 км/ч. Контрольный ориентир пройден в 9 ч 20 мин; Sпр = 90 км. Время прибытия на очередной ППМ в 9 ч 40 мин; Sост = 190 км. Определить потребную истинную воздушную скорость для выхода на ППМ в заданное время. Решение. 1. По пройденному расстоянию и времени полета находим фактическую путевую скорость: Sпр = 90 km; tпр=10 мин; Wф = 540 км/ч. 1 2. По оставшемуся расстоянию до заданного пункта и оставшемуся времени определяем потребную путевую скорость: Sост = 190 км; tост = 0 ч 20 мин; Wпотр = 570 км/ч. 3. Определяем разность между потребной и фактической путевыми скоростями: Δ W = Wпотр — Wф = 570 — 540 = + 30 км/ч. 4. Рассчитываем потребную истинную воздушную скорость: Vи.потр= Vи + (±Δ W) = 430+(+30)=460 км/ч. При значительном запаздывании и невозможности устранения его полностью увеличением скорости полета экипаж обязан установить режим работы двигателей наибольшей крейсерской мощности, уточнить новое время прибытия и сообщить его службе движения. |
Последнее изменение этой страницы: 2019-03-30; Просмотров: 345; Нарушение авторского права страницы

 3. Найти поправку в курс (ПК), которая равна сумме бокового уклонения и дополнительной поправки и определяется по формуле: ПК=БУ+ДП.
3. Найти поправку в курс (ПК), которая равна сумме бокового уклонения и дополнительной поправки и определяется по формуле: ПК=БУ+ДП.