|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основная структура системы цифрового управления процессом.Стр 1 из 4Следующая ⇒
Основная структура системы цифрового управления процессом.
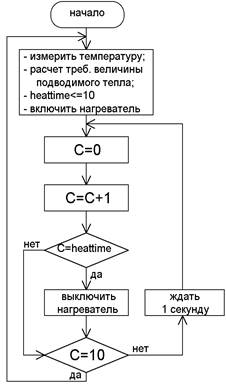
Непосредственное влияние на процесс осуществляется с помощью исполнительных механизмов. Последние преобразуют электрические сигналы в физ. воздействия, главным образом движения. Примером исполнительных механизмов ИМ могут служить, сервомоторы, гидроклапаны и пневматические позиционирующие устройства. ЦСУ работает только с информацией, представленной в цифровой форме, поэтому полученные электрические аналоговые величины необходимо обработать с помощью АЦП. Обратная операция, а именно управление ИМ: например, ЭД и клапанам несколько проще, поскольку компьютер может непосредственно вырабатывать электрические сигналы. Информация от удаленных объектов через каналы связи поступают к центральному управляющему компьютеру, который интерпретирует все поступающие от физ. процесса данные, принимает решения в соответствии с алгоритмами программы обработки, посылает упр. сигналы, обменивается информацией с человеком-оператором и реагирует на его команды. Блок-схема регулирования температуры пластика. Анализируем следующую проблему: могут ли задачи управления в реальном времени решаться с помощью последовательного программирования? Блок схема регулирования температуры расплавленного пластика. представлена на:
Генерация опорного напряжения.
Иногда в химической реакции необходимо поддерживать величину температуры в соответствии с опорным значение или уставкой которое постоянно пересчитывается во время протекания процесса. Вычисление опорной температуры не должно иметь заметного запаздывания, каждое ее новое значение должно быть рассчитано до момента очередного сравнения с текущей температурой. Этот процесс представлен на рисунке.
Рисунок – Генерация опорного значения.
Система отслеживания значения опорного сигнала с достаточной точностью и быстротой называется сервомеханизмом. В сервосистемах опорные значения либо рассчитываются, либо задаются в виде таблиц. Например, в системе управления роботом перемещение манипулятора как функция времени описывается траекторией, траектория рассчитывается заранее, как кривая в пространстве, которая называется путь или контур и хранится в табличном виде в памяти компьютера вместе с заданными интервалами времени. Таким образом, набор опорных значений для контакторов опорного шарниров манипулятора известен в любой момент времени. Однако во многих случаях траектория должна рассчитываться одновременно с перемещением манипулятора робота, что существенно загружает ЦП из-за сложной геометрии манипулятора. Каждое вновь вычисленное опорное значение вновь сравнивается с текущим положением, затем компьютер посылает сигналы коррекции двигателя управления механизмами шарниров. Предусмотрена и обратная операция: определение положения манипулятора по углам поворота шарниров, оба вида расчетов требуют значительных вычислительных ресурсов и критичны по времени.
Взаимосвязанные системы. На сложных производствах одновременно используются разные типы управления и соответственно существуют взаимосвязь между частными процессами. Например, запуск промышленного процесса может заключаться в выполнении ряда последовательных шагов. После достижения процессом заданного рабочего состояния управления переводится на систему регулирования с обратной связью для более точного поддержания требуемого режима. Примерами могут служить системы ЭП и хим. реактор. Двигатель или реактор выводится на рабочий режим при помощи управления последовательных событий, а затем вступает в действие регулятор с обратной связью для поддержания требуемого значения скорости вращения или температуры соответственно. Примером из поточного производства служит иллюстрации другого вида взаимодействия в структуру управления: в технологической линии робот перемещает детали между несколькими станками с ЧПУ. Положение и скорость каждого механизма управляется несколькими контурами регулирования с обратной связью. Очевидно, что механизмы не могут работать независимо и их действия должны координироваться. Для синхронизации работы станков и робота необходимо наличие управляющей системы – диспетчеры. Механизмы посылают диспетчеру сигналы о своем рабочем состоянии (операция выполнена, робот блокирован и т.д.). Диспетчеры определяют соответствие управляющего воздействия для наиболее эффективного использования станков и робота, одновременно пытаясь избежать конфликтных ситуаций. Уровень сложности системы. Уровень сложности технологического процесса отражается на конфигурации управляющего компьютера. Количество и сложность механизмов определяет необходимое число портов ввода-вывода и в целом требует более мощного процессора, большего объёма оперативной и внешней памяти и т.д. Связь между внутренними переменными процесса и его входные-выходные данные определяют сложность программного обеспечения регулятора. Программы реального времени гораздо труднее тестировать по сравнению с обычными, поэтому их ход должен быть настолько хорошо отрегулирован, чтобы ошибки можно было выявить как можно раньше.
Интерфейс оператора. Хотя теоретически управляющая система или комп. могут функционировать без вмешательства человека, на сегодняшний день всегда необходимо взаимодействии с оператором. Современные графические дисплеи имеют большие возможности отображения сложных данных, включая цветовые палитры с большим числом оттенков и даже мультипликации.
Рис. 19 Общая структура ввода-вывода между процессом и управляющим компьютером
Полоса пропускания и шум. Два важных фактора, а именно ширина полосы пропускания и уровень шума определяют способ передачи сигнала между компьютером и физ.процессом. В передачи сигнала и управлении о.с. полоса пропускания обозначает диапазон частот, в пределах которого АЧХ не меньше заданного значения ( обычно 0,707 от max). Для системных шин полоса пропускания соответствует термину «пропускная способность». При обработке сигналов управления и мониторинга полоса пропускания определяется как диапазон рабочих частот датчика. Только те физ.величины, рабочие частоты которых лежат в полосе пропускания можно надлежащим способом измерить или изменить. Это означает, что скорости реакции датчика достаточно для правильного отображения изменения исходной величины. При этом сигнал не искажается из-за соответствия динамики датчика и процесса. Аналогично исполнительный механизм должен иметь соответствующую полосу пропускания, чтобы реализовать необходимое управляющее воздействие. Чем шире полоса пропускания, тем быстрее будет реакция датчика и исп.механизма. Последнее не всегда является положительным фактором, поскольку в этом случае ус-во более восприимчиво к нежелательным высокочастотным возмущениям. Шум. Любой измерительный сигнал искажается возмущениями и шумом как в процессе формирования, так и в процессе передачи. Одна из основных проблем передачи сигнала – это уменьшение влияния шума. Источники шума должны быть изолированы или их влияние должно быть снижено до минимально возможного уровня. Искажение сигналов или сообщений шумом является не только проблемой организации интерфейса процесс-компьютер, но и проявляется при любых типах передачи информации. Регуляторы обычно проектируются в расчёте на наличие возмущений и шумов. Статические хар-ки датчиков СХД показывают на сколько корректно выхода датчика отражает измеряемую величину спустя некоторое время после её измерения когда вых. сигнал установился на новое значение. Важные СХД: 1 чувствительность- определяется как отношение вых. сигнала к единичной вх. величине. 2 разрешение- наименьшее изменение измеряемой величины которая может быть зафиксировано и показано датчиком. 3 линейность- определяется исходя из градуировочной кривой датчика, она показывает зависимость вых. сигнала от вх.. 4 статическое усилие( усилие по постоянному току) – это коэффициент усиления датчика на очень низких частотах. 5 дрейф нуля- определяется как отклонение показаний датчика когда изм. Величина остаётся постоянной в течение длительного времени. Дрейф датчика вызывается не стабильностью усилителя изменением окружающих условий. 6 рабочий диапазон- определяется допустимым верхним и нижнем пределами значений входной величины или уровня выходного сигнала. 7 повторяемость- характеризуется как отклонение между несколькими последними измерениями при заданном значении изм. величины в одинаковых условиях. 8 воспроизводимость- как 7, но требует большего интервала между измерениями, между проверками на воспроизводимость датчик должен использоваться по назначению и может быть подвергнут калибровке. Бинарные и цифровые датчики В системах управления последовательностью событий в основном применяется сигналы вкл/выкл., вырабатываемые бинарными датчиками. Бинарные датчики мспользуються для определения положения при механических перемещениях для подсчета элементов в дискретных потоках для контроля достиж. предельных значений уровня или давления, или крайних положений подвижных частей. Бинарные и цифровые датчики бывают как простыми, состоящ. только из выключателя, так и более сложными. Например, некоторые цифровые датчики в действительности представляют собой полнофункциональный микрокомпьютер, встроенный в автономное устройство и выраб либо сигналы вкл/выкл, либо кодированные. ЦИФРОВЫЕСИСТЕМЫ АВТОМАТИЗАЦИИ И УПРАВЛЕНИЯ 1 Основная структура системы цифрового управления процессом. – 1 2 Управление процессом в реальном времени. – 2 3 Управление прессом для пластика. – 3 4 Блок-схема регулирования температуры пластика. – 4 5 Управление на основе прерываний. – 5 6 Блок-схема управления движением поршня пресса для пластика. – 6 7 Использование прерываний от таймера для регулирования температуры пластика. – 7 8 Использование прерываний для управления дв-ем поршня пресса для пластика. – 8 9 Простой химический реактор с регулированием температуры. – 9 10 Простой контур управления - регулятор температуры. – 10 11 Генератор опорного напряжения - 11 12 Системы, содержащие несколько контуров управления. – 12 13 Взаимосвязанные системы. – 13 14 Критичные по времени процессы – 14 15 Свойства процессов, усложняющие управление. – 15 16 Задачи, решаемые компьютером при управлении процессом. – 16 17 Отображение развития процесса во времени – 17 18 Сбор данных измерений и обработка сигналов. – 18 19 Уровень сложности системы – 19 20 Интерфейс оператора – 20 21 Общая структура ввода/вывода между процессом и управляющим компьютером. – 21 22 Исполнительные устройства (механизмы) – 22 23 Полоса пропускания и шум – 23 24 Передача измерительных сигналов – 24 25 Погрешность и точность датчиков. – 25 26 Динамические характеристики датчиков. – 26 27 Статические характеристики датчиков. – 27 28 Бинарные и цифровые датчики. – 28 Основная структура системы цифрового управления процессом.
Непосредственное влияние на процесс осуществляется с помощью исполнительных механизмов. Последние преобразуют электрические сигналы в физ. воздействия, главным образом движения. Примером исполнительных механизмов ИМ могут служить, сервомоторы, гидроклапаны и пневматические позиционирующие устройства. ЦСУ работает только с информацией, представленной в цифровой форме, поэтому полученные электрические аналоговые величины необходимо обработать с помощью АЦП. Обратная операция, а именно управление ИМ: например, ЭД и клапанам несколько проще, поскольку компьютер может непосредственно вырабатывать электрические сигналы. Информация от удаленных объектов через каналы связи поступают к центральному управляющему компьютеру, который интерпретирует все поступающие от физ. процесса данные, принимает решения в соответствии с алгоритмами программы обработки, посылает упр. сигналы, обменивается информацией с человеком-оператором и реагирует на его команды. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 304; Нарушение авторского права страницы
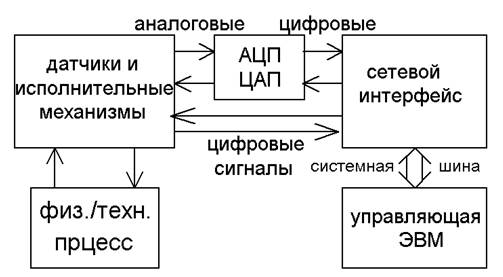 Физ. процесс контролируется с помощью датчиков, т.е. устройств преобразующих физ. параметры процесса (температуру, давление или координаты) в эл. величины, которые непосредственно измерить (сопротивление, ток или разность потенциалов). Примерами датчиков явл. термисторы, концевые выключатели и ультразвуковые зонды.
Физ. процесс контролируется с помощью датчиков, т.е. устройств преобразующих физ. параметры процесса (температуру, давление или координаты) в эл. величины, которые непосредственно измерить (сопротивление, ток или разность потенциалов). Примерами датчиков явл. термисторы, концевые выключатели и ультразвуковые зонды.