|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Апарати автоматичні, реле, датчики, автоматичні регулятори й стабілізатори, підсилювачі й перетворювачі
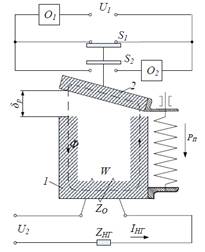
Апарати автоматичні. Вони працюють на невеликих напругах (до сотень вольт) і невеликих струмах (до 5 А) і виконують функції контролю якого-небудь електричного чи неелектричного вхідного параметра (у першому випадку – реле, в іншому – датчик). Коли вхід-ний (контрольований) параметр реле досягає заданої величини, відбу-ваються спрацьовування електричного реле і поява сигналу на виході. Це здійснюється розмиканням чи замиканням контактів (контактні реле) або різкою зміною напруги на виході (безконтактні реле). У датчиках характер залежності вихідного сигналу від вхідного інший – вона має плавний вигляд: мала зміна сигналу викликає пропорційну невелику зміну сигналу на виході. Електромагнітні реле контролюють значення струму Iнг в колі навантажувального резистора Zнг (рис.5).
Рис.5. Найпростіше електромагнітне реле
Обмотка реле W включена послідовно в коло контрольованого струму Iнг. Ії опір Zо практично не впливає на величину Iнг, тому що Zнг >> Zо струм, що протікає по обмотці, Інг створює в магнітопроводі магнітний потік Ф, в результаті чого виникає електромагнітна сила Рем притягання якоря 2 до магнітопровода 1. Із зростанням струму ця сила зростає і при досягненні струмом Iнг критичного значення Рем виявляється достатньою для подолання сили поворотної пружини РП, якір притягається, контакти О1 розмикаються і відключають об'єкт керування О1, а контакти О2 замикаються і включають об'єкт керування О2 під напругу U1. Коли струм Iнг знизиться до певного значення, електромагнітна сила буде недостатньою для утримання якоря. Під дією сили пружини Рп він перейде в початкове положення і контакти О1 і О2 будуть переключати об'єкти О1 і О2. Таким чином, це реле здійснює автоматичне керування об'єктами навантаження в залежності від величини струму. Теплове реле – реагує на величину струму, що протікає нагрівальним елементом НЕ, який включається в коло струму навантаження Iнг. Що більший цей струм, то вища температура нагрівання НЕ – 2 (рис.6), котра передається консольній закріпленій біметалічній пластині 1. Вона складається з двох шарів: металу з високим температурним коефіцієнтом лінійного розширення і металу з низьким коефіцієнтом. При нагріванні пластина 1 згинається. Вимірювальні пристрої реле включають до електричнлої схеми установки. Струмові реле реагують на струм, що протікає по обмотці. Реле напруги спрацьовують, якщо контрольована напруга стане вище (реле максимальної напруги) чи нижче заданої (реле мінімальної напруги). Реле потужності реагують на зміну потужності, реле напрямку енергії – на зміну напрямку потоку електричної енергії.

Рис.6. Принцип дії біметалічних теплових реле (а) і способи нагрівання пластин (б) Дистанційне реле опору (активного, індуктивного чи повного) вимірює величину електричного опору від місця установки реле до місця пошкодження в мережі, пропорційної відстані (дистанції) між ними і подає відповідний сигнал до схеми автоматичного керування електроустановкою. Напівпровідникові реле за швидкодією, чутливістю, селектив-ністю і надійністю перевершують електромагнітні реле. У ряді випад-ків напівпровідникові реле мають характеристики, які неможливо одержати за допомогою електромагнітних реле. Як напівпровідникові пускачі можна використовувати твердо-тільні реле. Твердотільним реле називається оптико-електронний пристрій, у якому сигнал управління передається через оптичний канал і вмикає (вимикає) потужний вихідний електронний пристрій. Застосування реле: В даний час реле все більше застосовуються в різних електротехнічних пристроях і виробах автоматичних апаратах, зокрема: - для комутації електродвигунів змінного струму; - у системах автоматичного регулювання й управління; - як контактори в колах змінного струму, в імпульсних джерелах живлення, в швидкодіючих системах захисту і т.д. Виділяють наступні основні типи тиристорних реле: – однофазні нормально замкнуті й нормально розімкнені реле (від 1 А до 100 А); – трифазні нормально розімкнені реле (від 10 А до 150 А); – однофазні, двофазні й трифазні реверсивні реле вбудованим захистом від міжфазного замикання і миттєвого реверсу (від 10 А до 40 А); – двоканальні твердотільні реле роздільними каналами або зі на виході з незалежним управлінням каналами (від 1 А і вище). Реле можуть мати контроль нуля фази силової напруги (тобто включатися при значенні цієї напруги, близькому до нуля, типу ТМ) або не мати цього контролю (типу ТС). Включення в «нулі» напруги має ту перевагу, що мінімізує перешкоди при включенні. За управлін-ням реле можуть мати струмові або потенціальні входи. Причому струмові входи можуть бути тільки однофазних і двоканальних реле, потенціальні – у всіх. Для струмових входів струм управління 110–25 мА при падінні напруги на вході близько 1,2 В або 2,4 В. Потенціальне управління варіюється в діапазонах: – постійний (4÷7) і (3÷30) В; – змінний (6÷30) і (110÷280) В. Тиристорні структури чутливі до перенапружень: їх поява веде до пробою, тому актуальним є захист виходів реле від перенапружень. Основним засобом такого захисту є шунтування виходів реле варисторами. Для захисту реле від втрати управління через імпульсні перешкоди застосовується шунтування виходів RC-коло. Для включення й відключення асинхронних двигунів і їх ре-версування можна використовувати трифазні реверсивні реле 5П55.30ТМА, ТМБ. Вони забезпечують включення, виключення і реверс трифазних двигунів. Реле мають оптронну розв'язку сигналів, керуючих від силових кіл, а також вхід сигналу блокування ввімк-нення реле. У реле даного типа забезпечується комутація всіх трьох фаз живлячої напруги. Реле групи ТМА управляються позитивною напругою, ТМБ – негативним. Напруга ізоляції – 1500 В. У схемах широко розповсюджені реле часу і програмні реле. Реле часу може створювати регульовану в широких межах витримку часу, відлічувану від моменту подачі сигналу на вхід реле до моменту спрацьовування оперативного органа. Програмні реле – це різновид реле часу з декількома незалеж-ними контактними групами. Витримки часу від моменту подачі сигналу на вхід цього реле до моменту замикання для тих чи інших контактів – різні і можуть регулюватися в широких межах. Широко розповсюдженими є проміжні (комутаційні) реле, що здійснюють одну з функцій: – збільшення кількості автономних сигналів на виході при подачі на вхід одиничного сигналу (на виході з'являється велика кількість незалежних сигналів); – "посилення сигналу". При подачі на обмотку невеликого струму, достатнього для спрацьовування реле, замикаються контакти, здатні пропустити через себе значно більший струм у порівнянні зі струмом вхідного сигналу. Датчики (первинні перетворювачі) здійснюють контроль неелектричних параметрів, наприклад лінійних і кутових переміщень деталей, тиску газів і рідин, рівнів рідких і сипучих тіл, механічних зусиль і моментів, швидкостей руху і т.д. Принцип дії індуктивного датчика тиску (рис.7) заснований на тому, що зі зміною тиску Р у резервуарі змінюється повітряний зазор δ між якорем Я і магнітопроводом М магнітної системи електро-магнітного пристрою.

Рис.7. а) індуктивний датчик тиску; б) індукційний датчик кутового переміщення
Обмотка ввімкнена на синусоїдальну напругу U≈. Значення струму i, реєстрованого вимірювальним органом ВО, залежить від електричного опору обмотки, що в електромагнітних пристроях є переважно індуктивним: Індуктивність обмотки де Ф – магнітний потік, створюваний струмом i. У найпростішому випадку де Rδ – магнітний опір повітряних зазорів, дорівнює S – площа полюса на магнітопроводі. Тоді де μ0 – магнітна проникність повітря, Гн/м. Отже за контрольованим струмом можна робити висновок щодо значення тиску Р, якому відповідає визначений зазор у магнітній системі. Принцип дії індукційного датчика (рис.7б), що реагує на кутові переміщення рухомої системи заснований на тім, що на крайніх стержнях магнітопровода розміщені дві половини обмотки 2(W/2), на яку подана напруга U≈ змінного струму підвищеної частоти. Якір Я пов'язаний із рухомою системою, кутове переміщення якої контро-люється датчиком. У нейтральному середньому положенні якір розта-шований симетрично стосовно магнітопроводу, коли магнітні провід-ності повітряних зазорів для потоків Ф1 і Ф2 однакові. Потоки Ф1 = Ф2. Таким чином, потік у середньому стержні дорівнює нулю і ЕРС у вихідній обмотці не наводиться. При кутовому переміщенні якоря виявляються неоднаковими магнітні провідності повітряних зазорів і виникає нерівність потоків Ф1 і Ф2. Магнітний потік у середньому стержні стає відмінним від нуля, тому в обмотці W в наведеться ЕРС. Ємнісні датчики змінюють ємність конденсатора від зміни контрольованої величини. Наприклад, якщо в циліндричному конден-саторі частина простору між циліндрами заповнюється рідиною, а інша – повітрям, то в залежності від зміни обсягу заповнення рідиною змінюється результуюча ємність конденсатора і його реактивний електричний опір. За зміною цього опору можна судити про рівень рідини в резервуарі. Магнітопружні датчики використовують ефект зміни магнітної проникності деяких матеріалів із появою в них механічної напруги й деформації. Від магнітної проникності магнітопроводу, на який намотана обмотка, залежить індуктивний електричний опір цієї обмотки. Якщо вона включена в коло змінного струму, то зміна магнітної проникності при механічному впливі в пристрої приведе до відповідної зміни струму. Автоматичні регулятори й стабілізатори призначені для під-тримки на заданому рівні вихідного параметра об'єкта чи керування регулювання. Такими параметрами можуть бути напруга генератора, температура об'єкта чи струм в електричній схемі установки. Стабілізатори (поширені стабілізатори електричного струму, напруги й потужності) поділяються на параметричні, компенсаційні й імпульсні. Дія параметричних стабілізаторів заснована на використанні нелінійних елементів, що включаються до схеми послідовно з ліній-ними елементами таким чином, щоби при широкому діапазоні змін вхідного параметра вихідний параметр змінювався значно менше, ніж вхідний параметр. У компенсаційних стабілізаторах вихідний параметр порів-нюють із заданим, у результаті виробляється різницевий сигнал, що впливає на виконавчий елемент стабілізатора доти, поки цей сигнал не наблизиться до нуля. Імпульсні стабілізатори найбільш економічні, тому що вихідний регулюючий елемент працює в ключовому режимі. При цьому падіння напруги на ньому мінімальне, отже мінімальними є втрати електричної енергії. Підсилювачі здійснюють функцію посилення електричного сигналу. Їхня основна характеристика – залежність вихідного параметра Iвих від вхідного Iвх. Має монотонний характер (без розривів і стрибків) (рис.8), плавна зміна вхідного сигналу викликає плавну зміну вихідного параметра.

Рис.8. Плавна (1) і стрибкоподібна (2) зміни вихідного сигналу Магнітні й напівпровідникові підсилювачі є основою апаратів, що забезпечують стрибкоподібну залежність між Iвих і Iвх. Їх називають безконтактними комутаційними апаратами. Найпростіший магнітний підсилювач – це електромагнітний елемент, індуктивний електричний опір якого змінюється в широких межах. У дроселі насичення є дві обмотки (рис.10). Обмотка навантаження н включена в коло змінного струму iн, обмотка керування wкер – в колі постійного струму iкер. Струм навантаження iн залежить від суми індуктивних опорів: об'єкта навантаження Хн і магнітного підсилювача Хм (Хм залежить від магнітного стану магнітопроводу.) У загальному випадку індуктивний опір дорівнює: де ω – кутова частота струму, що намагнічує; wн – число витків навантажувальної обмотки; Ф – магнітний потік; Rм – магнітний опір магнітопроводу; S, lм – поперечний переріз і довжина сталевого магнітопроводу. Якщо осердя не намагнічується постійним струмом (iкер = 0), то в магнітопроводі буде створюватися лише магнітний потік від струму iн в обмотці wн – він буде невеликий, магнітопровід залишається ненасиченим, його ефективна магнітна проникність висока, а індуктивний опір Х великий (Хм > Хн). Тоді струм навантаження iн = U /(Хн + Хм) буде невеликий.
Рис.10. Схема магнітного підсилювача
Якщо ж здійснити підмагнічування постійним струмом (iкер > 0), то в магнітопроводі будуть існувати два магнітних потоки: від струму iн через обмотку wн і від струму iкер через обмотку wкер. Результуючий магнітний потік і індукція в сталевому магнітопроводі зростуть, матеріал магнітопроводу ввійде в режим насичення, магнітна проникність цього матеріалу різко знизиться й індуктивний електричний опір Хм зменшиться. У колі змінного струму потече повний струм навантаження. У такий спосіб подача струму керування iкер до обмотки wкер "вмикає" повний струм навантаження iн в колі змінного струму, а зняття струму керування "вимикає" струм навантаження. Напівпровідникові підсилювачі будуються на базі транзис-торів, тиристорів та інших подібних приладів. Функцію безупинної (періодичної) комутації струму виконують різні перетворювачі змінного струму в постійний ( і навпаки), перетворювачі одного рівня постійної напруги в інши (перетворювачі напруги) та ін. Питання до самоперевірки 1. Яке призначення апаратів автоматики? 2. Принцип дії найпростішого електромагнітного реле. 3. Призначення дистанційного реле опору. 4. Призначення датчиків. 5. Принцип дії найпростішого магнітного підсилювача. 6. Принцип дії магнітокерованих контактних апаратів (герконів). 7. Принцип дії теплових реле. 8. Призначення і принцип дії біметалічної пластини теплового реле. 9. За якими показниками напівпровідникові реле перевершують електромагнітні? 10. Призначення реле часу і програмних реле. 11. Призначення автоматичних регуляторів і стабілізаторів.
|
Последнее изменение этой страницы: 2019-03-31; Просмотров: 305; Нарушение авторского права страницы