
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Датчики для измерения температур. Полупроводниковые терморезисторы.
Полупроводниковые терморезисторы(термисторы) по сравнению с проводниковыми обладают более высокой чувствительностью.Имеют на порядок выше,чем у меди и платины ТКС.При весьма малых габаритах имеют высокое сопротивление порядком 1Мом.Изготавливают 2 типов:-КМТ(смесь окислов кобальта и марганца);-ММТ(смесь окислов меди и марганца).Имеют функцию преобразования:Rt=AeB/t.Применяютя в диапозоне -100<t<200С.Серьёзным недостатком явл-ся плохая воспроизводимость хар-к,однако они обладают высокой стабильностью характеристик по времени.Применяются для точного измерения температур. 20.Датчики для измерения температур.Термоэлектрические преобразователи. Относятся к генераторным датчикам. Термоэлектрические преобразователи-это пара проводников из различных материалов,соединенных на 1 конце.Принцип действия основан на термоэлектрическом эффекте,который состоит в том,что при наличии разности температур между концами проводников,между ними возникает разность потенциалов пропорциональная разности температур.Эту разность потенциалов называют термоэлектродвижной силой(термо-ЭДС).При равности температур обоих славов результ. термо-ЭДС =0.Конец термопара,погруженной в контролируемую среду называют рабочим концом,а второй-свободный.Свободный подсоединяется проводами к измерительной схеме и его температуру необходимо поддерживать постоянно.При этом результирующая термо-ЭДС будет зависить только от температуры рабочего конца.Ет=с(Т2-Т1)=Uвых,где Т1-температура свободного конца,Т2-температура рабочего конца;с-коэф.обусловленный свойствами материала.Создаваемое ЭДС термопарами сравнительно невелико и не превышает 8мВ на каждые 1000С изменения температуры и обычно по абсолютной величине не превышает 70мВ.Применяют для измерения температур в диапазоне -200-22000С.Наибольшее распространение для изготовления термопаров получили платина,платинородий,хромель.Преимущества:простота изготовления,надёжность в экспуатации, отсуствие источника питания, возможность измерения в большом диапазоне температур. Недостатки:меньше,чем у терморезисторных точность измерения, необходимость введнния поправки на температуру свободных концов и необходимость применения специальных соединительных проводов. 21.Сравнительная хар-ка различных типов датчиков температуры 1) Тип датчика – термометры сопротивления; основные преимущества: высокая линейность статической характеристики, широкий диапазон рабочих температур высокая стабильность основных параметров, устойчивость к воздействию агрессивных сред (ПТС), относительно невысокая стоимость; Основные недостатки: необходимость во внешней схеме для возбуждения; Основные области применения: в системах измерения и контроля температуры. 1) Тип датчика – полупроводниковые термисторы; основные преимущества: дешевизна и доступность, высокиу температурный коэффициент сопротивления; Основные недостатки: необходимость во внешней схеме для возбуждения, высокая нелинейность номинальной статической хар-ки, низкая стабильность основных параметров; Основные области применения: в в недорогих устройствах с низкими требованиями к точности измерений, в простых системах одно- и двухпорогового контроля температуры или для организации контроля температуры во второстепенных узлах сложной радиоэлектронной аппаратуры. 1) Тип датчика – термопары; основные преимущества: самый широкий диапазон рабочих температур, высокая повторяемость характеристик, высокое быстродействие; Основные недостатки: необходимость компенсации опорного спая, низкое выходное напряжение,необходимость использования крупногабаритных конструкций для компенсации опорного спая для достижения высокой точности измерений; Основные области применения: широко использ в бюджетных устройствах с «электронной» компенсацией опорного спая с невысокой точностью измерений, в сверхпрецизионных измерительных системах с компенсацией опорного спая с помощью сосуда Дьюара или специализированных термостатов. 22.Индуктивные датчики. Их устройство принцип работы и область применения. Они относятся к параметрическим датчикам реактивного сопротивления. Питается от источника переменного напряжения. Индуктивные датчики основаны на изменении индуктивных сопротивленийэлектромагнитного дросселя при перемещении подвижной части магнитной системы (якорь). Индуктивный датчик представляет собой эл-ромагнитный дроссель с переменным воздушным зазором δ обмотки кот вкл последовательно с сопротивлением нагрузки и при изменении воздушного зазора изменяется индуктивность обмотки дросселя и полного сопротивления обмотки Lдр=ω2*SB*μ/2*δ, где ω – частоты полной обмотки дросселя, SB – площадь сечения воздушного зазора, μ – магнитная проницаемость стеды, δ – длина воздушного зазора. Магнитопровод 2 и якорь 5 обычно выполняют из магнитомягкого мат-ла. При изменении индуктивности изменяется реактивное сопротивление а следовательно полное. Zдр=r+jxiдр, xiдр=2πfLдр, т.о изменяется ток сопротивления нагрузки. При изменении индуктивности можно определить величину перемещения якоря. Эти датчики используют для изменения перемещения с точностью до 1 мкм. Достоинства: 1) высокая чувствительность; 2) надежность и долговечность; 3) отсутствие контактных устройств; 4) значительная величина выходной мощности; 5) простота конструкции и эксплуатации. 23.Емкостные датчики. Их устройство принцип работы и область применения. Относятся к датчикам реактивного тока и питаются от переменного напряжения. Представляют собой конденсатор в кот емкостное сопротивление изменяется при изменении регулирования неэлектрической величины. С=εS/d, С – емкость конденсатора, ε – относительная диэлектрическая проницательность среды (возд=1), S – активная пл-дь пластин(обхваток) конденсатора, d – расстояние между пластинами, q= εαxC, xC= 1/2πfC. Емкостной дифференциальный датчик: в этом датчике изменяемая величина вызывает расстояние d между пластинами при переменном подводе пластины на расстоянии ±х значение d увеличивается что приводит к уменьшению емкости датчика и соответственно к увеличению реактивного сопротивления и полного, ток уменьшается. Также применяется емкость датчика в кот изменяется за счет диэлектрической проницаемости среды. Датчик применяется для измерения угловых перемещений, очень малые линейные перемещения. Емкостные датчики, диэлектрич проницаемость кот изменяется за счет перемещения деформации или видоизмененного состояния диэлектр прим в качестве датчика уровня в непроводящих ж-стях, сыпучих и порошкообразных мат-лах толщины слоя непроводящего мат-ла а так же контролирует влажность и состав в-ва. Достоинства: 1) высокая чувствительность; 2) отсутствие подвижности трущихся деталей; 3) малые размеры, инерционность. Недостатки: 1) влияние внешних электрических полей; 2) относительная сложность измерительных устройств. 24. Тахометрические датчики. Их устройство, принцип работы и область применения. Они явл-ся инерционными датчиками генераторного типа. Представляют собой маломощные эл-кие машины преобразующие мех-ие вращения в эл-кий сигнал. Т.к генератор передает напряжение пропорционально частоте вращения, применяют в кач-ве эл-их датчиков конструктивно они делятся на генераторы постоянного и переменного тока. При вращении якоря с частотой n с его щеток снимает ЭДС значение кот равно U=E=keФn. ke –коэф зависящий от конструкции схемы якоря, Фn – магнитный поток создаваемый постоянным магнитом. Для данного типа генераторов магнитный поток Ф явл-ся постоянной величиной т.к он создается постоянными магнитами и входным напряжением зависит только от частоты вращения якоря. С увеличением частоты вращения ток растет пропорционально его частоте. Поток возбуждения ФВ создается обмоткой возбуждения, кот расположена на полюсах статеров ФВ=kВIВ kВ – коэф пропорциональности, IВ – ток обмотки возбуждения. В этом случае выходное напряжение зависит только от частного напряжения но и от тока в обмотке возбуждения. 25. Пьезоэл-кие датчики. Их устройство, принцип работы и область применения. Их действия основываются на использовании пьезоэфекта заключается в том, что при сжатии и растяжении некоторых вставок на их гранях появляется эл-кий заряд, величина кот пропорциональна действующей силе. Пьезодатчик представляет собой набор пластин из мат-лов, кот обладает пьезоэфектом. Uвых=αF/C, α – коэф пропорциональности, пьезомодуль, F – сила, C – суммарная емкость датчика. Если датчик явл-ся пьезоинерциионным и используется для измерения силы вибрации, давления. Механические датчики: 1) барометрические; 2) генераторные; 3)индукционного сопротивления. Барометрические(по принципу действия): 1) измерение активного сопротивления; 2) измер индуктивного сопротивления; 3) измер емкостного сопротивления. Генераторные : 1) потенциометрические; 2) тензометрические; 3) тахогенератор. Индуктивные датчики измеряют усилия, уровня ж-сти, массы дозатора, перемещение в узлах машин. 26. Измерительные схемы. Понятия и классификация. Полученная информация в датчиках должна быть соответственным образом обработана и одной из задач явл-ся измерение величины полученного сигнала (его сравнение с эталоном) 3 вида измерительных схем: 1) мостовые; 2) конденсационные; 3) дифференциальные. Конкретный тип схемы определяется примняется первичным преобразователем. Все три вида схем построены по принципу сравнения хар-ся наличием двух цепочек после преобразования одну из кот включ работу преобразователя, а в другом образуется напряжение. Звено сравнения общее для обоих и выдает преобразователей и выдает сигнал разности эталона и получение данных. 27. Мостовые измерительные схемы. Применяются в устройствах где измеряемая величина при помощи датчика преобразуется изменением активного и реактивного сопротивления.. в основу мостовой схемы положена способность соединения сопротивления по схеме Уитсена. Принцип действия моста основан на том, что при рав-ве отношений сопротивления в плечах моста. При выполнении рав-ва в диагонали моста нет тока. Источником питания мостовой схемы могут служить как постоянный ток, так и переменный ток. При чем уравновешивание моста не зависит от колебаний напряжения и 2 типа мостовых схем: 1) нулевой метод (равновесный мост); 2) метод непосредственного отсчетапо прибору (неуравновешенный мост) 28. Мостовая измерительная схема. Равновесный мост. Для равновесного моста разность потенциалов диагональная измерительность приборов должна быть равна 0. Е – источник питания. НГ – нульгальванометр (гальванометр – это высокочувствительный прибор для измерения малых по величине постоянных и переменных эл-ких величин может быть програбуирован в единицах силы тока, напряжения и др физич единиц, или иметь условную безразмерную градуировку. НГ используют в кач-ве указателя (индикатора) отсутствия тока или напряжение в эл-ких цепях он обычно исполняется с нулевым положением стрелки по середине шкалы. R2R3=R1R4, R4=R3/R1 для устранения погрешности контакт реостата R3 оно вывод в диагональных мостах. Уравновешенное соотношение 2-хсмешанных плеч, и для устранения влияния соединения проводников АВ и CD применяют 3-х проводную схему включений. В этом случае соединение провода ab и cd подключ в разные плечи моста. 29. Мостовая измерительная схема. Неуравновешенный мост. R1, R2, R3 – три плеча моста имеют равное постоянное сопротивления. R4 явл-ся ф-цией сопротивления датчика. Между сопротивлением Rx и силой тока диагонали сущ-ет определенная зависимость. Измеренные физич величины вызывают изменения измерения датчика, кот определ по величине тока или напряжения изменения диагонали моста. Измерение прибора может быть отрегулировано в единицы измеряемой величины.неуравновешенные мосты лучше применяют для частных измерений степени отклонения измеряемой физич величины от заданного значения. Показания приборов зависят от напряжения питания моста. 30. Компенсационная схема измерения. Она применяется для измерения сигнала полученного с преобразователя в виде изменения напряжения. В основу работы позиции схем положен метод сравнения и хар-рной чертой явл-ся высокая чувствительность и высокая точность измерения. Применяется в автоматических компенсационных устройствах, выполненных автоматически уравновшивающимися. Такие устр-ва наз-ся автоматическими потенциометрами постоянного или переменного тока. RX – сопротивление источника термоЭДС, ЕХ – определяемая ЭДС, Ry – сопротивление прибора-указателя, Rp – сопротивление проводов, Е – ЭДС источника питания, Iy – ток в цепи прибора указателя, Io – ток в цепи источника питания, If – ток дисбаланса, Rk – часть сопротивления реохорда. Реохорд – это реостат представляющий собой однородный проводник (струны) с подвижным контактом регулированный шкалой. Предварительно подведя контакт реохорда по струне можно достичь измерения величины тока. При постоянном токе Io в момент компенсирования ЭДС в цепи реохорда имеем, что сопротивление реохорда прямопропорционально линейному перемещению движка реохорда, т.е прямопропорционально изменению ЭДС.
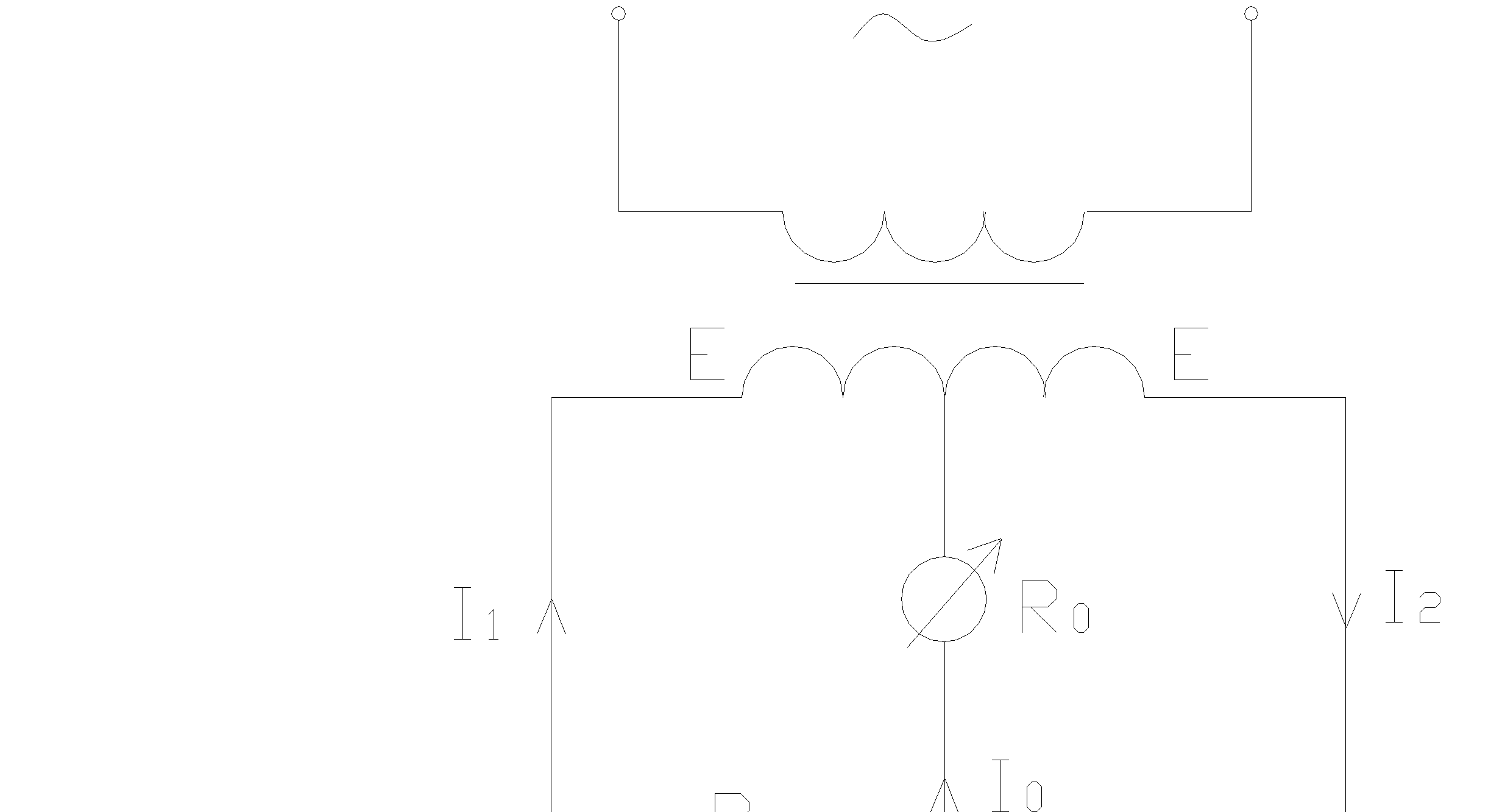
31.Дифференциал. схема измерения: Существует 2 типа схем: а)с изменением ЭДС:
б)с изменением сопротивления:
Диф. схемы представ. собой электрич. цепь, состоящую из 2-х смежных контуров, в каждом из которых действует отдельное напряжение Измерительные преобразователи размещаются в ветви общей для обоих контуров и реагирует на разность токов, действ. в контурах . Возможны 2 режима работы диф.схемы: 1) при неизменном сопротивлении в обоих контурах; изменяется либо 1 либо оба напряжения; 2) при неизменном напряжении; изменяется сопротивление либо в 1 либо в обоих контурах. В средней диф.цепи протекает ток I0, кот. = разности токов I1 и I2. Эта схема применяется при перемен. токе, когда нет внешнего влияния, то ЭДС и сопротивление контуров =, токи I1 и I2 = между собой и и в диф.цепи тока нет. При наличии внешнего воздействия может измен. ЭДС Е 32.Усилители. Классиф.,назначение и основные хар-ки: Предназначены для усиления сигналов, поступающих от датчиков и ЭВМ к исполнительным механизмам. Выходная мощность сигнала датчика
33.Электрические усилители: Предназ. для усиления слабых электрич. сигналов до уровня необходимого для нормального функционирования исполнительного устройства. Усиление слабых электр. сигналов может происходить только засчёт некоторого источника энергии, т е системы питания. От источника питания усилитель потребляет мощность Р0, часть её, отдаваемая нагрузке, назыв. выходной мощностью усилителя, а часть потребляемой мощности, рассеиваемой в виде тепла усилительными и вспомогательными элементами назыв. мощностью потерь (рассеивания). Усилитель явл. нагрузкой для источ. питания и источ. сигнала, и потребляет из источника сигнала мощность называемую Рвх; для усиления электр. сигналов в электрич. усилителях используются такие элементы как транзисторы, интегральные микросхемы. Наиболее широкое применение электрич. усилителей являются усилители на базе операционных усилителей. Они отличаются от других типов своей универсал., надёжностью и высокими эксплуатац. параметрами. Основным преимуществом явл. то, что многие параметры не зависят от параметра самого электр.усилителя, а определяются номинальными значениями внешних элементов (резисторы, конденсаторы). 34. Магнитные усилители: Простейший магнит. усилитель представ. собой 2 однофазных трансформатора с замкнутыми сердечниками из ферромагнитного материала, имеющего кривую намагничивания.
Соединим последовательно первичные обмотки ω1 2-х однофазных трансформаторов и подключим их к источнику переменного напряжения. Вторичные обмотки трансформатора ω2 соединим последов. и встречно. Вследствие чего ЭДС индуцируемая в этих обмотках будут одинаковыми по величине и противоположными по фазе. Они взаимно компенсируются, вседствие чего ЭДС его вторичной цепи трансформатора будет =0. Подадим постоянный ток во вторичную обмотку трансформатора. Этот ток создаёт магнитное поле постоянное с напряженностью Н0, которая вследствие нелинейного хар-ра кривой намагничивания сердечника вызывает уменьшение их динамической магнитной проницаемости μэ и соответственное уменьшение индуктивности L1 первичных обмоток трансформатора. С уменьшение индуктивности первичных обмоток ток I1 в этих обмотках растёт по формуле:
R-активное сопротивление первичной цепи.
С увеличением постоянного тока величина В0 будет постоянной, а Н0 будет увеличиваться. Данное устройство называется дросселем рассечения или управляемым дросселем. Магнитные усилители отличаются устойчивостью к значительным перегрузкам и имеют достаточно большой коэффициент усиления. 35. Гидравлический усилитель. Усилитель с золотниковым управляющим элементом.: Они отличаются большим коэффициентом усиления, надёж., простотой и компактностью конструкции.
1-2 – трубки; 3 – поршень золотникового устройства; 4 – окна ; 5 – поршень рабочего механизма. Рабочая жидкость под давлением Р1 поступает в управляющий золотник через трубку 1, трубка 2 сообщается с внешней средой – через них происходит слив рабочей жидкости. При нейтрал. положении поршня золотника окна 4 перекрыты и давление жидкости в верхней и нижней камерах цилиндра 5 одинаково, если поршень 3 перемест. вверх, то верхнее окно 4 приоткроется и в верх. камеру начнёт поступать жидкость, подаваемая к золотнику под давлением Р1, в это время нижнее окно 4 окажется приоткрытым для слива жидкости из нижней камеры цилиндра. В результате этого давление в верхней и нижней камерах станет различным и на поршень механизма 5 будет действовать сила, пропорциональная разности этих давлений. То же самое произойдёт при перемещении поршня золотника вниз. В этом случае выходное усилие будет действовать в обратном направлении. 36. Гидравлический усилитель. Усилитель со струйной трубкой:
8 – поршень рабочего механизма; 7 – приёмные каналы; 6 – струйная трубка. Конец струйной трубки 6 крепится на шарнире, поэтому может легко смещаться. В трубку подаётся рабочая жидкость под давлением Р1. На небольшом расстоянии от конца струйной трубки распологается 2 приёмных капана 7; струя жидкости выходит под большим давлением из струйной трубки и подаётся в приёмные каналы. При нейтральном положении трубки давление верхней и нижней камеры цилиндра одинаково, но если под действием внешнего усилия коней струйной трубки сместится вверх, то давление в верхней камере станет больше, а в нижней меньше и на поршне будет действовать сила, пропорциональная разности этих давлений. Реагирует на малые перемещения.
37. Пневматические усилители:
1- труба; 9- сопло; 10- заслонка; 11- дроссель; 12- исполнительное устройство. В трубку 1 нагнетается воздух через сопло 9, которое может прикрываться заслонкой, воздух выходит наружу. При изменении положения заслонки изменяется сопротивление выхода воздуха через сопло и в результате изменяется давление за дросселем 11. Подбор профиля заслонки позволяет получить лин. зависимость между положением заслонки и давлением в камере исполнительного механизма 12. Подобные усилители обладают большой чувствительностью. Недостатки: большая инерционность и необходимость иметь спец. компрессорные установки.
38. Исполнительные механизмы (ИМ). Понятие и классификация: ИМ в системах управления обычно называют устройства, предназначенные для перемещения рабочего органа (РО), регулирующего в соответствии с силами поступающими от управляющего устройства. РО могут быть различного рода дроссельными заслонками, клапанами, задвижками и другими регулирующими безнапорными органами, способными производить изменения кол-ва энергии или рабочего в-ва, поступающего в объект управления. При этом перемещение РО может быть поступательным или вращательным в пределах 1 или нескольких оборотов. Конструкция и принцип действия ИМ зависят от: 1) хар-ра работы, который они должны выполнить; 2)рода используемой энергии. По виду воздействия на состояние системы автоматизации: 1)силовые; 2) параметрические. Силовые ИМ создают на своём выходе силу или момент, который однозначно определяет положение РО. Параметрические ИМ служат для изменения параметров, характеризующих данных РО. По виду потребляемой энергии: 1)пневматические; 2)гидравлические; 3)электрически(электродвигательные и электромагнитные).
39.Основыне хар-ки и показатели качества работы ИМ: ИМ в системах управления обычно называют устройства, предназначенные для перемещения рабочего органа (РО), регулирующего в соответствии с силами поступающими от управляющего устройства. Основными показателями качества и сравнительной оценки исполнительных механизмов является быстродействие и точность. Характер работы исполнительных механизмов зависит от: 1)номинальной нагрузки; 2)максимальной нагрузки; 3)коэффициента полезного действия; 4)зоны чувствительности. Конструкция и принцип действия ИМ зависят от: 1) хар-ра работы, который они должны выполнить; 2)рода используемой энергии.
40. Гидравлические исполнительные механизмы: Примен. в тех случаях, когда отсутствует источник электроэнергии или требуется увеличение усилия, воздействующего на рабочий орган и уменьшение инерционности системы автоматики. Преимущества: имеют простую конструкцию, непосредственно без промежуточных редукторов преобразования энергии потока жидкости или воздуха в механич. энергию возвратнопоступательного или вращательного движения. Недостатки: потребность в гидравлических источниках питания, необходимость обеспечения герметичности системы, сравнительно сложное выполнение дистанционного управления. Гидравлич. ИМ состоит из управляющего и исполнительного элемента. Обычно первое – золотник; 2 – гидроцилиндр. Гидроцилиндр реализует поступательное или вращательное движение выходного вала.
Выходная мощность |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 279; Нарушение авторского права страницы

 Е или R
Е или R  Вт,а потребление исполнительным элементом – несколько кВт. Усилители можно разделить: 1)электрические; 2)магнитные; 3)гидравлические; 4) пневматические. К основным хар-кам относятся: 1) коэффициент усиления
Вт,а потребление исполнительным элементом – несколько кВт. Усилители можно разделить: 1)электрические; 2)магнитные; 3)гидравлические; 4) пневматические. К основным хар-кам относятся: 1) коэффициент усиления  ; 2) мощность потребления; 3) быстродействие.
; 2) мощность потребления; 3) быстродействие.






 , Выходное давление – 0,1-10МПа. Входная величина – давление жидкости на поршень Р. Если есть золотник, то –перемещение. Выходная величина – перемещение выходного вала S.
, Выходное давление – 0,1-10МПа. Входная величина – давление жидкости на поршень Р. Если есть золотник, то –перемещение. Выходная величина – перемещение выходного вала S.