|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Схема автоматизации структурнаяСтр 1 из 3Следующая ⇒
Как 4. 7. Структура управления характеризуется многими качествами, которые трудно формализуются (полномочия работников, их ответственность, отношения между ними и т.п.) По этой причине при построении структуры Управления необходимо соблюдать соответствующих принципов Чем сложнее объект управления, тем более значительную роль в формировании его структуры играют принципы управления, которым она должна соответствовать. основные принципы построения структуры управления: Демократический принцип управления предполагает правильное соотношение централизации и децентрализации принятия решений, которые способствуют распределению стратегических и текущих задач Принцип системного подхода требует формирования совокупности управленческих решений, реализующих все цели функционирования предприятия Принцип управляемости предусматривает фиксированное соотношение количества руководителей и подчиненных Принцип соответствия субъекта и объекта управления предусматривает, что структура управления должна строиться, исходя из особенностей объекта управления Принцип адаптации заключается в том, что к построению структуры управления предъявляются требования гибкости, адаптивности, способности быстро реагировать на изменения внешней и внутренней среды Принцип специализации предусматривает обеспечение технологического разделения труда при формировании структурных подразделений Принцип централизации означает, что при проектировании структуры управления необходимо объединять управленческие работы с повторяя характером операций, однородностью приемов и методов выполнения Принцип правовой регламентации предусматривает проектирование структуры управления таким образом, чтобы обеспечить соблюдение всех решений и постановлений вышестоящих органов в части распределения обязанностей и ответственности Принцип построения структуры управления детализируется правилами ее создания: структура должна быть простой; схема структуры управления должна быть обзорной; каждый работник должен иметь должностную инструкцию; информационные каналы должны обеспечивать передачу информации, как в прямом, так и в обратном направлении; координацию всей деятельности организации осуществляет высшее руководство; стратегические решения принимает высшее руководство организации, учитывая свои возможности; необходимость избежания дублирования и двойной подчиненности; обязанности линейного и функционального руководства должны быть разграничены 8. Эксплуатацией средств и систем автоматизация называется обслуживание включенных и находящихся в работе автоматических устройств. Правильная организация эксплуатации установленных средств и систем автоматизации имеет исключительно важное значение для производства. Выход из строя отдельных приборов и систем автоматики, расположенных в цехах, лишает дежурный персонал возможности правильно вести технологический процесс, приводит к снижению производительности агрегатов, преждевременному износу оборудования, к различным неполадкам и даже авариям. Поэтому крайне важно обеспечить бесперебойную работу приборов и систем автоматизации, правильно организовав обслуживание работающих приборов, их своевременный качественный ремонт и проверку. Для обеспечения нормальной эксплуатации средств и систем автоматизации следует знать основные причины, вызывающие их нарушения: конструктивные недоработки некоторых типов средств автоматизации (применение средств автоматизации общепромышленного назначения, не приспособленных для работы в условиях данной отрасли промышленности; низкая ремонтопригодность - недопустимость осмотра, замены или ремонта отдельных блоков без их демонтажа; недостаточная герметичность блоков и аппаратов); некачественное изготовление средств автоматизация на заводах; некачественный монтаж систем автоматизации; низкий уровень эксплуатации; несоблюдение порядка, объема и методов профилактических и ремонтных работ; неравноценная замена заводских деталей средств автоматизации деталями собственного изготовления; применение нестандартных предохранителей; отключение средств автоматизации на продолжительное время при мелких неисправностях; неточная установка напряжения питания; нарушение правил включения и отключения; переключение цепей под током; произвольная регулировка средств автоматизации; естественный износ, старение, окисление и другие изменения в средствах автоматизации. Монтаж системы на объекте При установке новой (или модернизации существующей) системы автоматизации возникает задача механического, электрического и пневматического демонтажа старых и монтажа новых щитов и пультов управления, датчиков и исполнительных механизмов на технологическом оборудовании. Монтаж системы автоматизации предполагает приобретение и изготовление вспомогательного оборудования и материалов: отборных устройств для датчиков, соединительных фланцев, болтов, защитных трубок, лотков и коробов, клемных коробок, кабельно-проводниковой продукции, пневмотрубок, соединителей и др. 9. Динамическая система представляет собой математическую модель некоторого объекта, процесса или явления. Динамическая система также может быть представлена как система, обладающая состоянием. При таком подходе, динамическая система описывает (в целом) динамику некоторого процесса, а именно: процесс перехода системы из одного состояния в другое. Фазовое пространство системы — совокупность всех допустимых состояний динамической системы. Таким образом, динамическая система характеризуется своим начальным состоянием и законом, по которому система переходит из начального состояния в другое. Различают системы с дискретным временем и системы с непрерывным временем. В системах с дискретным временем, которые традиционно называются каскадами, поведение системы (или, что то же самое, траектория системы в фазовом пространстве) описывается последовательностью состояний. В системах с непрерывным временем, которые традиционно называются потоками, состояние системы определено для каждого момента времени на вещественной или комплексной оси. Каскады и потоки являются основным предметом рассмотрения в символической и топологической динамике. Динамическая система (как с дискретным, так и с непрерывным временем) часто описывается автономной системой дифференциальных уравнений, заданной в некоторой области и удовлетворяющей там условиям теоремы существования и единственности решения дифференциального уравнения. Положениям равновесия динамической системы соответствуют особые точки дифференциального уравнения, а замкнутые фазовые кривые — его периодическим решениям. Основное содержание теории динамических систем — это исследование кривых, определяемых дифференциальными уравнениями. Сюда входит разбиение фазового пространства на траектории и исследование предельного поведения этих траекторий: поиск и классификация положений равновесия, выделение притягивающих (аттракторы) и отталкивающих (репеллеры) множеств (многообразий). Способы задания динамических систем Для задания динамической системы необходимо описать её фазовое пространство X, множество моментов времени T и некоторое правило, описывающее движение точек фазового пространства со временем. Множество моментов времени T может быть как интервалом вещественной прямой (тогда говорят, что время непрерывно), так и множеством целых или натуральных чисел (дискретное время). Во втором случае «движение» точки фазового пространства больше напоминает мгновенные «скачки» из одной точки в другую: траектория такой системы является не гладкой кривой, а просто множеством точек, и называется обычно орбитой. Тем не менее, несмотря на внешнее различие, между системами с непрерывным и дискретным временем имеется тесная связь: многие свойства являются общими для этих классов систем или легко переносятся с одного на другой. 10.------------------------------------- 11. Автоматизация производства – это процесс в развитии машинного производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам[1]. Введение автоматизации на производстве позволяет значительно повысить производительность труда и качество выпускаемой продукции, сократить долю рабочих, занятых в различных сферах производства. До внедрения средств автоматизации замещение физического труда происходило посредством механизации основных и вспомогательных операций производственного процесса. Интеллектуальный труд долгое время оставался не механизированным (ручным). В настоящее время операции физического и интеллектуального труда, поддающиеся формализации, становятся объектом механизации и автоматизации. 12. Структурная схема — это совокупность элементарных звеньев объекта и связей между ними, один из видов графической модели. Под элементарным звеном понимают часть объекта, системы управления и т. д., которая реализует элементарную функцию. Рассмотрим, как получить структурную схему, соответствующую векторно-матричному описанию объекта типа:
Проинтегрируем уравнение состояния и определим x ( t )
Типовые звенья: Функциональное назначение элементов системы не зависит от физической природы регулируемой величины, ни от физической природы аппаратуры, из которой построена система регулирования. Величина y(t) может быть напряжением, положением осей в следящем приводе или температурой в электропечи. системы можно разбить по характеру процессов протекающих в них на: - пропорциональное (усилительное) звено; - интегрирующее звено; - инерционное (апериодическое) звено первого порядка; - инерционное звено второго порядка (колебательное звено); - дифференцирующее звено; - запаздывающее звено; - интегральное звено с отсечкой. Законы регулирования В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т. е. U = f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора, а также устанавливает основные качественные и количественные характеристики систем. Различают линейные и нелинейные законы регулирования. Кроме того, эти законы могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микроЭВМ или микропроцессорных систем). Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон, и регулятор в этом случае называют П-регулятором. При этом , где – постоянная величина, k – коэффициент пропорциональности. Основным достоинством П-регулятора является простота. По существу, это есть усилитель постоянного тока с коэффициентом усиления k. Недостатки П-регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами. 13. Сигналы, действующие в системах автоматического управления, бывают непрерывными и дискретными. Соответственно этому САУ делятся на системы непрерывного и дискретного действия. В свою очередь дискретные САУ делятся на релейные, импульсные и цифровые. Релейные САУ - это системы с квантованием по уровню, импульсные - с квантованием по времени, а цифровые - с применением обоих видов квантования. В дискретных системах осуществляется преобразование информации, заданной в виде дискретных процессов, квантованных по времени или по времени и уровню одновременно. Введем специальные обозначения для этих процессов. Исходные непрерывные процессы, из которых получаются дискретные, называются огибающими и обозначаются обычными символами, например x(t). Чтобы получить дискретный процесс, квантованный по времени, по заданной огибающей достаточно в функции x(t) положить значение t = iTn, то есть x(iTn) = x(t = iTn). Дискретный процесс, квантованный по времени с постоянным периодом Tn и по уровню с постоянным шагом Δ, будем обозначать символом х(iTn) (рис. 1.2, б). Получить его по заданной функции огибающей можно по формуле
где F обозначает операцию нахождения ближайшего к значению х(iТn) числа с шагом квантования по уровню Δ. Операция F является нелинейной, поэтому цифровые системы с квантованием процессов по времени и уровню относятся к классу нелинейных. Их особенности мы будем рассматривать отдельно в дальнейшем, а сейчас остановимся на линейных дискретных системах с процессами х(iТn), квантованными по времени.
Работа дискретной системы сводится к преобразованию входных процессов x(iTn) в выходные у(iТn) с некоторыми заданными условиями. 14. ГАП (гибкое автоматизированное производство) — современная форма производства, обеспечивающее максимальную степень гибкости переналадки в отличие от остальных существующих типов. Гибкость ГАП обусловлена применением специальных станков — обрабатывающих центров (ОЦ), объединённых в гибкие производственные участки (ГПУ) системами обеспечения работоспособности. Системы условно можно разделить на технические и информационные. Гибкие производственные системы (ГПС) — наиболее эффективное средство автоматизации серийного производства, позволяющее переходить с одного вида продукции на другой с минимальными затратами времени и труда. ГПС позволяет снизить потребность в квалифицированных станочниках и станках, повысить качество продукции. Производительность станков с ЧПУ, входящих в ГПС, в 1,5—2 раза выше суммарной производительности такого же количества индивидуально работающих станков с ЧПУ. Гибкая производственная система — это комплекс технологических средств, состоящих из одного-двух (не более) многоцелевых станков с ЧПУ или других металлорежущих станков с ЧПУ, оснащенных механизмами автоматической смены инструмента, автоматической смены заготовок и транспортирования их со склада до зоны обработки с помощью различных транспортных средств, например самоходных роботизированных тележек. Этот комплекс связан с единым математическим обеспечением, способствующим работе оборудования в автоматическом режиме с минимальным участием человека. 15. регулирования технологических параметров (температура, давление, линейная скорость, угловая скорость и др.). Техническим результатом является повышение эффективности автоматического регулирования технологических параметров за счет учета изменения свойств объекта управления и внешних возмущающих воздействий. Способ включают этапы, на которых формируют управляющее воздействие и измеряют регулируемую величину объекта, причем одновременно с формированием на объект управления одиночного управляющего импульса максимальной мощности постоянно вычисляют величину инерционного роста регулируемого параметра, которую используют при определении момента завершения одиночного управляющего воздействия, обеспечивающего точное достижение регулируемой величиной заданного значения за минимальное время без перерегулирования, а точное поддержание заданного значения регулируемой величины осуществляют формированием соответствующей этому заданному значению вычисленной мощности управляющего воздействия, а также постоянной коррекцией мощности управляющего воздействия, учитывающей текущую ошибку регулирования и скорость изменения регулируемой величины, и постоянным учетом свойств объекта управления во время работы. 16. Анализируя аналитический и экспериментальный методы получения динамических характеристик, можно утверждать, что каждый из них имеет свои положительные и отрицательные качества. Очевидно, что соответствие аналитической модели целому классу объектов моделирования, отображение взаимосвязей между внутренними параметрами объекта в этой модели, а также соответствие структуры модели структуре объекта, является довольно весомым преимуществом аналитического моделирования. 17.--------------------------------------------------- 18. На основании эскизного проекта и разработанной функциональной схемы автоматизации производится выбор технических средств для проектируемой системы управления процессом. Правильный выбор технических средств автоматизации является непременным условием эффективного и надёжного функционирования системы, залогом её минимальной стоимости и безопасности для персонала и окружающей среды. Современные средства автоматизации делятся на две группы: коммутированные и некомментированные (программированные) технические средства автоматизации: 1) Коммутированные средства автоматизации 2) Программированные средства автоматизации ADSP процессоры – средство автоматизации, которое используются для сложного математического анализа процессов в системе. ПЛК – самые распространенные средства автоматизации. Имеют собственный блок питания, центральный процессор, оперативную память, сетевую карту, модули ввода/вывода. ПКК – компьютер с платами ввода/вывода, сетевыми картами, которые служат для ввода/вывода информации. ПАК (программированные автоматизированные контроллеры) – ПЛК+ПКК. Имеют распределенную сетевую структуру для обработки данных. Специализированные контроллеры – не являются свободно программируемыми средствами автоматизации, а используют стандартные программы, в которых можно изменить только некоторые коэффициенты. 19. Качество процесса принятия решения находится в корреляционной зависимости от полноты учета всех факторов, существенных для последствий от принятых решений. основными категориями теории принятия решения могут быть выбраны следующие множества: Система управления (СУ); Объект управления (О); Орган управления и принятия решения (У); Среда функционирования (С); Состояние объекта (θ); Процесс принятия решения (алгоритм) (А); Оценочный функционал решения (F); Ситуация принятия решения (S); Информационная ситуация (I); Источник информации (J); Критерий принятия решения (К). 20.-------------------------------------------------- 21. формула Коши: где
22. Виды схем автоматизации: Блок-схема Блок-схема САР, состоит из функциональных блоков, которые представляют собой конструктивно обособленные части (элементы или устройства) автоматических систем, которые выполняют определенные функции. Функциональные блоки на схеме обозначают прямоугольниками, внутри которых надписывают их наименования в соответствии с функциями, которые выполняются. Блок-схема Блок-схема САР, состоит из функциональных блоков, которые представляют собой конструктивно обособленные части (элементы или устройства) автоматических систем, которые выполняют определенные функции. Функциональные блоки на схеме обозначают прямоугольниками, внутри которых надписывают их наименования в соответствии с функциями, которые выполняются. Как 13. 28. Исполнительное устройство — устройство системы автоматического управления или регулирования, воздействующее на процесс в соответствии с получаемой командной информацией.
Пневматические устройства в системах автоматики выполняют следующие функции: - получение информации о состоянии системы с помощью входных элементов (датчиков); - обработка информации с помощью логико-вычислительных элементов (процессоров); - управление исполнительными устройствами с помощью распределительных элементов (усилителей мощности); - совершение полезной работы с помощью исполнительных устройств (двигателей). 29. В состав микропроцессора входят следующие устройства. 1. Арифметико-логическое устройство предназначено для выполнения всех арифметических и логических операций над числовой и символьной информацией. 2. Устройство управления координирует взаимодействие различных частей компьютера. Выполняет следующие основные функции: o формирует и подает во все блоки машины в нужные моменты времени определенные сигналы управления (управляющие импульсы), обусловленные спецификой выполнения различных операций; o формирует адреса ячеек памяти, используемых выполняемой операцией, и передает эти адреса в соответствующие блоки компьютера; o получает от генератора тактовых импульсов обратную последовательность импульсов.
Структурная схема микропроцессорной системы. 30. Аппараты периодического действия вследствие низкой производительности применяются лишь в малотоннажных производствах и представляют собой обычно аппараты ( реакторы) без перемешивающих устройств, снабженные обогревом, и аппараты с мешалками. В промышленной практике все большее распространение получают непрерывно действующие аппараты. Если эти аппараты автоматизировать то можно в них регулировать: температуру, частоту вращения лопастей, продолжительность перемешивания, давление и т.д. 31 В наиболее общем случае АСУ ТП представляет собой замкнутую систему, обеспечивающую автоматизированный сбор и обработку информации, необходимой для оптимизации управления технологическим объектом в соответствии с принятым критерием, и реализацию управляющих воздействий на технологический объект. Структура системы автоматизации условно состоит из трёх уровней интеграции: первый уровень — уровень датчиков и исполнительных механизмов, второй уровень управления — уровень контроллеров, которые выполняют функции сбора информации и непосредственного управления технологическими объектами, третий (верхний уровень) — система диспетчерского учета и управления — обеспечивает координацию работы уровня программируемых логических контроллеров и все операции по работе с архивом данных. К управляющим функциям АСУ ТП относят регулирование (стабилизация) отдельных технологических переменных, логическое управление аппаратами (исполнительными механизмами), программно-логическое управление группой оборудования, оптимальное управление установившимися или переходными режимами или отдельными стадиями процесса, адаптивное управление объектом в целом, например управление участком станков с ЧПУ. 32. МИКРОПРОЦЕССОРНАЯ ТЕХНИКА — вид вычислительной техники, находящей все более широкое применение в различных средствах автоматизации и связи, и прежде всего в ЭВМ. Микропроцессорная техника предназначена для логической и арифметической обработки информации на основе принципа программного управления. Микропроцессоры, основанные на больших интегральных схемах, включают в себя программный счетчик, предназначенный для хранения адреса команды, подлежащей выполнению; регистр команды, который принимает выбранную из памяти программ команду и хранит ее в течение цикла выполнения команды; указатель последней занятой ячейки памяти; регистры общего назначения, представляющие собой сверхоперативную память микропроцессора; аккумулятор, который является источником и приемником информации; арифметико-логическое устройство, предназначенное для обработки данных; регистр, на котором формируются признаки результатов операций. Возможности ЭВМ во многом зависят от микропроцессоров, от уровня больших интегральных схем. Сам по себе МП еще не способен реализовать переработку информации, т. е. он не может решить ту или иную конкретную задачу. Чтобы решить задачу, его нужно соединить с некоторыми другими устройствами, запрограммировать и обеспечить обмен информацией МП с этими устройствами. В число подсоединяемых устройств входят, как минимум, запоминающие устройства (ЗУ) и устройства ввода-вывода (УВВ). Таким образом, МП — это стандартное (поскольку это БИС), универсальное (поскольку оно программируемое) устройство, позволяющее реализовать прием, обработку и передачу цифровой информации. Микропроцессорная система (МПС) — это совокупность взаимосвязанных устройств, включающая один или несколько МП, память (ЗУ), устройства ввода-вывода и ряд других устройств, нацеленных на выполнение некоторых четко определенных функций. В общем случае у МПС может отсутствовать внутреннее (системное) программное обеспечение, в особенности в тех случаях, когда МПС используются для реализации непосредственного цифрового управления (регулирования), т. е. в системах, работающих в реальном масштабе времени (в темпе с процессом). Таким образом, основным способом применения МП является создание на его основе и других ИС и устройств МПС. Как 4. 7. Структура управления характеризуется многими качествами, которые трудно формализуются (полномочия работников, их ответственность, отношения между ними и т.п.) По этой причине при построении структуры Управления необходимо соблюдать соответствующих принципов Чем сложнее объект управления, тем более значительную роль в формировании его структуры играют принципы управления, которым она должна соответствовать. основные принципы построения структуры управления: Демократический принцип управления предполагает правильное соотношение централизации и децентрализации принятия решений, которые способствуют распределению стратегических и текущих задач Принцип системного подхода требует формирования совокупности управленческих решений, реализующих все цели функционирования предприятия Принцип управляемости предусматривает фиксированное соотношение количества руководителей и подчиненных Принцип соответствия субъекта и объекта управления предусматривает, что структура управления должна строиться, исходя из особенностей объекта управления Принцип адаптации заключается в том, что к построению структуры управления предъявляются требования гибкости, адаптивности, способности быстро реагировать на изменения внешней и внутренней среды Принцип специализации предусматривает обеспечение технологического разделения труда при формировании структурных подразделений Принцип централизации означает, что при проектировании структуры управления необходимо объединять управленческие работы с повторяя характером операций, однородностью приемов и методов выполнения Принцип правовой регламентации предусматривает проектирование структуры управления таким образом, чтобы обеспечить соблюдение всех решений и постановлений вышестоящих органов в части распределения обязанностей и ответственности Принцип построения структуры управления детализируется правилами ее создания: структура должна быть простой; схема структуры управления должна быть обзорной; каждый работник должен иметь должностную инструкцию; информационные каналы должны обеспечивать передачу информации, как в прямом, так и в обратном направлении; координацию всей деятельности организации осуществляет высшее руководство; стратегические решения принимает высшее руководство организации, учитывая свои возможности; необходимость избежания дублирования и двойной подчиненности; обязанности линейного и функционального руководства должны быть разграничены 8. Эксплуатацией средств и систем автоматизация называется обслуживание включенных и находящихся в работе автоматических устройств. Правильная организация эксплуатации установленных средств и систем автоматизации имеет исключительно важное значение для производства. Выход из строя отдельных приборов и систем автоматики, расположенных в цехах, лишает дежурный персонал возможности правильно вести технологический процесс, приводит к снижению производительности агрегатов, преждевременному износу оборудования, к различным неполадкам и даже авариям. Поэтому крайне важно обеспечить бесперебойную работу приборов и систем автоматизации, правильно организовав обслуживание работающих приборов, их своевременный качественный ремонт и проверку. Для обеспечения нормальной эксплуатации средств и систем автоматизации следует знать основные причины, вызывающие их нарушения: конструктивные недоработки некоторых типов средств автоматизации (применение средств автоматизации общепромышленного назначения, не приспособленных для работы в условиях данной отрасли промышленности; низкая ремонтопригодность - недопустимость осмотра, замены или ремонта отдельных блоков без их демонтажа; недостаточная герметичность блоков и аппаратов); некачественное изготовление средств автоматизация на заводах; некачественный монтаж систем автоматизации; низкий уровень эксплуатации; несоблюдение порядка, объема и методов профилактических и ремонтных работ; неравноценная замена заводских деталей средств автоматизации деталями собственного изготовления; применение нестандартных предохранителей; отключение средств автоматизации на продолжительное время при мелких неисправностях; неточная установка напряжения питания; нарушение правил включения и отключения; переключение цепей под током; произвольная регулировка средств автоматизации; естественный износ, старение, окисление и другие изменения в средствах автоматизации. Монтаж системы на объекте При установке новой (или модернизации существующей) системы автоматизации возникает задача механического, электрического и пневматического демонтажа старых и монтажа новых щитов и пультов управления, датчиков и исполнительных механизмов на технологическом оборудовании. Монтаж системы автоматизации предполагает приобретение и изготовление вспомогательного оборудования и материалов: отборных устройств для датчиков, соединительных фланцев, болтов, защитных трубок, лотков и коробов, клемных коробок, кабельно-проводниковой продукции, пневмотрубок, соединителей и др. 9. Динамическая система представляет собой математическую модель некоторого объекта, процесса или явления. Динамическая система также может быть представлена как система, обладающая состоянием. При таком подходе, динамическая система описывает (в целом) динамику некоторого процесса, а именно: процесс перехода системы из одного состояния в другое. Фазовое пространство системы — совокупность всех допустимых состояний динамической системы. Таким образом, динамическая система характеризуется своим начальным состоянием и законом, по которому система переходит из начального состояния в другое. Различают системы с дискретным временем и системы с непрерывным временем. В системах с дискретным временем, которые традиционно называются каскадами, поведение системы (или, что то же самое, траектория системы в фазовом пространстве) описывается последовательностью состояний. В системах с непрерывным временем, которые традиционно называются потоками, состояние системы определено для каждого момента времени на вещественной или комплексной оси. Каскады и потоки являются основным предметом рассмотрения в символической и топологической динамике. Динамическая система (как с дискретным, так и с непрерывным временем) часто описывается автономной системой дифференциальных уравнений, заданной в некоторой области и удовлетворяющей там условиям теоремы существования и единственности решения дифференциального уравнения. Положениям равновесия динамической системы соответствуют особые точки дифференциального уравнения, а замкнутые фазовые кривые — его периодическим решениям. Основное содержание теории динамических систем — это исследование кривых, определяемых дифференциальными уравнениями. Сюда входит разбиение фазового пространства на траектории и исследование предельного поведения этих траекторий: поиск и классификация положений равновесия, выделение притягивающих (аттракторы) и отталкивающих (репеллеры) множеств (многообразий). Способы задания динамических систем Для задания динамической системы необходимо описать её фазовое пространство X, множество моментов времени T и некоторое правило, описывающее движение точек фазового пространства со временем. Множество моментов времени T может быть как интервалом вещественной прямой (тогда говорят, что время непрерывно), так и множеством целых или натуральных чисел (дискретное время). Во втором случае «движение» точки фазового пространства больше напоминает мгновенные «скачки» из одной точки в другую: траектория такой системы является не гладкой кривой, а просто множеством точек, и называется обычно орбитой. Тем не менее, несмотря на внешнее различие, между системами с непрерывным и дискретным временем имеется тесная связь: многие свойства являются общими для этих классов систем или легко переносятся с одного на другой. 10.------------------------------------- 11. Автоматизация производства – это процесс в развитии машинного производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам[1]. Введение автоматизации на производстве позволяет значительно повысить производительность труда и качество выпускаемой продукции, сократить долю рабочих, занятых в различных сферах производства. До внедрения средств автоматизации замещение физического труда происходило посредством механизации основных и вспомогательных операций производственного процесса. Интеллектуальный труд долгое время оставался не механизированным (ручным). В настоящее время операции физического и интеллектуального труда, поддающиеся формализации, становятся объектом механизации и автоматизации. 12. Структурная схема — это совокупность элементарных звеньев объекта и связей между ними, один из видов графической модели. Под элементарным звеном понимают часть объекта, системы управления и т. д., которая реализует элементарную функцию. Рассмотрим, как получить структурную схему, соответствующую векторно-матричному описанию объекта типа:
Проинтегрируем уравнение состояния и определим x ( t )
Типовые звенья: Функциональное назначение элементов системы не зависит от физической природы регулируемой величины, ни от физической природы аппаратуры, из которой построена система регулирования. Величина y(t) может быть напряжением, положением осей в следящем приводе или температурой в электропечи. системы можно разбить по характеру процессов протекающих в них на: - пропорциональное (усилительное) звено; - интегрирующее звено; - инерционное (апериодическое) звено первого порядка; - инерционное звено второго порядка (колебательное звено); - дифференцирующее звено; - запаздывающее звено; - интегральное звено с отсечкой. Законы регулирования В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т. е. U = f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора, а также устанавливает основные качественные и количественные характеристики систем. Различают линейные и нелинейные законы регулирования. Кроме того, эти законы могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микроЭВМ или микропроцессорных систем). Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон, и регулятор в этом случае называют П-регулятором. При этом , где – постоянная величина, k – коэффициент пропорциональности. Основным достоинством П-регулятора является простота. По существу, это есть усилитель постоянного тока с коэффициентом усиления k. Недостатки П-регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами. 13. Сигналы, действующие в системах автоматического управления, бывают непрерывными и дискретными. Соответственно этому САУ делятся на системы непрерывного и дискретного действия. В свою очередь дискретные САУ делятся на релейные, импульсные и цифровые. Релейные САУ - это системы с квантованием по уровню, импульсные - с квантованием по времени, а цифровые - с применением обоих видов квантования. В дискретных системах осуществляется преобразование информации, заданной в виде дискретных процессов, квантованных по времени или по времени и уровню одновременно. Введем специальные обозначения для этих процессов. Исходные непрерывные процессы, из которых получаются дискретные, называются огибающими и обозначаются обычными символами, например x(t). Чтобы получить дискретный процесс, квантованный по времени, по заданной огибающей достаточно в функции x(t) положить значение t = iTn, то есть x(iTn) = x(t = iTn). Дискретный процесс, квантованный по времени с постоянным периодом Tn и по уровню с постоянным шагом Δ, будем обозначать символом х(iTn) (рис. 1.2, б). Получить его по заданной функции огибающей можно по формуле
где F обозначает операцию нахождения ближайшего к значению х(iТn) числа с шагом квантования по уровню Δ. Операция F является нелинейной, поэтому цифровые системы с квантованием процессов по времени и уровню относятся к классу нелинейных. Их особенности мы будем рассматривать отдельно в дальнейшем, а сейчас остановимся на линейных дискретных системах с процессами х(iТn), квантованными по времени.
Работа дискретной системы сводится к преобразованию входных процессов x(iTn) в выходные у(iТn) с некоторыми заданными условиями. 14. ГАП (гибкое автоматизированное производство) — современная форма производства, обеспечивающее максимальную степень гибкости переналадки в отличие от остальных существующих типов. Гибкость ГАП обусловлена применением специальных станков — обрабатывающих центров (ОЦ), объединённых в гибкие производственные участки (ГПУ) системами обеспечения работоспособности. Системы условно можно разделить на технические и информационные. Гибкие производственные системы (ГПС) — наиболее эффективное средство автоматизации серийного производства, позволяющее переходить с одного вида продукции на другой с минимальными затратами времени и труда. ГПС позволяет снизить потребность в квалифицированных станочниках и станках, повысить качество продукции. Производительность станков с ЧПУ, входящих в ГПС, в 1,5—2 раза выше суммарной производительности такого же количества индивидуально работающих станков с ЧПУ. Гибкая производственная система — это комплекс технологических средств, состоящих из одного-двух (не более) многоцелевых станков с ЧПУ или других металлорежущих станков с ЧПУ, оснащенных механизмами автоматической смены инструмента, автоматической смены заготовок и транспортирования их со склада до зоны обработки с помощью различных транспортных средств, например самоходных роботизированных тележек. Этот комплекс связан с единым математическим обеспечением, способствующим работе оборудования в автоматическом режиме с минимальным участием человека. 15. регулирования технологических параметров (температура, давление, линейная скорость, угловая скорость и др.). Техническим результатом является повышение эффективности автоматического регулирования технологических параметров за счет учета изменения свойств объекта управления и внешних возмущающих воздействий. Способ включают этапы, на которых формируют управляющее воздействие и измеряют регулируемую величину объекта, причем одновременно с формированием на объект управления одиночного управляющего импульса максимальной мощности постоянно вычисляют величину инерционного роста регулируемого параметра, которую используют при определении момента завершения одиночного управляющего воздействия, обеспечивающего точное достижение регулируемой величиной заданного значения за минимальное время без перерегулирования, а точное поддержание заданного значения регулируемой величины осуществляют формированием соответствующей этому заданному значению вычисленной мощности управляющего воздействия, а также постоянной коррекцией мощности управляющего воздействия, учитывающей текущую ошибку регулирования и скорость изменения регулируемой величины, и постоянным учетом свойств объекта управления во время работы. 16. Анализируя аналитический и экспериментальный методы получения динамических характеристик, можно утверждать, что каждый из них имеет свои положительные и отрицательные качества. Очевидно, что соответствие аналитической модели целому классу объектов моделирования, отображение взаимосвязей между внутренними параметрами объекта в этой модели, а также соответствие структуры модели структуре объекта, является довольно весомым преимуществом аналитического моделирования. 17.--------------------------------------------------- 18. На основании эскизного проекта и разработанной функциональной схемы автоматизации производится выбор технических средств для проектируемой системы управления процессом. Правильный выбор технических средств автоматизации является непременным условием эффективного и надёжного функционирования системы, залогом её минимальной стоимости и безопасности для персонала и окружающей среды. Современные средства автоматизации делятся на две группы: коммутированные и некомментированные (программированные) технические средства автоматизации: 1) Коммутированные средства автоматизации 2) Программированные средства автоматизации ADSP процессоры – средство автоматизации, которое используются для сложного математического анализа процессов в системе. ПЛК – самые распространенные средства автоматизации. Имеют собственный блок питания, центральный процессор, оперативную память, сетевую карту, модули ввода/вывода. ПКК – компьютер с платами ввода/вывода, сетевыми картами, которые служат для ввода/вывода информации. ПАК (программированные автоматизированные контроллеры) – ПЛК+ПКК. Имеют распределенную сетевую структуру для обработки данных. Специализированные контроллеры – не являются свободно программируемыми средствами автоматизации, а используют стандартные программы, в которых можно изменить только некоторые коэффициенты. 19. Качество процесса принятия решения находится в корреляционной зависимости от полноты учета всех факторов, существенных для последствий от принятых решений. основными категориями теории принятия решения могут быть выбраны следующие множества: Система управления (СУ); Объект управления (О); Орган управления и принятия решения (У); Среда функционирования (С); Состояние объекта (θ); Процесс принятия решения (алгоритм) (А); Оценочный функционал решения (F); Ситуация принятия решения (S); Информационная ситуация (I); Источник информации (J); Критерий принятия решения (К). 20.-------------------------------------------------- 21. формула Коши: где
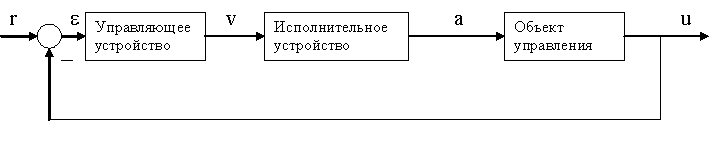
22. Виды схем автоматизации: Схема автоматизации структурная Структурная схема предназначена для отображения системы контроля и управления производственными процессами данного объекта и устанавливает связи между щитами, пунктами управления, оперативным рабочими постами основных групп технологического оборудования и показывает административно-техническую суть централизованного управления объектом. Блок-схема Блок-схема САР, состоит из функциональных блоков, которые представляют собой конструктивно обособленные части (элементы или устройства) автоматических систем, которые выполняют определенные функции. Функциональные блоки на схеме обозначают прямоугольниками, внутри которых надписывают их наименования в соответствии с функциями, которые выполняются. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 280; Нарушение авторского права страницы



 - коэффициенты модели, выраженные в общей (символьной) форме.
- коэффициенты модели, выраженные в общей (символьной) форме.
 - любая точка внутри контура
- любая точка внутри контура  .
.