
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет и выбор силовых элементов ЭПСтр 1 из 2Следующая ⇒
Расчет и выбор силовых элементов ЭП Выбор электродвигателя
Выбор двигателя ориентировочно выбирается по мощности:
РН ³ kз МС.М.МАКС wМ.МАКС
где kз = 3 – коэффициент, учитывающий требования к динамическим характеристикам ЭП (меньшему времени переходного процесса соответствует большее значение коэффициента). МС.М.МАКС = 600 НМ - момент статического сопротивления механизма. wМ.МАКС = 25 с-1 - максимальная угловая скорость механизма.
Рн= 600*25*3 = 45000= 45кВт
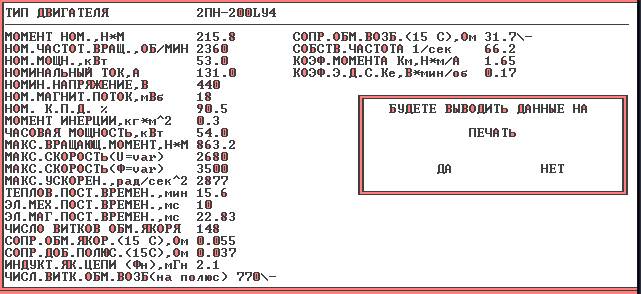
Принимаем двигатель серии 2ПН-200LУ4
Передаточное число редуктора jP=ω н/ω м.мах
где ω н =0, 1045*nн=0, 1045*2360=247 с-1 - номинальная угловая скорость двигателя. jP= 247/25 = 9, 88
Максимальное ускорение вала двигателя: ε max = ε м.макс*jp где e М.МАКС =4 с-2 - максимальное угловое ускорение механизма. ε max = 4*9, 88 = 39, 52 c-2
Суммарный момент инерции двигателя с редуктором: J1=Jд+JР=Jд+0, 1* Jд
где JД = 0, 017 - соответственно моменты инерции двигателя.
J1=0, 3+0, 1*0, 3=0, 33 кг*м2
Суммарный момент инерции электропривода:
J = γ *J1
где g = 5 - коэффициент соотношения масс.
J = 5*0, 33 = 1, 65 кг*м2
Приведенный к валу двигателя момент сопротивления нагрузки:
Мс=Мс.м.макс/(η Р*jP)
где η Р = 0, 93 – КПД редуктора.
Мс =600/(0, 93*9, 88)=65, 3 Н*м
Номинальный момент двигателя Мн =Pн/ω н=53000/247=214, 6 Н*м. Для проверки выбранного двигателя определяют эквивалентный момент:
Мэ < Мн
Эквивалентный момент не превышает номинальный момент двигателя. Следовательно, двигатель выбран верно. Затем надо определить сопротивление Rяд якорной цепи выбранного двигателя при 75 °С, а также его номинальный ток якоря IЯН, если они не указаны в паспортных данных:
Rяд = 1, 3 (гя+ гдп)=1, 3*(0, 055+0, 037)=0, 1196 Ом
Из паспортных данных имеем:
· номинальный ток якоря:
· Индуктивности якорной цепи: Выбор сглаживающего дросселя
Далее по условию обеспечения допустимых пульсаций выпрямленного тока следует проверить, требуется ли сглаживающий дроссель. Необходимая индуктивность якорной цепи: Lяц= где еп = 0, 2 — относительная величина эффективного значения первой гармоники выпрямленного напряжения; она зависит от максимального угла отпирания тиристоров. iЕ = 4 % - относительная величина эффективного значения первой гармоники выпрямленного тока. Еd0 = kU UТОР.Ф — максимальная ЭДС преобразователя. где ku = 2, 34 и UТОР.Ф = 220 В.
Так как Lяц ≥ Lя.д+ Lт.п (10 ≥ 2, 1+0, 5), условие не выполняется, нужен сглаживающий дроссель. Сглаживающий дроссель выбирается согласно условиям: LДР ³ LЯ.Ц. – (LЯ.Д. + LТ.П.) LДР ³ 7, 4 мГн IДР.Н. ³ I Я.H. IДР.Н. ³ 131 А
Установим два сглаживающих дросселя последовательно общей индуктивностью 13 мГн. Активное сопротивление сглаживающего дросселя можно определить по формуле: RДР = RДР = . Здесь IДР.Н – номинальный ток выбранного дросселя.
Синтез системы управления Список рекомендуемой литературы 1. Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода. – М.: Энергия, 1979. 2. Шипило В.И. Автоматизированный вентильный электропривод. – М.: Энергия, 1969. 3. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1982. 4. Гарнов В.К., Рабинович В.Б., Вишневецкий В.М. Унифицированные системы автоуправления электроприводами в металлургии.- М.: Металлургия, 1977.
Расчет и выбор силовых элементов ЭП Выбор электродвигателя
Выбор двигателя ориентировочно выбирается по мощности:
РН ³ kз МС.М.МАКС wМ.МАКС
где kз = 3 – коэффициент, учитывающий требования к динамическим характеристикам ЭП (меньшему времени переходного процесса соответствует большее значение коэффициента). МС.М.МАКС = 600 НМ - момент статического сопротивления механизма. wМ.МАКС = 25 с-1 - максимальная угловая скорость механизма.
Рн= 600*25*3 = 45000= 45кВт
Принимаем двигатель серии 2ПН-200LУ4
Передаточное число редуктора jP=ω н/ω м.мах
где ω н =0, 1045*nн=0, 1045*2360=247 с-1 - номинальная угловая скорость двигателя. jP= 247/25 = 9, 88
Максимальное ускорение вала двигателя: ε max = ε м.макс*jp где e М.МАКС =4 с-2 - максимальное угловое ускорение механизма. ε max = 4*9, 88 = 39, 52 c-2
Суммарный момент инерции двигателя с редуктором: J1=Jд+JР=Jд+0, 1* Jд
где JД = 0, 017 - соответственно моменты инерции двигателя.
J1=0, 3+0, 1*0, 3=0, 33 кг*м2
Суммарный момент инерции электропривода:
J = γ *J1
где g = 5 - коэффициент соотношения масс.
J = 5*0, 33 = 1, 65 кг*м2
Приведенный к валу двигателя момент сопротивления нагрузки:
Мс=Мс.м.макс/(η Р*jP)
где η Р = 0, 93 – КПД редуктора.
Мс =600/(0, 93*9, 88)=65, 3 Н*м
Номинальный момент двигателя Мн =Pн/ω н=53000/247=214, 6 Н*м. Для проверки выбранного двигателя определяют эквивалентный момент:
Мэ < Мн
Эквивалентный момент не превышает номинальный момент двигателя. Следовательно, двигатель выбран верно. Затем надо определить сопротивление Rяд якорной цепи выбранного двигателя при 75 °С, а также его номинальный ток якоря IЯН, если они не указаны в паспортных данных:
Rяд = 1, 3 (гя+ гдп)=1, 3*(0, 055+0, 037)=0, 1196 Ом
Из паспортных данных имеем:
· номинальный ток якоря:
· Индуктивности якорной цепи: |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 217; Нарушение авторского права страницы





 Ом
Ом