
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Связи и реакции связей. Аксиома связей.
По определению, тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещения данного тела в пространстве, будем называть связью. Например, тело лежащее на столе – несвободное тело. Связью его является плоскость стола, которая препятствует перемещению тела вниз. Очень важен так называемый принцип освобождаемости, которым будем пользоваться в дальнейшем. Записывается он так. Любое несвободное тело можно сделать свободным, если связи убрать, а действие их на тело заменить силами, такими, чтобы тело оставалось в равновесии. Сила, с которой данная связь действует на тело, препятствуя тем ила иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи. Так у тела, лежащего на столе, связь – стол. Тело несвободное. Сделаем его свободным – стол уберем, а чтобы тело осталось в равновесии, заменим стол силой, направленной вверх и равной, конечно, весу тела. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Когда связь одновременно препятствует перемещениям тела по нескольким направлениям, направление реакции связи также наперед неизвестно и должно определяться в результате решения рассматриваемой задачи. Рассмотрим, как направлены реакции некоторых основных видов связей. 1. Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Такая поверхность не дает телу перемещаться только по направлению общего перпендикуляра (нормали) к поверхностям соприкасающихся тел в точке их касания (рис.14,а). Поэтому реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рис. 14,б), то реакция направлена по нормали к другой поверхности. Если поверхности не гладкие, надо добавить еще одну силу – силу трения
Рис.14 Рис.15
Рис.16
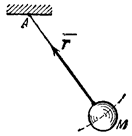
2. Нить. Связь, осуществленная в виде гибкой нерастяжимой нити (рис.15), не дает телу М удаляться от точки подвеса нити по направлению AM. Поэтому реакция Т натянутой нити направлена вдоль нити от тела к точке ее подвеса. Если даже заранее можно догадаться, что реакция направлена к телу, все равно ее надо направить от тела. Таково правило. Оно избавляет от лишних и ненужных предположений и, как убедимся далее, помогает установить сжат стержень или растянут. 3. Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим через отверстия в этих телах, то такое соединение называется шарнирным или просто шарниром; осевая линия болта называется осью шарнира. Тело АВ, прикрепленное шарниром к опоре D (рис.16,а), может поворачиваться как угодно вокруг оси шарнира (в плоскости чертежа); при этом конец А тела не может переместиться ни по какому направлению, перпендикулярному к оси шарнира. Поэтому реакция R цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной к оси шарнира, т.е. в плоскости Аху. Для силы R в этом случае наперед не известны ни ее модуль R, ни направление (угол 4. Шаровой шарнир и подпятник. Этот вид связи закрепляет какую-нибудь точку тела так, что она не может совершать никаких перемещений в пространстве. Примерами таких связей служат шаровая пята, с помощью которой прикрепляется фотоаппарат к штативу (рис.16,б) и подшипник с упором (подпятник) (рис. 16,в). Реакция R шарового шарнира или подпятника может иметь любое направление в пространстве. Для нее наперед неизвестны ни модуль реакции R, ни углы, образуемые ею с осями х, у, z.
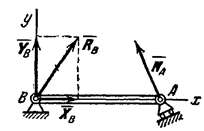
Рис.17 5. Стержень. Пусть в какой-нибудь конструкции связью является стержень АВ, закрепленный на концах шарнирами (рис.17). Примем, что весом стержня по сравнению с воспринимаемой им нагрузкой можно пренебречь. Тогда на стержень будут действовать только две силы приложенные в шарнирах А и В. Но если стержень АВ находится в равновесии, то по аксиоме 1 приложенные в точках А и В силы должны быть направлены вдоль одной прямой, т. е. вдоль оси стержня. Следовательно, нагруженный на концах стержень, весом которого по сравнению с этими нагрузками можно пренебречь, работает только на растяжение или на сжатие. Если такой стержень является связью, то реакция 6. Подвижная шарнирная опора (рис.18, опора А) препятствует движению тела только в направлении перпендикулярном плоскости скольжения опоры. Реакция 7. Неподвижная шарнирная опора (рис.18, опора В). Реакция
Рис.18
Способ закрепления, показанный на рис.18, употребляется для того, чтобы в балке АВ не возникало дополнительных напряжений при изменении ее длины от изменения температуры или от изгиба. Заметим, что если опору А балки (рис.18) сделать тоже неподвижной, то балка при действии на нее любой плоской системы сил будет статически неопределимой, так как тогда в три уравнения равновесия войдут четыре неизвестные реакции 8. Неподвижная защемляющая опора или жесткая заделка (рис.19). В этом случае на заделанный конец балки со стороны опорных плоскостей действует система распределенных сил реакций. Считая эти силы приведенными к центру А, мы можем их заменить одной наперед неизвестной силой
Рис.19 При определении реакций связи других конструкций надо установить, разрешает ли она двигаться вдоль трех взаимно перпендикулярных осей и вращаться вокруг этих осей. Если препятствует какому-либо движению – показать соответствующую силу, если препятствует вращению – пару с соответствующим моментом. Иногда приходится исследовать равновесие нетвердых тел. При этом будем пользоваться предположением, что если это нетвердое тело находится в равновесии под действием сил, то его можно рассматривать как твердое тело, используя все правила и методы статики. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 283; Нарушение авторского права страницы
 , которая направлена перпендикулярно нормальной реакции
, которая направлена перпендикулярно нормальной реакции  в сторону, противоположную возможному скольжению тела.
в сторону, противоположную возможному скольжению тела.

 ).
).
 такой опоры направлена по нормали к поверхности, на которую опираются катки подвижной опоры.
такой опоры направлена по нормали к поверхности, на которую опираются катки подвижной опоры. такой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа. При решении задач будем реакцию
такой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа. При решении задач будем реакцию  изображать ее составляющими
изображать ее составляющими  и
и  по направлениям осей координат. Если мы, решив задачу, найдем
по направлениям осей координат. Если мы, решив задачу, найдем 
 ,
,  ,
,  ,
,  .
. , приложенной в этом центре, и парой с наперед неизвестным моментом
, приложенной в этом центре, и парой с наперед неизвестным моментом  . Силу
. Силу  можно в свою очередь изобразить ее составляющими
можно в свою очередь изобразить ее составляющими  и
и  . Таким образом, для нахождения реакции неподвижной защемляющей опоры надо определить три неизвестных величины
. Таким образом, для нахождения реакции неподвижной защемляющей опоры надо определить три неизвестных величины  ,
,  и
и  . Если под такую балку где-нибудь в точке В подвести еще одну опору, то балка станет статически неопределимой.
. Если под такую балку где-нибудь в точке В подвести еще одну опору, то балка станет статически неопределимой.