
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор критериев оптимизации при проектировании робототехнических средств
При проектировании робототехнических средств текстильных машин необходимо решить задачу многокритериальной оптимизации, определяемой наличием множества целевых функций, которые выявляются по следующим критериям: – определяется максимальное число исполнительных механизмов РС в соответствии с выполняемыми технологическими операциями по обслуживанию текстильной машины; – определяется минимальное число характерных точек траектории отдельного исполнительного механизма РС соответственно выполняемой им вспомогательной технологической текстильной операции; – выбирается последовательность обхода этих точек выходным звеном исполнительного механизма РС в соответствии с выполняемой технологической текстильной операцией; – выбирается тип траектории выходного звена исполнительного механизма РС в соответствии с числом характерных точек, последовательностью их обхода и выполняемой технологической текстильной операцией; – выбирается в соответствии с типом траектории необходимая структурная схема исполнительного механизма РС; – выявляются общие характерные точки траекторий выходных звеньев исполнительных механизмов РС в пространстве и во времени, т.е. производится синхронизация работы РС и обслуживаемой им текстильной машины; – определяются законы движения выходных звеньев исполнительных механизмов РС между характерными точками, которые соответствуют выполняемой технологической текстильной операции; – определяются максимальные конструктивные размеры исполнительных механизмов РС по выявленным законам движения; – определяются в соответствии с конструктивными размерами исполнительных механизмов РС кинематические и динамические параметры их выходных звеньев; – производится оценка допуска позиционирования, кинематических и динамических параметров выходных звеньев исполнительных механизмов РС в соответствии с обслуживаемой текстильной машиной; – производится оценка габаритных размеров РС по отношению к обслуживаемой им текстильной машине. В данной многокритериальной задаче встречаются все четыре типа целевых критерия: больше или равно; меньше или равно; равенство и диапазон. В соответствии с вышеприведенными критериями запишем условия задачи:
Цель Цель Цель Цель Цель Цель Цель Цель Цель Цель Цель при
где В в фигурных скобках справа стоят те значения критериев Покажем определение предельных значений Максимальное число исполнительных механизмов РС текстильной машины – а) б) в) г) д) е) ж) Минимальное число характерных точек траектории ИМ – а) б) в) г) д) е) Последовательность обхода характерных точек выходным звеном ИМ – а) б) Тип траектории выходного звена ИМ – а) б) в) г) д) е) Структурная схема ИМ – а) б) в) г) д) е) Количество характерных точек траектории выходных звеньев исполнительных механизмов РС текстильной машины – а) б) в) г) д) е) ж) Законы движения выходных звеньев ИМ между характерными точками – а) б) в) Максимальные конструктивные размеры исполнительных механизмов РС текстильной машины – а) б) Кинематические и динамические параметры выходных звеньев исполнительных механизмов РС текстильной машины – а) б) Допуск позиционирования, кинематических и динамических параметров выходных звеньев исполнительных механизмов РС текстильной машины – а) б) Габаритные размеры РС текстильной машины – а) б) С целью уменьшения затрат машинного времени ЭВМ и учета конкретных требований заказчика на проектируемое РС текстильной машины необходимо ввести приоритет целей. Приоритетом первого уровня – габаритные размеры РС текстильной машины; – тип траектории и число характерных точек выходных звеньев исполнительных механизмов. Схема выполнения приоритета целей РС для существующих типов текстильных машин представлена на рис. 10. Для решения данной задачи на ЭВМ требуется ввести шкалу экспертных оценок для значений критериев, имеющих информативно-смысловой характер. На примере некоторых типов механизмов покажем возможность введения шкалы экспертных оценок. Кулисный, кривошипно-ползунный и шарнирный четырехзвенный механизмы относятся к плоским рычажным механизмам, а плоские рычажные механизмы, звенья которых образуют вращательные или поступательные пары, получили широкое распространение в современном машиностроении в связи с присущими им достоинствами: высокой технологичностью изготовления, возможностью выполнения шарнирных соединений на подшипниках качения и небольшим износом соприкасающихся поверхностей, долговечностью, надежностью в работе и ремонтопригодностью. Зубчатые механизмы относятся к механизмам, имеющим высшие кинематические пары. Такие механизмы обладают сравнительной сложностью изготовления, необходимостью высокой культуры производства для среднескоростных и быстроходных зубчатых передач. Кроме того, для изготовления зубчатых передач требуется использование специального оборудования и высококачественного инструмента для достижения необходимой точности и плавности работы механизма.
Рис. 10. Схема выполнения приоритета целей для робототехнического средства
При выборе шкалы экспертных оценок по показателям сложности изготовления и надежности работы наивысший балл получают плоские рычажные механизмы. При изменении базового показателя экспертной шкалы может измениться и оценка, которую получает механизм. После выбора необходимых предельных значений |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 197; Нарушение авторского права страницы
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ,
,  …
…  – градиенты 1…11‑ й целевых функций;
– градиенты 1…11‑ й целевых функций;  – значения 1…11‑ го критериев;
– значения 1…11‑ го критериев;  – множество допустимых значений переменных.
– множество допустимых значений переменных. , которые должны быть достигнуты по отношению к заданным значениям
, которые должны быть достигнуты по отношению к заданным значениям  целей.
целей. целевых функций по всем вышеперечисленным критериям.
целевых функций по всем вышеперечисленным критериям. , где:
, где:  – два исполнительных механизма;
– два исполнительных механизма;  – три ИМ;
– три ИМ;  – четыре ИМ;
– четыре ИМ;  – пять ИМ;
– пять ИМ;  – шесть ИМ;
– шесть ИМ;  – семь ИМ;
– семь ИМ;  – восемь ИМ.
– восемь ИМ. , где:
, где:  – одна точка;
– одна точка;  – две точки;
– две точки;  – три точки;
– три точки;  – четыре точки;
– четыре точки;  – пять точек;
– пять точек;  – шесть точек.
– шесть точек. , где:
, где:  – выборочно;
– выборочно;  – в соответствии с последовательностью изменения значений их текущих координат.
– в соответствии с последовательностью изменения значений их текущих координат. , где:
, где:  – прямая линия;
– прямая линия;  – дуга окружности;
– дуга окружности;  – линия, проходящая через m характерных точек;
– линия, проходящая через m характерных точек;  – линия, в определенной своей части соответствующая требуемой траектории выходного звена;
– линия, в определенной своей части соответствующая требуемой траектории выходного звена;  – шатунная кривая;
– шатунная кривая;  – сателлитовая кривая.
– сателлитовая кривая. , где:
, где:  – кривошипно-ползунный механизм;
– кривошипно-ползунный механизм;  – шарнирный четырехзвенный механизм;
– шарнирный четырехзвенный механизм;  – кулисный механизм;
– кулисный механизм;  – зубчатый механизм;
– зубчатый механизм;  – кулачковый механизм;
– кулачковый механизм;  – зубчато-рычажный механизм.
– зубчато-рычажный механизм. , где:
, где:  – имеется одна общая точка;
– имеется одна общая точка;  – две общих точки;
– две общих точки;  – три общих точки;
– три общих точки;  – четыре общих точки;
– четыре общих точки;  – пять общих точек;
– пять общих точек;  – шесть общих точек;
– шесть общих точек;  – семь общих точек.
– семь общих точек. , где:
, где:  – прямая линия;
– прямая линия;  – дуга окружности;
– дуга окружности;  – кубический сплайн.
– кубический сплайн. , где:
, где:  – нижний предел максимальных конструктивных размеров;
– нижний предел максимальных конструктивных размеров;  – верхний предел максимальных конструктивных размеров.
– верхний предел максимальных конструктивных размеров. , где:
, где:  – нижний предел кинематических и динамических параметров;
– нижний предел кинематических и динамических параметров;  , где:
, где:  – нижнее отклонение допусков;
– нижнее отклонение допусков;  – верхнее отклонение допусков.
– верхнее отклонение допусков. , где:
, где:  – нижний предел размеров;
– нижний предел размеров;  – верхний предел размеров.
– верхний предел размеров. целей РС для существующих типов текстильных машин будут следующие критерии:
целей РС для существующих типов текстильных машин будут следующие критерии: 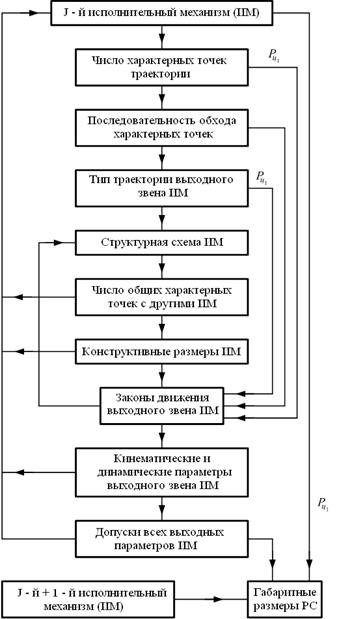
 целевых функций всех критериев, введения приоритета целей и шкалы экспертных оценок задача решается методами целевого программирования.
целевых функций всех критериев, введения приоритета целей и шкалы экспертных оценок задача решается методами целевого программирования.