|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
По курсу «Микропроцессорные устройства систем управления»Стр 1 из 6Следующая ⇒
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА В Г. ТАГАНРОГЕ Факультет автоматики и вычислительной техники Кафедра систем автоматического управления___
Пояснительная записка К курсовому проекту По курсу «Микропроцессорные устройства систем управления» на тему: «Микроконтроллерный регулятор оптимальной системы управления»
Вариант №4
Выполнил: Студент гр. А-144Безродный С.В.
Проверил: профессор кафедры САУ Крутчинский С.Г.
Таганрог 200 8 Содержание: 1. Введение 2. Техническое задание 3. Синтез фильтра нижних частот 4. Синтез канала №1 4.1. Первичный преобразователь 4.2. Инструментальный усилитель 5. Синтез канала №2 5.1. Датчик с токовым выходом 5.2. Преобразователь ток-напряжение 6. Аналого-цифровой преобразователь 7. Микроконтроллер AT90S8535 7.1. Прикладная программа микроконтроллерного регулятора 8. Выбор элементной базы 9. Анализ качественных показателей МКС 10. Заключение 11. Список литературы ВВЕДЕНИЕ Автоматизация различных технологических процессов, эффективное управление различными агрегатами, машинами, механизмами требуют многочисленных измерений разнообразных физических величин. Для организации сбора данных с датчиков используется микроконтроллер, с помощью которого осуществляется контроль над технологическими процессами в производстве. Между датчиком и микроконтроллером обязательно должен присутствовать канал обработки данных, который осуществляет усиление, фильтрацию и нормирование сигнала, подавление синфазной помехи; производится нелинейная обработка сигнала с целью линеаризации характеристики датчика и приведение аналогового сигнала к виду, пригодному для ввода в аналого-цифровой преобразователь (АЦП). В ходе выполнения данного курсового проекта необходимо синтезировать устройство согласования первичного преобразователя (датчика) с микроконтроллером. В данном устройстве первым узлом является датчик, а АЦП является оконечным узлом проектируемого устройства, и все другие составные функциональные единицы прямо или косвенно обеспечивают его нормальное функционирование. Синтезируемое устройство содержит два параллельных канала передачи сигналов: датчик – усилитель – фильтр нижних частот – аналого-цифровой преобразователь.
Рис.1. Схема проектируемого устройства. При внедрении данного типа систем в производство используют многоканальные структуры, позволяющие подключение к микроконтроллеру нескольких датчиков. В данном курсовом проекте необходимо синтезировать двухканальное устройство согласования, произвести расчет всех необходимых параметров устройства и путем моделирования оценить работоспособности системы Синтезированная система должна имеет высокую интеграцию и универсальность, обладает модернизационным запасом, стабильностью работы и высоким быстродействием. ТЕХНИЧЕСКОЕ ЗАДАНИЕ.
Разработать двухканальную микроконтроллерную систему и программный продукт, обеспечивающие реализацию оптимального по комплексному критерию закона управления: где
В приведенных выражениях
Величина Величина
СИНТЕЗ КАНАЛА №1. Первичный преобразователь.
Тензопреобразователь ВЮМА 4030 309.001 РЭ Описание. Тензопреобразователь ВЮМА предназначен для непрерывного пропорционального преобразования силы (серия С) или давления (серия Д) в электрический сигнал. Климатическое исполнение тензопреобразователей по ГОСТ 15150 в рабочем интервале температур от -500С до 800С. Преобразуемый параметр: - сила от -5 до 5Н, - давление от 0, 1 до 0, 6 МПа. Электрическое питание осуществляется постоянным током 1, 5±0, 3 мА. Начальное значение выходного сигнала, соответствующее нулевому значению преобразуемого параметра, не должно превышать по абсолютной величине 10 мВ. Величина сопротивления моста должна находится в пределах 4, 5±0, 35 кОм. Нелинейность выходного сигнала Перемещение конца рычага тензопреобразователей серии С, соответствующее изменению силы от нуля до верхнего предельного значения должно быть в пределах 0, 25±0, 003 мм. Вариация выходного сигнала Изменение начального значения выходного сигнала на каждые 100С, вызванное изменением температуры окружающей среды по абсолютной величине, должно быть не более 2мВ. Величина сопротивления моста при температуре 80±30С должна быть не более 5, 3кОм. Средний срок службы 12 лет. Инструментальный усилитель.
В разрабатываемой микроконтроллерной системе входной блок состоит из измерительного моста и инструментального усилителя. Заметную роль в данной схеме играет входной, масштабный усилитель, в основном от того с какой точностью будет усиливаться входной сигнал, зависит погрешность преобразования АЦП. Согласно техническому заданию, входная величина
Рис.6. Измерительный мост и инструментальный усилитель.
Таким образом при согласовании ОУ1 и ОУ2 результирующая погрешность будет определяться параметрами ОУ3. Измерительный мост преобразует значения входной величины Напряжение на выходе усилителя определяется соотношением: Примем Выбираем значения Таким образом, чтобы получить единичный коэффициент усиления ИУ нужно выбрать
Рис.7. Схема канала №1. Рис.8. АЧХ и ФЧХ канала №1. В качестве прецизионного инструментального усилителя можно использовать МАХ 4195:
СИНТЕЗ КАНАЛА №2. Назначение. Датчик давления Арктур-01 (в дальнейшем – датчик) предназначен для непрерывного преобразования избыточного давления жидкостей и газов, в унифицированный токовый выходной сигнал. Датчик может применяться при контроле, регулировании и управлении технологическими процессами, а также при учете, в том числе коммерческом, жидкости и газа. Арктур-01–цифровой датчик избыточного давления, имеющий климатическое исполнение УХЛ1 по ГОСТ 15150, предназначенные для работы при температуре окружающей среды от минус 40°С до +80°С, преобразующий измеряемое давление в унифицированный токовый выходной сигнал 0-5 мА (по 4-х-проводной линии связи) или 4-20 мА (по 2-х-проводной линии связи). Датчик имеет невзрывозащищенное исполнение. По эксплуатационной законченности датчики являются изделиями ГСП третьего порядка по ГОСТ 12299. МИКРОКОНТРОЛЛЕР. Микроконтроллеры фирмы ATMEL с усовершенствованной RISC архитектурой обладают эффективными программно-аппаратными ресурсами для решения различных задач. Семейство микроконтроллеров AVR содержит и простые модели (AT90S1200, AT90S2313) с минимумом необходимых ресурсов, и весьма сложные модели megaAVR с существенно увеличенным объемом памяти, количеством портов ввода-вывода и других средств. Высокая эффективность микроконтроллеров AVR обеспечивается развитой системой команд, выполняющихся, как правило, за один рабочий такт, аппаратной реализацией многих стандартных функций (таймеры, модуляторы ШИМ, параллельные и последовательные порты ввода-вывода, компаратор, АЦП и др.) и возможностью внутрисистемного программирования, т.е. записи программ и данных в ПЗУ микроконтроллера непосредственно в схеме работающего устройства. Общие архитектурные особенности и программная совместимость микроконтроллеров AVR позволяют использовать одни и те же алгоритмы и рабочие программы на разных моделях. Единственным ограничением применимости может служить только отсутствие необходимых для исполнения программ аппаратных средств в более простых моделях микроконтроллеров. Существенной общей особенностью всего семейства AVR является использование 32 регистров общего назначения и гарвардской архитектуры с тремя раздельными адресными пространствами: памяти программ (флэш-памяти), оперативной памяти данных (ОЗУ), программируемой постоянной памяти данных (ППЗУ). Флэш-память и ППЗУ являются энергонезависимыми и, как обычно, сохраняют данные при отсутствии питающих напряжений. ОЗУ - это стандартная энергозависимая оперативная память. Система команд поддерживает стандартные операции с однобайтовыми данными, возможны определенные операции с двухбайтовыми словами и отдельными битами. Каждый из 32 восьмиразрядных регистров общего назначения может служить регистром-аккумулятором. Основной формат кодов команд - 2 байта, формат данных - 1 байт. Управление и доступ к аппаратным средствам микроконтроллеров производятся с помощью специальных управляющих регистров - регистров ввода-вывода. Эти регистры определяют параметры и режимы работы устройств микроконтроллеров, обеспечивают необходимый обмен данными с ними. Система прерываний позволяет обслуживать программные прерывания, внутренние прерывания всех устройств микроконтроллеров через регистры ввода-вывода и внешние прерывания. Внутренние аппаратные и внешние прерывания имеют жестко закрепленные адреса векторов прерываний. Микроконтроллер AT90S8535 (рис. 16) со 118 командами в системе команд содержит 8-разрядное арифметико-логическое устройство (АЛУ), память программ (флэш-память) объемом 8 Кбайт, электрически программируемое ППЗУ (EEPROM) объемом 0, 5 Кбайт (также с возможностью внутрисистемного программирования), статическое ОЗУ объемом 0, 5 Кбайт, 32 регистра общего назначения, 4 двунаправленных параллельных восьмиразрядных порта ввода-вывода, последовательный синхронный интерфейс SPI, последовательный асинхронный интерфейс UART, два восьмиразрядных и один шестнадцатиразрядный таймеры с возможностью реализации модулятора ШИМ, сторожевой таймер с автономным генератором, аналоговый компаратор, восьмиканальный АЦП. На структурной схеме (рис.16) и в дальнейшем при описании микроконтроллеров будут использованы названия и обозначения, используемые фирмой ATMEL. Внешние выводы микроконтроллера: VCC и GND (общий) - источник питания цифровых элементов; AVCC, AGND (общий аналоговый), AREF - питание и опорное напряжение АЦП и его мультиплексора; RESET - сигнал внешнего сброса (низкий уровень длительностью более 50 не), при включении питания сброс микроконтроллера производится автоматически; XTAL1 и XTAL2 - соответственно вход и выход тактового генератора (для подключения частотозадающего кварцевого резонатора и общей синхронизации с другими устройствами), аналогичные электроды вспомогательного генератора асинхронного режима таймера 2 - выводы РС6 и РС7; РАО-РА7, РВО-РВ7, РСО-РС7, PDO-PD7 - 32 линии ввода-вывода, объединены в 4 восьмиразрядных порта (PORTA, PORTB, PORTC, PORTD). PORTA, PORTB, PORTC, PORTD могут использоваться как стандартные двунаправленные порты ввода-вывода либо для передачи сигналов других устройств микроконтроллера. Альтернативные функции PORTA: передача аналоговых сигналов через мультиплексор на вход АЦП. Альтернативные функции PORTB: Рис.16. Структурная схема микроконтроллера АТ90 S 8535. РВО и РВ1 - внешние входы ТО и Т1 таймеров 0 и 1 соответственно, РВ2 и РВЗ - входы AINO и AIN1 аналогового компаратора, остальные сигналы синхронного последователь- ного интерфейса SPI (PB4 - SS, PB5 - MOSI, PB6 - MISO, РВ7 - SCK). Альтернативные функции PORTC: PC6 и РС7 - вход и выход вспомогательного генератора таймера 2. Альтернативные функции PORTD: PDO и PD1 - сигналы RXD и TXD асинхронного последовательного интерфейса UART соответственно, PD2 и РВЗ сигналы внешних прерываний INTO и INT1, PD4-PD7 - сигналы ОС1В, OCIA, TCP, OC2 таймеров 1 и 2. NOLIST . INCLUDE " 8535 def. inc " LIST CSEG . org $000 rjmp reset; прерывание по reset . org $00 e rjmp adc 0; прерывание по завершению преобразования АЦП . ORG$011
Reset: ldi r16, low(RAMEND) Out SPL, r16 Ldi r16, high(RAMEND) out SPH, r 16; определить в указателе стека адрес RAMEND l di r 16, 0 b 11111110 out admux, r 16; преобразовывать сигнал с первого выхода мультиплексора РА1 out DDRA, r 16 ; определить все биты порта A на ввод Ldi r 16, 0 b 11111110 out portA, r16; определить пассивный высокий уровень сигнала для всех битов порта А ser r16; установить все биты $ff в регистр r16 out DDR B, r16 ; порт B на вывод
Ldi r16, 0b11001110 out adcsr, r16; инициализация АЦП ldi r16, 0b00000110 ; инициализация записи в ППЗУ Out EECR, r16 ldi r16, 0b00000000 ; инициализация чтения из ППЗУ Out EECR, r16 sei ; флаг глобального разрешения прерываний Main: Nop rjmp main
adc 0:; подпрограмма обработки прерываний АЦП inc r20 Cpi r20, 1 Brne adc1 in r17, ADCL; занести младший байт кода результата преобразования АЦП в регистр r17 in r 18, ADCH; занести старший байт кода результата преобразования АЦП в регистр r18 Ldi r 16, 0 b 00000001 out admux, r16 ; преобразовывать сигнал с первого выхода мультиплексора РА0 x1 sbi adcsr, ADSC; запустить АЦП для однократного преобразования reti adc1: clr r20 i n r21, ADCL ; занести младший байт кода результата преобразования АЦП в регистр r21 in r22, ADCH; занести старший байт кода результата преобразования АЦП в регистр r22 Ldi r23, 0b10110011 ldi r24, 0b01101011; занести С1 Ldi r27, 0 b 00000110 ldi r 28, 0b11010101; занести С2 cpi r 28, r 18; сравнить C2 и x2 brne u 1; перейти если разность (C2-x2) отрицательная Cpi r 27, r 17 Brne u 1
cpi r 22, r 24 ; сравнить С1 и x1 brne u 1; перейти если разность (С1-х1) отрицательная Cpi r 21, r 23 Brne u 1
ldi r16, 0b0000001; загрузить U2 линейная зависимость Out PORTB, r16 Reti u1: Lsl r17 Rol r18 Out EEARL, r17 Out EEARH, r18 Sbi EECR, EERE rcall pausa ; задержка для нормального чтения из ППЗУ In r11, EEDR Cpi r22, r11 Brne otrsign Ldi r31, 1 Clr r30 Add r17, r31 Adc r18, r30 Out EEARL, r17 Out EEARH, r18 Sbi EECR, EERE rcall pausa; задержка для нормального чтения из ППЗУ
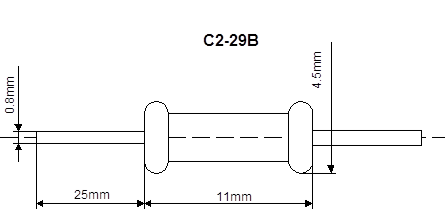
in r11, EEDR Cpi r21, r10 Brne otrsign ldi r16, 0b0000010; загрузить U1 нелинейная зависимость Out PORTB, r 16 sbi adcsr, ADSC ; запустить АЦП для однократного преобразования Ret i otr sign: ldi r16, 0b0000100 ; загрузить U1 с обратным знаком нелинейная зависимость Out portB, r 16 sbi adcsr, ADSC ; запустить АЦП для однократного преобразования Ret i ; подпрограмма задержки для нормального чтения из ППЗУ Pausa: inc r29 cpi r29, r39 brne pausa clr r29 reti ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ. Выбор резисторов В спроектированном устройстве будем использовать прецизионные резисторы типа С2-29. Это резисторы с металлодиэлектрическим проводящим слоем, предназначенные для работы в высокоточных электрических цепях постоянного, переменного и импульсного тока в качестве элементов навесного монтажа. Резисторы типа С2-29 относятся к изолированным. По шкале Е192 резисторы имеют точность: XR=0, 001 Температурный коэффициент сопротивления: aR=5, 5·10-5 1/0С (при -10< t< 200C) aR=5·10-5 1/0С (при 20< t< 500C)
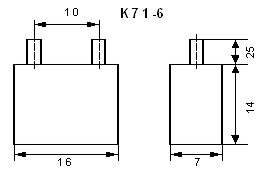
Рис.20. Вид резистора С2-29В Выбор конденсаторов Также в схеме будем использовать конденсаторы типа К71-6.
Рис.21. Конденсатор типа K 71-6. Конденсаторы К71-6 предназначены для работы в цепях постоянного, переменного и импульсного тока. Имеют цилиндрический металлический герметизированный корпус. Диапазон рабочих температур: -60 … +200 0С. ЗАКЛЮЧЕНИЕ Для автоматизации производства и технологических процессов датчики являются неотъемлемой составляющей частью САУ. Датчики с цифровым выходом всё более вытесняют датчики с аналоговым выходом из-за простоты разработки канала обмена с микроконтроллером, но каналы обработки аналогового сигнала по сей день имеют более высокую интеграцию и универсальность за счёт того, что компоненты, которые включает в себя канал предназначены для универсальных подсистем. На базе АЦП, ЦАП, коммутаторов, схем выборки и хранения, операционных усилителей и других аналоговых элементов разрабатывают операционные узлы, способные обрабатывать аналоговую информацию без преобразования ее в цифровую форму. Каналы обработки аналоговой информации обладают большим быстродействием по сравнению с каналами обработки цифровой информации. При выполнении данного курсового проекта было разработано двухканальное устройство согласования датчиков с микроконтроллером, произведен расчет параметров системы, выполнено моделирование. Данное устройство имеет высокую интеграцию и универсальность, обладает модернизационным запасом, стабильностью работы и высоким быстродействием, что подтверждают проделанные расчеты и результаты моделирование. СПИСОК ЛИТЕРАТУРЫ 1) А.В. Евстифеев Микроконтроллеры AVR семейства Classic фирмы ATMEL. Москва, Издательский дом «Додэка-XXI», 2006. 2) Иванов Ю.И., Югай В.Я. Микропроцессорные устройства систем управления. Учебное пособие для вузов. -Таганрог. Изд. ТРТУ, 2005. 3) Иванов Ю.И., Югай В.Я. Применение микроконтроллеров AVR. Учебное пособие, Таганрог. Изд. ТРТУ, 2003. 4) Крутчинский С.Г., Маньков Ю.В. Микроконтроллеры и локальные системы. Методическое пособие по проектированию. Таганрог. Изд. ТРТУ, 1999. 5) Иванов Ю.И., Югай В.Я. Интерфейсы средств автоматизации. Учебное пособие.-Таганрог. Изд. ТРТУ, 2005. 6) Баранов В.Н. Применение микроконтроллеров AVR. Схемы, алгоритмы, программы. Издательский дом «Додэка-XXI», 2004 7) «Микросхемы ЦАП и АЦП»/ Б.Г. Федорков, В.А. Телец, М.: Энергоатомиздат 1990, 320с. 8) Справочник «Резисторы», под редакцией Четверткова. МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА В Г. ТАГАНРОГЕ Факультет автоматики и вычислительной техники Кафедра систем автоматического управления___
Пояснительная записка К курсовому проекту по курсу «Микропроцессорные устройства систем управления» на тему: «Микроконтроллерный регулятор оптимальной системы управления»
Вариант №4
Выполнил: Студент гр. А-144Безродный С.В.
Проверил: профессор кафедры САУ Крутчинский С.Г.
Таганрог 200 8 Содержание: 1. Введение 2. Техническое задание 3. Синтез фильтра нижних частот 4. Синтез канала №1 4.1. Первичный преобразователь 4.2. Инструментальный усилитель 5. Синтез канала №2 5.1. Датчик с токовым выходом 5.2. Преобразователь ток-напряжение 6. Аналого-цифровой преобразователь 7. Микроконтроллер AT90S8535 7.1. Прикладная программа микроконтроллерного регулятора 8. Выбор элементной базы 9. Анализ качественных показателей МКС 10. Заключение 11. Список литературы ВВЕДЕНИЕ Автоматизация различных технологических процессов, эффективное управление различными агрегатами, машинами, механизмами требуют многочисленных измерений разнообразных физических величин. Для организации сбора данных с датчиков используется микроконтроллер, с помощью которого осуществляется контроль над технологическими процессами в производстве. Между датчиком и микроконтроллером обязательно должен присутствовать канал обработки данных, который осуществляет усиление, фильтрацию и нормирование сигнала, подавление синфазной помехи; производится нелинейная обработка сигнала с целью линеаризации характеристики датчика и приведение аналогового сигнала к виду, пригодному для ввода в аналого-цифровой преобразователь (АЦП). В ходе выполнения данного курсового проекта необходимо синтезировать устройство согласования первичного преобразователя (датчика) с микроконтроллером. В данном устройстве первым узлом является датчик, а АЦП является оконечным узлом проектируемого устройства, и все другие составные функциональные единицы прямо или косвенно обеспечивают его нормальное функционирование. Синтезируемое устройство содержит два параллельных канала передачи сигналов: датчик – усилитель – фильтр нижних частот – аналого-цифровой преобразователь.
Рис.1. Схема проектируемого устройства. При внедрении данного типа систем в производство используют многоканальные структуры, позволяющие подключение к микроконтроллеру нескольких датчиков. В данном курсовом проекте необходимо синтезировать двухканальное устройство согласования, произвести расчет всех необходимых параметров устройства и путем моделирования оценить работоспособности системы Синтезированная система должна имеет высокую интеграцию и универсальность, обладает модернизационным запасом, стабильностью работы и высоким быстродействием. ТЕХНИЧЕСКОЕ ЗАДАНИЕ.
Разработать двухканальную микроконтроллерную систему и программный продукт, обеспечивающие реализацию оптимального по комплексному критерию закона управления: где
В приведенных выражениях
Величина Величина
|
Последнее изменение этой страницы: 2019-10-24; Просмотров: 175; Нарушение авторского права страницы

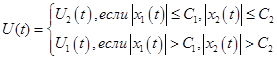


 ,
,  представляют собой сигналы аналоговых датчиков (имеют размерность “Вольт”). Все прочие величины являются константами.
представляют собой сигналы аналоговых датчиков (имеют размерность “Вольт”). Все прочие величины являются константами. , В
, В
 , В
, В
 , В
, В
 , В
, В






 в пределах номинального значения диапазона изменения преобразуемого параметра, выраженная в процентах от диапазона выходного сигнала, должна быть не более 0, 15%.
в пределах номинального значения диапазона изменения преобразуемого параметра, выраженная в процентах от диапазона выходного сигнала, должна быть не более 0, 15%. от диапазона выходного сигнала, должна быть не более 0, 1%.
от диапазона выходного сигнала, должна быть не более 0, 1%. измеряется сенсорным элементом (измерительный мост), а величина
измеряется сенсорным элементом (измерительный мост), а величина  - с помощью датчика с токовым выходом. Так как датчик имеет большую синфазную помеху, в качестве масштабного усилителя используется инструментальный, который согласовывает
- с помощью датчика с токовым выходом. Так как датчик имеет большую синфазную помеху, в качестве масштабного усилителя используется инструментальный, который согласовывает  с опорным источником напряжения. Схемы измерительного моста и инструментального усилителя имеют вид:
с опорным источником напряжения. Схемы измерительного моста и инструментального усилителя имеют вид: 
 в эквивалентное ей значение напряжения (с коэффициентом пропорциональности
в эквивалентное ей значение напряжения (с коэффициентом пропорциональности  ), в соответствии с законом изменения значений реостата
), в соответствии с законом изменения значений реостата  . Параметры ОУ выбираются из условия минимизации дрейфа нуля.
. Параметры ОУ выбираются из условия минимизации дрейфа нуля. , где
, где  - коэффициент усиления схемы.
- коэффициент усиления схемы. В.
В. кОм,
кОм,  кОм.
кОм. , тогда
, тогда  В.
В.