
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Назначение электромеханических систем (ЭМС)Стр 1 из 2Следующая ⇒
Назначение электромеханических систем (ЭМС)
1. преобразование механической энергии в электрическую (всевозможные генераторы); 2. преобразование электрической энергии в механическую (двигатель); 3. преобразование напряжения (трансформаторы); 4. функциональное преобразование (можно решать дифференциальное уравнение 2-го порядка).
История. Еще в древности были обнаружены эл. приборы. Кулон создал историю электрической статики поля, но не нашел ей применения. В 1831 г. Фарадей создал теорию электромагнитной индукции. Это первый этап. С 1850 г. – второй этап. Создание постоянного тока. В 50-60 г.г. – появление броненосцев, поездов. Так появилась теория автоматического управления. 1870 г. – третий этап. Д. Добровольский – теория вращения магнитного поля, т. е. Переменного тока. Сейчас ни чего не мысленно без ЭМС. Этапы развития приводов: 1. первые системы управления наз. система генератор-двигатель (ГД). 2. электромашинный усилитель-двигатель (ЭМУД) – генератор и двигатель помещен в один корпус. Надежен, но очень шумен. 3. магнитный усилитель-двигатель (обмотка переменного тока, которые работали как транзистор). Недостаток – инерционность. 4. транзисторный (тиристорный) преобразователь-двигатель (ТПД). Одновременно шло развитие в СУ: - ламповые; - транзистор; - интегральные схемы.
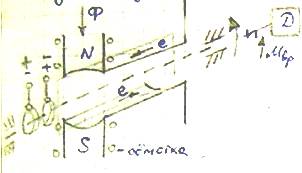
МАШИНЫ ПОСТОЯННОГО ТОКА Принцип действия генератора постоянного тока
Под генератором постоянного тока понимается генератор переменного тока, имеющий устройство для выпрямления, которое наз. коллектор.
Задача – создать мощный магнитный поток.
Для того, чтобы выпрямить переменную ЭДС.
Чтобы увеличить нагрузку необходимо сопротивления подключить параллельно. Напряжение на генераторе можно менять за счет увеличения числа оборотов, увеличения магнитного потока.
Принцип действия двигателя постоянного тока
При включении двигателя в цепь постоянного тока Iв создает Ф, а Iя при взаимодействии с Ф создает электромагнитный момент в якоре, вращающемся в магнитном потоке с w, наводится противо ЭДС Eя=С eФ w напряжения на встречу Iя. На контур с током действует f, а т. к. их много, то ротор вращается. Чтобы повысить скорость, уменьшить магнитный поток и увеличить напряжение. Источником мощности двигателя является напряжение внешней сети.
е n – противо ЭДС.
Классификация ЭМС по мощности
- до 600 Вт – микромашины; - до 5 КВт – машины малой мощности; - от 5-100 КВт – машины средней мощности; - от 100 КВт – машины большой мощности;
Классификация по быстроходности: - до 300-400 об – низкооборотные; - от 300-400 до 6000 об. – машины со средней скоростью; - от 6000 об. – сверхбыстроходная; Существуют ЭМС – 200000 оборотов.
Три вида креплений: - на лапах; - флансовые; - в обоймах.
ЭМС делятся по климатике: -60, +60 оС
Номинальные параметры – параметры ЭМС, на которые рассчитана машина, с точки зрения надежности.
Основные законы электромеханики: 1 все ЭМС обратимы, т. е. Любая ЭМС может работать либо в режиме двигателя, либо в режиме генератора. Режим работы ЭМП зависит от сопротивления на валу. 2 во всех ЭМС КПД< 1.
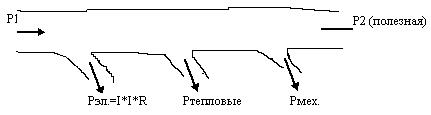
Все ЭМС описываются аналитической диаграммой:
Магнитные потери – потери на вихревые токи и гистерезис
Рмех и Рмагн. не зависят от нагрузки. При равенстве постоянных и переменных потерь КПД максимальна.
3 во всех ЭМС магнитные поля неподвижны относительно друг друга.
4 магнитный поток ЭМС не зависят от нагрузки
Закон электромагнитной индукции
1.
2. по правилу левой руки
Реакция якоря в генераторе
Bn – индукция полюсов; Bрез. – результирующая.
Следствие реакции якоря – геометрический контроль смещается на угол a, образуется физический нейтрон.
Следствия реакции якоря в генераторе: - падает напряжение; - магнитное поле результирующее искажается; - продольная составляющая Фя направлена против оси магнитного потока, тем самым снижает по мере роста нагрузки вых. ЭДС, а следовательно и напряжение; - пики индукции приводят к потенциальному искрению;
Методы борьбы с реакцией якоря в генераторе
2 дополнительные полюса
Реакция якоря в двигателе
В двигателе при том же направления вращения, меняется напряжение тока якоря. Геометрический нейтрал поворачивается на тот же угол a, но против вращения. Следствия реакции якоря: - искажается магнитный поток; - продольная составляющая поля якоря направлена против основного магнитного потока, уменьшает магнитный поток полюсов тем самым приводя к незапланированному уменьшению скорости двигателя, что приводит к нелинейности статических характеристик двигателя. Поперечная составляющая поля якоря приводит к коммутации искрения, а пики индукции к потенциальному искрению.
ЭДС машины постоянного тока
ГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока
Двигатель постоянного тока с независимым возбуждением:
Rп – пусковой реостат Rш – шунта
Статическое уравнение:
Двигатель – это система, питающаяся от источника напряжения.
Типовые механические характеристики эл. машин: 1). Жесткость мех. хар-к: 2). Жесткая хар-ка; 3). Мягкая хар-ка (двигатель постоянного тока с последовательным возбуждением); 4). (хар-ка двигателя постоянного тока с смешанным возбуждением), и мягкая, и жесткая; 5). Мех. хар-ка асинхронного дв-ля с короткозамкнутым; 6). Для синхронных двигателей при 0-ой жесткости; 7). Абсолютно-мягкая хар-ка (получается при питании системы от источника тока).
Универсальный двигатель
Двигатель с последовательным возбуждением, работает как на постоянном так и на переменном токе.
На переменный ток для уменьшения реактивных потерь напряжения уменьшают число витков обмотки возбуждения. Назначение электромеханических систем (ЭМС)
1. преобразование механической энергии в электрическую (всевозможные генераторы); 2. преобразование электрической энергии в механическую (двигатель); 3. преобразование напряжения (трансформаторы); 4. функциональное преобразование (можно решать дифференциальное уравнение 2-го порядка).
История. Еще в древности были обнаружены эл. приборы. Кулон создал историю электрической статики поля, но не нашел ей применения. В 1831 г. Фарадей создал теорию электромагнитной индукции. Это первый этап. С 1850 г. – второй этап. Создание постоянного тока. В 50-60 г.г. – появление броненосцев, поездов. Так появилась теория автоматического управления. 1870 г. – третий этап. Д. Добровольский – теория вращения магнитного поля, т. е. Переменного тока. Сейчас ни чего не мысленно без ЭМС. Этапы развития приводов: 1. первые системы управления наз. система генератор-двигатель (ГД). 2. электромашинный усилитель-двигатель (ЭМУД) – генератор и двигатель помещен в один корпус. Надежен, но очень шумен. 3. магнитный усилитель-двигатель (обмотка переменного тока, которые работали как транзистор). Недостаток – инерционность. 4. транзисторный (тиристорный) преобразователь-двигатель (ТПД). Одновременно шло развитие в СУ: - ламповые; - транзистор; - интегральные схемы.
МАШИНЫ ПОСТОЯННОГО ТОКА |
Последнее изменение этой страницы: 2019-10-24; Просмотров: 157; Нарушение авторского права страницы
 Статор – неподвижная часть.
Статор – неподвижная часть. Источником мощности генератора является внешний вращающий момент от двигателя. ЭДС меняется по синусоидальному закону
Источником мощности генератора является внешний вращающий момент от двигателя. ЭДС меняется по синусоидальному закону





 - коэффициент нагрузки
- коэффициент нагрузки Т. к. магнитный поток при упругости ЭМС может меняться, то все ЭМС с точки зрения динамики можно считать нелинейными системами. Иногда мы пренебрегаем.
Т. к. магнитный поток при упругости ЭМС может меняться, то все ЭМС с точки зрения динамики можно считать нелинейными системами. Иногда мы пренебрегаем. - момент – важнейший параметр ЭМС.
- момент – важнейший параметр ЭМС. - коэффициент намагничивания (насыщения).
- коэффициент намагничивания (насыщения).
 ;
; 
 по правилу правой руки
по правилу правой руки
 3.
3. ;
; 

 1
1 





 - уравнение характеристики статики
- уравнение характеристики статики
 - уравнение эл. мех. характеристики
- уравнение эл. мех. характеристики n=f(Iя), n=f(M), M=Cм*Iя*Ф
n=f(Iя), n=f(M), M=Cм*Iя*Ф - уравнение мех. характеристики
- уравнение мех. характеристики

 По правилу левой руки при изменении напряжения магнитный потока и тока якоря электромагнитная сила не поменяет свое напряжение.
По правилу левой руки при изменении напряжения магнитный потока и тока якоря электромагнитная сила не поменяет свое напряжение.