|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Грузозахватные, грузоведущие, грузонесущие устройства
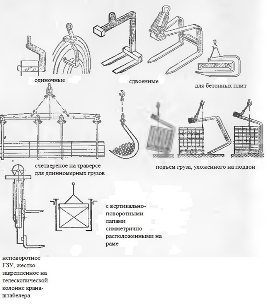
Грузозахватные устройства и приспособления классифицируются по схеме приведенной на Рис. 56.
Рис. 56 Классификация грузозахватных устройств и приспособлений Грузозахватные устройства для штучных грузов - крюки, петли, скобы (карабины), захваты, стропы и траверсы - предназначены для стропки грузов и подвешивания их на крюковую обойму крана. Все крюки должны быть снабжены предохранительными замыкающимися приспособлениями, исключающими возможность выпадения стропов при подъеме или опускании груза. Также к этим устройствам относятся специальные захваты: клещевые, рычажные, эксцентриковые, вакуумные, электромагниты, а также спредеры.
Рис. 57 Грузозахватные устройства для штучных грузов слева направо и сверху вниз: крюки, петли, вилочные, клещевые, рычажные, эксцентриковые, магнитные, вакуумные захваты, спредеры Вилочные (лапчатые) грузозахватные приспособления предназначены для подхвата груза лежащего на подкладках и поддонах, имеющего специальные технологические отверстия, монтажные петли или полости. Особенностью захватов данного вида является положение груза при его подъеме и перемещении — центр тяжести груза должен находится на одной вертикали с точкой подвеса захвата на крюк грузоподъемного механизма, это обязательное условия для предотвращения самопроизвольного падения груза с лап. Для выравнивания центра тяжести используют противовесы, автоматически или вручную перемещаемые точки подвеса захвата, демпферные устройства и т. д. Клещевые (зажимные) грузозахватные приспособления в зависимости от исполнения конструкции могут работать с грузами различной геометрической формы. Захват представляет собой рычажную систему, фиксация груза осуществляется за счет обхвата свободными концами рычагов выступающих элементов груза, например головку рельса, полку балки, закраины бочки или непосредственно сам груз. Разновидностью клещевых захватов являются фрикционно-зажимные приспособления. Удержание груза при их использовании осуществляется за счет силы трения, возникающей при сжатии груза или распора его изнутри прижимными элементами (лапами). Эксцентриковые грузозахватные приспособления предназначены для захвата и перемещения плоских грузов в вертикальном или горизонтальном положении. Принцип действия захватов данного типа состоит в преобразовании эксцентриком подъемной силы в зажимающее усилие. Рабочие элементы груза создают значительную контактную нагрузку, поэтому их применение ограничивается работой с грузами с относительно твердой поверхностью. Наиболее часто эксцентриковые захваты применяются для подъема и перемещения листов металла различной толщины как по отдельности, так и стопками. Современные эксцентриковые захваты выполняются как самозатягивающиеся (с принудительным подведением эксцентрика к поверхности груза при его подъеме), однако существуют так же захваты при работе с которыми необходим ручной первоначальный зажим груза с небольшим усилием. Для работы с ферромагнитными грузами широко применяются электромагниты и захваты на основе постоянных магнитов. Магнитные захваты приспособлены для перегрузки стальных и частично чугунных изделий любой формы, при этом от формы груза и воздушного зазора зависит и грузоподъемность приспособления. Для работы электромагнитов требуется подведение питания, которое, как правило, подводится от бортовой сети крана. Подвод электроэнергии к магниту осуществляется шланговым кабелем. При небольших высотах подъема кабель закрепляется петлеобразно, и при изменении высоты подъема изменяется его провис, при больших высотах подъема грузов на кране устанавливают кабельные барабаны, автоматически поддерживающие кабель с необходимым натяжением. При работе с относительно небольшими по массе плоскими грузами более целесообразно использовать захваты на основе постоянных магнитов. Основным их преимуществом является независимость от внешних источников питания. Фиксация груза осуществляется посредством активации магнитного поля в момент нахождения захвата на поверхности груза. Активация магнитных силовых линий происходит с помощью ручки-переключателя или автоматического механизма. Одним из наиболее современных грузозахватных приспособлений являются вакуумные захваты. Принцип работы захватов заключается в следующем — в установленной на поверхности груза камере создается область разреженного воздуха (вакуум), под действием атмосферного давления возникает сила взаимодействия (притяжения) между грузом и захватом. Для работы данным захватом есть ограничение — груз должен быть выполнен из относительно воздухонепроницаемого материала с гладкой поверхностью (стекло, прокат металла, полированный мрамор и т. д.). Вакуумные захваты удобны для работы с грузами не имеющими точек крепления, при этом позволяют быстро произвести его захват и высвобождение, захват бережно относится к поверхности поднимаемого груза и осуществляет подъем не повреждая её. Конструкция захватов данного вида и характер их использования зависит от способа создания разрежения в вакуумной камере и методов её девакуумизации. Механические захваты для контейнеров предназначены для надежного крепления на контейнерах с целью их последующих перемещения и транспортировки. Такие захваты для контейнеров называются спредеры. Это специальные грузозахватные устройства, которые применяются для перегрузки контейнеров. В каждом углу контейнера размещены специальные элементы, называемые фитинги, которые используются как опора контейнеров во время их штабелирования и как элемент при захвате контейнеров во время их перегрузки. Спредеры, или захваты для контейнеров, бывают нескольких различных конструкций. Основное их достоинство в том, что они являются автоматическими или полуавтоматическими. К грузозахватным устройствам для навалочных грузов относятся различные емкости: бадьи, ковши, бункеры и специальные захваты — грейферы. Грейфер при работе крана закрывается и открывается полуавтоматически. Навалочный груз захватывается при сведении челюстей грейфера. Классификация грейферов приведена в следующей таблице. Таблица 18 Классификация грейферов
На Рис. 58 представлены слева направо и сверху вниз грейферы двухчелюстные: одноканатный, двухканатный, четырехканатный, гидравлический, моторный, лесной, многочелюстной (полип).
Рис. 58 Грейферы
К грузонесущим, грузотолкающим или грузоведущим органам, применяемым в конвейерам с тяговым органом относятся для ленточного конвейера, ленточно-канатного, ленточно-цепного – лента, для пластинчатого – пластины, для ковшевого – ковши, для скребкового – скребки, для подвесного – каретки, для тележечного – тележки (Рис. 59)
Рис. 59 Грузонесущие, грузотолкающие или грузоведущие органы
|
|||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-03; Просмотров: 313; Нарушение авторского права страницы