|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Способы представления информации
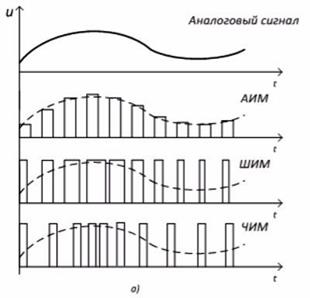
При использовании в качестве носителя информации электрических сигналов возможны две её формы: 1) аналоговая – электрический сигнал аналогичен исходному в каждый момент времени, т.е. непрерывен во времени. Температура, давление, скорость изменяются по непрерывному закону – датчики преобразуют эти величины в электрический сигнал, который изменяется по такому же закону (аналогичен). Величины, представленные в такой форме, могут принимать бесконечно много значений в каком-то диапазоне. 2) дискретная - импульсная и цифровая – сигнал представляет собой последовательность импульсов, в которых закодирована информация. При этом кодируются не все значения, а только в конкретные моменты времени – дискретизация сигнала. Импульсный режим работы - кратковременное воздействие сигнала чередуется с паузой. По сравнению с непрерывным (аналоговым), импульсный режим работы имеет ряд преимуществ: - большие значения выходной мощности на такой же объем электронного устройства и более высокий коэффициент полезного действия; - повышение помехоустойчивости, точности и надежности электронных устройств; - уменьшение влияния температур и разброса параметров приборов, так как работа осуществляется в двух режимах: «включено» - «выключено»; - реализация импульсных устройств на однотипных элементах, легко выполняемых методом интегральной технологии (на микросхемах). На рисунке 1, а представлены способы кодирования непрерывного сигнала прямоугольными импульсами – процесс модуляции. Амплитудно-импульсная модуляция (АИМ) - амплитуда импульсов пропорциональна входному сигналу. Широтно-импульсная модуляция (ШИМ) - ширина импульсов tимп пропорциональна входному сигналу, амплитуда и частота импульсов постоянны. Частотно-импульсная модуляция (ЧИМ) - входной сигнал определяет частоту следования импульсов, которые имеют постоянную длительность и амплитуду.
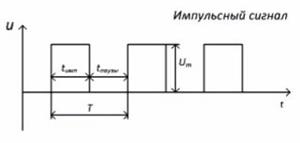
Рисунок 1 – а) Способы кодирования непрерывного сигнала прямоугольными импульсами, б) Основные параметры прямоугольных импульсов Наиболее распространены импульсы прямоугольной формы. На рисунке 1, б приведена периодическая последовательность прямоугольных импульсов и их основные параметры. Импульсы характеризуются следующими параметрами: Um - амплитуда импульса; tимп - длительность импульса; tпаузы - длительность паузы между импульсами; Tп=tи + tп - период повторения импульсов; f=1/Tп - частота повторения импульсов; QH = Tп/tи - скважность импульсов. Наряду с прямоугольными импульсами в электронной технике широко применяются импульсы пилообразной, экспоненциальной, трапециидальной и другой формы. Цифровой режим работы - информация передается в виде числа, которому соответствует определенный набор импульсов (цифровой код), при этом существенно только наличие или отсутствие импульса. Цифровые устройства чаще всего работают только с двумя значениями сигналов – нулём «0» (обычно низкий уровень напряжения или отсутствие импульса) и «1» (обычно высокий уровень напряжения или наличие прямоугольного импульса), т.е. информация представляется в двоичной системе счисления. Это обусловлено удобством создания, обработки, хранения и передачи сигналов, представленных в двоичной системе: ключ замкнут – разомкнут, транзистор открыт – закрыт, конденсатор заряжен – разряжен, магнитный материал намагничен – размагничен и т.д. Цифровая информация представляется двумя способами: 1) потенциальным - значениям «0» и «1» соответствуют низкий и высокий уровни напряжения. 2) импульсным - двоичным переменным соответствует наличие или отсутствие электрических импульсов в определённые моменты времени.
HART -протокол (Highway Addressable Remote Transducer - " магистральный адресуемый удаленный преобразователь" ) [HART] является открытым стандартом на метод сетевого обмена, который включает в себя не только протокол взаимодействия устройств, но и требования к аппаратуре канала связи, поэтому устоявшийся термин " протокол", означающий алгоритм взаимодействия устройств, применен здесь не совсем корректно. Стандарт HART был разработан в 1980 году фирмой Rosemount Inc., которая позже сделала его открытым. В настоящее время стандарт поддерживается международной организацией HART Communication Foundation (HCF), насчитывающей 190 членов (на декабрь 2006 г.). HART находит применение для связи контроллера с датчиками и измерительными преобразователями, электромагнитными клапанами, локальными контроллерами, для связи с искробезопасным оборудованием. Несмотря на свое низкое быстродействие (1200 бит/с) и ненадежный аналоговый способ передачи данных, а также появление более совершенных сетевых технологий, устройства с HART-протоколом разрабатываются до сих пор и объем этого сегмента рынка продолжает расти. Однако применение HART в России довольно ограничено, поскольку внедрение датчиков с HART-протоколом требует одновременного применения HART-совместимых контроллеров и специализированного программного обеспечения. Типовой областью применение HART являются достаточно дорогие интеллектуальные устройства (электромагнитные клапаны, датчики потока жидкости, радарные уровнемеры и т. п), а также взрывобезопасное оборудование, где низкая мощность HARTсигнала позволяет легко удовлетворить требованиям стандартов на искробезопасные электрические цепи. Принципы построения
При создании HART-протокола в 1980 году преследовалась цель сделать его совместимым с широко распространенным в то время стандартом " токовая петля", но добавить возможности, необходимые для управления интеллектуальными устройствами. Поэтому аналоговая " токовая петля" 4...20 мА была модернизирована таким образом, что получила возможность полудуплексного цифрового обмена данными. Для этого аналоговый сигнал Принцип взаимодействия устройств на физическом уровне модели OSIпоказан на рис. 2.16. Сопротивление Как и в обычной " токовой петле", источник тока в HART-устройстве может иметь внешний или встроенный источник питания.
В частном случае HART-протокол может использовать только цифровой сигнал, без аналогового, или только аналоговый сигнал 4...20 мА, без цифрового. В случае, когда ведомым устройством является не датчик, а исполнительное устройство (например электромагнитный клапан), аналоговый сигнал в форме тока должен передаваться от ведущего устройства к ведомому и источник тока должен находиться в ведущем устройстве (ситуация, обратная показанной на рис. 2.16). Поскольку HART устройства содержат микроконтроллер и МОП-ключи, необходимое для этого переконфигурирование передатчика и приемника выполняется путем подачи соответствующей команды. HART-устройства всегда содержат микроконтроллер (рис. 2.17) с UART и ППЗУ (перепрограммируемое постоянное запоминающее устройство). Цифровой сигнал, сформированный микроконтроллером, преобразуется в UARTв непрерывную последовательность бит, состоящую из двоичных слов длиной 11 бит каждое (рис. 2.18-а). Каждое слово начинается со стартового бита (логический ноль), за которым следует байт передаваемых данных, затем бит паритета и стоповый бит. Сформированная таким образом последовательность нулей и единиц передается в модем, выполняющий частотную манипуляцию (ЧМ). Полученный частотно-манипулированный сигнал передается в интерфейсный блок для формирования напряжения, подаваемого в линию связи (напомним, что от контроллера к датчику передается сигнал в форме напряжения, а обратно - в форме тока).
На стороне датчика сигнал принимается из линии интерфейсным блоком, преобразуется ЧМ модемом в последовательность битов, из которой контроллер выделяет байты данных и биты паритета. Микроконтроллер проверяет соответствие бита паритета переданному байту для каждого переданного слова, пока не обнаружит признак конца сообщения. Получив команду, контроллер приступает к ее выполнению. Если пришла команда запроса измеренных данных, контроллер датчика принимает через АЦП сигнал датчика, преобразует его в аналоговую форму с помощью ЦАП, суммирует со служебной информацией на выходе ЧМ модема и передает в линию связи в форме тока 4...20 мА (рис. 2.17).
Интерфейсы RS -485 и RS -422 описаны в стандартах ANSI EIA/TIA*-485-А и EIA/TIA-422. Интерфейс RS-485 является наиболее распространенным в промышленной автоматизации. Его используют промышленные сети Modbus, Profibus DP, ARCNET, BitBus, WorldFip, LON, Interbus и множество нестандартных сетей. Связано это с тем, что по всем основным показателям данный интерфейс является наилучшим из всех возможных при современном уровне развития технологии. Основными его достоинствами являются: o двусторонний обмен данными всего по одной витой паре проводов; o работа с несколькими трансиверами, подключенными к одной и той же линии, т. е. возможность организации сети; o большая длина линии связи; o достаточно высокая скорость передачи.
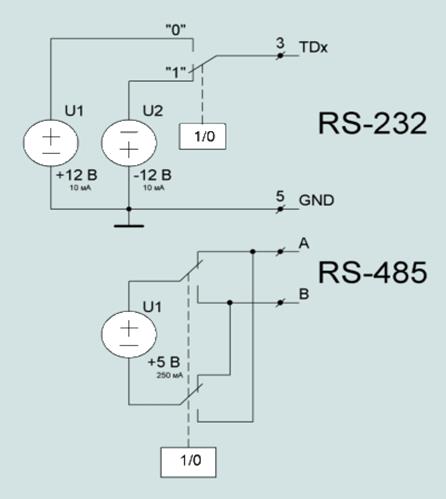
Формирование сигналов RS-485 и RS-232
RS232 - популярный протокол, применяемый для связи компьютеров с модемами и другими периферийными устройствами. RS-232 - интерфейс передачи информации между двумя устройствами на расстоянии до 20 м. Информация передается по проводам с уровнями сигналов, отличающимися от стандартных 5В, для обеспечения большей устойчивости к помехам. Асинхронная передача данных осуществляется с установленной скоростью при синхронизации уровнем сигнала стартового импульса. Назначение RS-232 Интерфейс RS-232-C был разработан для простого применения, однозначно определяемого по его названию " Интерфейс между терминальным оборудованием и связным оборудованием с обменом по последовательному двоичному коду". В 232 используются два уровня сигналов: логические 1 и 0. Логическую 1 иногда обозначают MARK, логический 0 - SPACE. Логической 1 соответствуют отрицательные уровни напряжения, а логическому 0 - положительные. Соответствующие значения напряжений представлены в таблице. Уровни сигналов данных
Протокол связи RS-485 является наиболее широко используемым промышленным стандартом, использующим двунаправленную сбалансированную линию передачи. Протокол поддерживает многоточечные соединения, обеспечивая создание сетей с количеством узлов до 32 и передачу на расстояние до 1200 м. Использование повторителей RS-485 позволяет увеличить расстояние передачи еще на 1200 м или добавить еще 32 узла.
Преимущества физического сигнала RS-485 перед сигналом RS-232 Используется однополярный источник питания +5В, который используется для питания большинства электронных приборов и микросхем. Это упрощает конструкцию и облегчает согласование устройств. Мощность сигнала передатчика RS-485 в 10 раз превосходит мощность сигнала передатчика RS-232. Это позволяет подключать к одному передатчику RS-485 до 32 приёмников и таким образом вести широковещательную передачу данных. Использование симметричных сигналов, у которой имеется гальваническая развязка с нулевым потенциалом питающей сети. В результате исключено попадание помехи по нулевому проводу питания (как в RS-232). Учитывая возможность работы передатчика на низкоомную нагрузку, становится возможным использовать эффект подавления синфазных помех с помощью свойств " витой пары". Это существенно увеличивает дальность связи. Кроме этого появляется возможность " горячего" подключения прибора к линии связи (хотя это не предусмотрено стандартом RS-485). Заметим что в RS-232 " горячее" подключение прибора обычно приводит к выходу из строя СОМ порта компьютера. Описание обмена данными по стандарту RS-485:
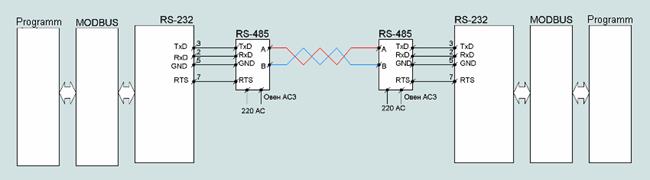
Каждый приёмопередатчик (драйвер) RS-485 может находиться в одном из двух состояний: передача данных или приём данных. Переключение драйвера RS-485 происходит с помощью специального сигнала. Например, на рис.3 показан обмен данными с использованием преобразователя АС3 фирмы Овен. Режим преобразователя переключается сигналом RTS. Если RTS=1 (True) АС3 передает данные, которые поступают к нему от СОМ порта в сеть RS-485. При этом все остальные драйверы должны находиться в режиме приёма (RTS=0). По сути дела RS-485 является двунаправленным буферным мультиплексированным усилителем для сигналов RS-232.
Рис.3 Пример использования преобразователя Овен АС3.
RS485 Ситуация когда в одно время будет работать более одного драйвера RS-485 в режиме передатчика приводит к потере данных. Эта ситуация называется " коллизией". Чтобы коллизии не возникали в каналах обмена данными необходимо использовать более высокие протоколы (OSI). Такие как MODBUS, DCON, DH485 и др. Либо программы, которые напрямую работают с RS-232 и решают проблемы коллизий. Обычно эти протоколы называют 485-тыми протоколами. Хотя на самом деле, аппаратной основой всех этих протоколов служит, конечно, RS-232. Он обеспечивает аппаратную обработку всего потока информации. Программную обработку потока данных и решение проблем с коллизиями занимаются протоколы высшего уровня (Modbus и др.) и ПО.
|
|||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-06-08; Просмотров: 324; Нарушение авторского права страницы
 суммируется с цифровым сигналом
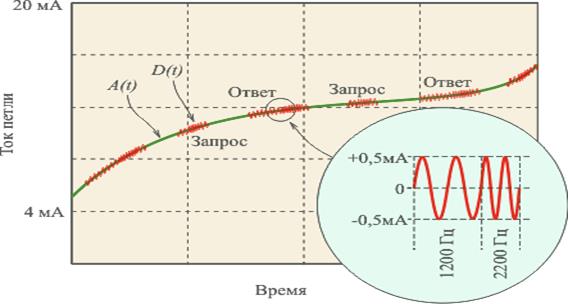
суммируется с цифровым сигналом  (рис. 2.15) и полученная таким образом сумма передается с помощью источника тока 4...20 мА по линии связи. Благодаря сильному различию диапазонов частот аналогового (0...10 Гц) и цифрового (1200 Гц и 2200 Гц) сигналов они легко могут быть разделены фильтрами низких и высоких частот в приемом устройстве. При передаче цифрового двоичного сигнала логическая единица кодируется синусоидальным сигналом с частотой 1200 Гц, ноль - 2200 Гц. При смене частоты фаза колебаний остается непрерывной. Такой способ формирования сигнала называется частотной манипуляцией с непрерывной фазой. Выбор частот соответствует американскому стандарту BELL 202 на телефонные каналы связи.
(рис. 2.15) и полученная таким образом сумма передается с помощью источника тока 4...20 мА по линии связи. Благодаря сильному различию диапазонов частот аналогового (0...10 Гц) и цифрового (1200 Гц и 2200 Гц) сигналов они легко могут быть разделены фильтрами низких и высоких частот в приемом устройстве. При передаче цифрового двоичного сигнала логическая единица кодируется синусоидальным сигналом с частотой 1200 Гц, ноль - 2200 Гц. При смене частоты фаза колебаний остается непрерывной. Такой способ формирования сигнала называется частотной манипуляцией с непрерывной фазой. Выбор частот соответствует американскому стандарту BELL 202 на телефонные каналы связи. выбирается так же, как и в токовой петле (стандартом предусмотрена величина 230...1100 Ом) и служит для преобразования тока 4...20 мА в напряжение. Акт взаимодействия устройств инициирует контроллер. Цифровой сигнал от источника напряжения
выбирается так же, как и в токовой петле (стандартом предусмотрена величина 230...1100 Ом) и служит для преобразования тока 4...20 мА в напряжение. Акт взаимодействия устройств инициирует контроллер. Цифровой сигнал от источника напряжения  через конденсатор
через конденсатор  подается в линию передачи и принимается на стороне датчика в форме напряжения в диапазоне от 400 до 800 мВ. Приемник датчика воспринимает HART-сигналы в диапазоне от 120 мВ до 2 В, сигналы от 0 до 80 мВ приемником игнорируются. Получив запрос, датчик формирует ответ, который в общем случае может содержать как аналоговый сигнал
подается в линию передачи и принимается на стороне датчика в форме напряжения в диапазоне от 400 до 800 мВ. Приемник датчика воспринимает HART-сигналы в диапазоне от 120 мВ до 2 В, сигналы от 0 до 80 мВ приемником игнорируются. Получив запрос, датчик формирует ответ, который в общем случае может содержать как аналоговый сигнал  , так и цифровой (
, так и цифровой (  ). Аналоговый сигнал обычно содержит информацию об измеренной величине, а цифровой - информацию о единицах и диапазоне измерения, о выходе величины за границы динамического диапазона, о типе датчика, имени изготовителя и т. п.). Аналоговый и цифровой сигнал суммируются и подаются в линию связи в форме тока (рис. 2.15, рис. 2.16). На стороне контроллера ток преобразуется в напряжение резистором
). Аналоговый сигнал обычно содержит информацию об измеренной величине, а цифровой - информацию о единицах и диапазоне измерения, о выходе величины за границы динамического диапазона, о типе датчика, имени изготовителя и т. п.). Аналоговый и цифровой сигнал суммируются и подаются в линию связи в форме тока (рис. 2.15, рис. 2.16). На стороне контроллера ток преобразуется в напряжение резистором 

 а)
а)
 б)
б)