|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение скоростей и ускорений точек телаСтр 1 из 2Следующая ⇒
ПЛОСКОЕ ДВИЖЕНИЕ ТЕЛА
Движение твердого тела называется плоским, если все точки тела перемещаются в плоскостях, параллельных некоторой неподвижной плоскости. Примером плоского движения тела может служить качение цилиндра по горизонтальной плоскости, когда все точки тела перемещаются в плоскостях, параллельных плоскости ху. Итак, задание движения твердого тела сводится к заданию движения одного его сечения. Поэтому в дальнейшем будем изображать только плоскую фигуру – сечение тела и изучать движение точек этого сечения в его плоскости. Таким образом, для описания плоского движения тела требуется знать три независимые координаты как функции времени:
которые и определяют положение плоской фигуры в любой момент времени. Эти равенства называются уравнениями движения плоской фигуры или уравнениями плоского движения твердого тела, а задать движение твердого тела означает задать эти зависимости [1,4].
1.1 Векторная форма задания плоского движения тела
Положение любой другой точки тела М в неподвижной системе координат определяется как геометрическая сумма радиус-вектора полюса и радиус-вектора, проведенного из полюса в заданную точку. За полюс следует брать точку, закон движения которой очевиден, например точку А (рис.1.1):
В дальнейшем, для удобства, не следует указывать, что переменная, например, ra есть вектор, но обязательно необходимо выразить эту переменную в векторной форме, т. е. присвоить трем элементам вектора-столбца соответствующие значения его проекций на оси декартовой системы координат. Если хотя бы одна проекция вектора со временем изменяется, то при присвоении имени переменной необходимо записать – ra(t), т.е. определить вектор в функции времени.
Радиус-вектор r это вектор по модулю равный расстоянию между полюсом и точкой М, но направление его изменяется со временем, поэтому необходимо задать закон изменения проекций этого вектора и записать r(t), несмотря на то, что по модулю он неизменен. Следует отметить, что при неизменном положении полюса задача сводится к вращательному движению тела вокруг неподвижной оси. Если во время движения тела его угловое положение не изменяется, то имеет место поступательное движение (пример, движение спарника). Использование векторной формы задания движения и системы Mathcad позволяет рассчитать и наглядно представить положение любой точки в любой момент времени, а также построить траектории движущихся точек, но для этого в алгоритм расчета необходимо ввести значения параметров движущегося тела, а также задать временной интервал исследования и значения переменной t.
Алгоритм расчета и построения траекторий движения точек (на примере плоскопараллельного движения колеса) должен быть представлен в том виде, в каком его можно реализовать системой Mathcad. Здесь и ниже выделена рамкой особенность представления алгоритма в Mathcad.
Для построения траектории точки М в графическом редакторе Mathcad достаточно вызвать двухмерный график и отложить по горизонтальной оси проекцию вектора с индексом 0 – rm(t)0, это нулевой элемент вектора, а по вертикальной оси rm(t)1 – первый элемент вектора. Контур точки М в конкретный момент времени – t1 можно показать, если на осях отложить: rm(t1)0 и rm(t1)1. Контур точки А в начальный момент времени: rа(0)0 и rа(0)1 [2,3,5]. Для создания контура колеса необходимо ввести новый вектор – Кk(t), как сумму двух векторов: вектора заданного положения точки А и вектора r(t), изменяющегося по направлению на угол 2p, как показано выше в алгоритме, а затем на графике вызвать проекции этого вектора на оси: Кk(t)0 и Кk(t)1 (рис. 1.2).
При плоском движении
Продифференцировав по времени закон движения точки, найдем
Заметим, что
где ωA – угловая скорость вращения фигуры вокруг точки А, не зависящая от выбора полюса, и должна быть представлена, как и r(t), в векторной форме:
Формула закона движения принимает вид:
т. е. скорость любой точки М плоской фигуры равна геометрической сумме скоростей полюса А и точки М при вращении ее вокруг полюса А. Направление вращения плоской фигуры вокруг полюса определяет знак проекции угловой скорости на ось Az2. При вращении тела против хода часовой стрелки ωZ > 0, при вращении по ходу часовой стрелки – ωZ < 0. Для определения ускорения точки плоской фигуры продифференцируем предыдущее равенство по времени:
В этом соотношении
Угловое ускорения тела ε, как и линейное ускорение точки А, должны быть представлены также в векторной форме. Таким образом, ускорение точек А и М связаны между собой соотношением
Два последних слагаемых определяют центростремительную и вращательную составляющие ускорения точки М во вращательном движении относительно системы координат Ax2y2:
Таким образом, ускорение любой точки М плоской фигуры равно геометрической сумме ускорения полюса и ускорений во вращательном движении фигуры относительно полюса (центростремительного и вращательного). В Mathcad
Использование векторной формы задания движения и системы Mathcad позволяет рассчитать и наглядно представить значения скорости и ускорения любой точки или их проекций на оси координат в любой момент времени в виде графиков или таблиц. Ниже, на примере кривошипно-шатунного механизма с колесом на конце шатуна (рис.1.3), рассмотрен алгоритм расчета скоростей и ускорений точек тел при их плоском движении. Кривошип ОА вращается с угловой скоростью w. Шатун 2 соединяет кривошип с колесом 3 в точке В (как показано на рисунке). В алгоритме расчета кинематических параметров механизма с использованием Mathcad необходимо задать исходные данные механизма, а также временной интервал исследования переменной t.
Пример создания анимационного клипа в системе MathCAD Варианты заданий по теме «Плоскопараллельное движение тел» Цель: освоить нетрадиционные методы решения задач плоскопараллельного движения тел с использованием численных методов и графики, в том числе анимационной, для решения и наглядного представления кинематики движения тел. В табл. 1.1 представлены две блок – схемы, из которых необходимо собрать систему тел. В табл. 1.2 дано их по вариантное сочленение. Направляющую для системы колес следует выбрать на уровне оси Х (варианты 1 – 8), выше оси Х (на высоте h= R4) – для вариантов 9 – 16 и ниже оси Х (h= R4) – для вариантов 17 – 32. Геометрические размеры всех тел механизма выбираются произвольно (по конструктивным соображениям). Угловая скорость ведущего звена – постоянна.
Таблица 1.1 Блок-схемы составной конструкции механизма
Продолжение таблицы 1.1 Окончание таблицы 1.1
На рисунках 13 – 15 – приведены примеры системы тел.
Таблица 1.2 Варианты к выбору составной конструкции тел
Окончание таблицы 1.2 Пример отчета по практической работе « Плоское движение»
Исследуем кинематику механизма, составленного из двух блок – схем 1 и 2, соединенных между собой шарниром в точке С, как показано на рис. 1.8. Линейка АВ, шарнирно установленная на ползунах, вращается относительно оси Z1 с угловой скоростью w. Шатун соединяет точку С линейки с системой колес 3 и 4. Размеры тел и звеньев зададим по конструктивным соображениям.
Движения тел
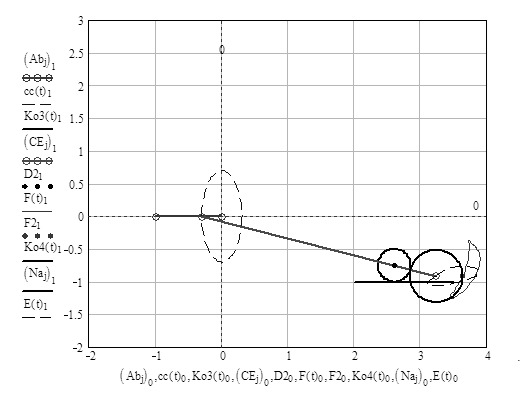
Результаты исследования плоскопараллельного движения тел Вызвав графический редактор системы Mathcad, создадим визуальное представление траекторий движения всех точек механизма. Видео клип, созданный в графическом редакторе системы Mathcad, сохраним в виде отдельного файла, присвоив ему имя. Создав в документе «знак видео клипа», и оформив его как гиперссылку на файл видео клипа, можно «щелкнуть» по этому знаку и выполнить визуальный анализ механизма в движении.
Рис. 1.9 Создание контуров тел механизма траекторий движения точек как объектов анимации в графическом и редакторе системы Mathcad
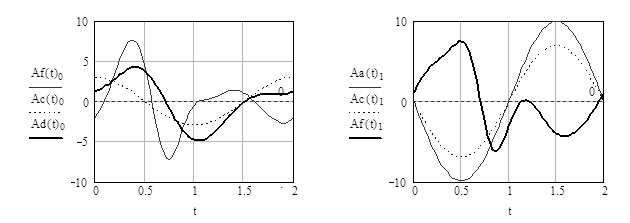
Закономерности изменения скоростей и ускорений точек механизма можно представить, как по абсолютной величине, так и в проекциях на оси координат в функции времени. Ниже представлена графическая визуализация закономерности изменения скоростей и ускорений точек механизма или их проекций на координатные оси, реализованная в графическом редакторе системы Mathcad.
Рис. 1.10 Изменение линейных скоростей точек механизма
Рис. 1.11 Изменение линейных скоростей и ускорений точек механизма
ПЛОСКОЕ ДВИЖЕНИЕ ТЕЛА
Движение твердого тела называется плоским, если все точки тела перемещаются в плоскостях, параллельных некоторой неподвижной плоскости. Примером плоского движения тела может служить качение цилиндра по горизонтальной плоскости, когда все точки тела перемещаются в плоскостях, параллельных плоскости ху. Итак, задание движения твердого тела сводится к заданию движения одного его сечения. Поэтому в дальнейшем будем изображать только плоскую фигуру – сечение тела и изучать движение точек этого сечения в его плоскости. Таким образом, для описания плоского движения тела требуется знать три независимые координаты как функции времени:
которые и определяют положение плоской фигуры в любой момент времени. Эти равенства называются уравнениями движения плоской фигуры или уравнениями плоского движения твердого тела, а задать движение твердого тела означает задать эти зависимости [1,4].
1.1 Векторная форма задания плоского движения тела
Положение любой другой точки тела М в неподвижной системе координат определяется как геометрическая сумма радиус-вектора полюса и радиус-вектора, проведенного из полюса в заданную точку. За полюс следует брать точку, закон движения которой очевиден, например точку А (рис.1.1):
В дальнейшем, для удобства, не следует указывать, что переменная, например, ra есть вектор, но обязательно необходимо выразить эту переменную в векторной форме, т. е. присвоить трем элементам вектора-столбца соответствующие значения его проекций на оси декартовой системы координат. Если хотя бы одна проекция вектора со временем изменяется, то при присвоении имени переменной необходимо записать – ra(t), т.е. определить вектор в функции времени.
Радиус-вектор r это вектор по модулю равный расстоянию между полюсом и точкой М, но направление его изменяется со временем, поэтому необходимо задать закон изменения проекций этого вектора и записать r(t), несмотря на то, что по модулю он неизменен. Следует отметить, что при неизменном положении полюса задача сводится к вращательному движению тела вокруг неподвижной оси. Если во время движения тела его угловое положение не изменяется, то имеет место поступательное движение (пример, движение спарника). Использование векторной формы задания движения и системы Mathcad позволяет рассчитать и наглядно представить положение любой точки в любой момент времени, а также построить траектории движущихся точек, но для этого в алгоритм расчета необходимо ввести значения параметров движущегося тела, а также задать временной интервал исследования и значения переменной t.
Алгоритм расчета и построения траекторий движения точек (на примере плоскопараллельного движения колеса) должен быть представлен в том виде, в каком его можно реализовать системой Mathcad. Здесь и ниже выделена рамкой особенность представления алгоритма в Mathcad.
Для построения траектории точки М в графическом редакторе Mathcad достаточно вызвать двухмерный график и отложить по горизонтальной оси проекцию вектора с индексом 0 – rm(t)0, это нулевой элемент вектора, а по вертикальной оси rm(t)1 – первый элемент вектора. Контур точки М в конкретный момент времени – t1 можно показать, если на осях отложить: rm(t1)0 и rm(t1)1. Контур точки А в начальный момент времени: rа(0)0 и rа(0)1 [2,3,5]. Для создания контура колеса необходимо ввести новый вектор – Кk(t), как сумму двух векторов: вектора заданного положения точки А и вектора r(t), изменяющегося по направлению на угол 2p, как показано выше в алгоритме, а затем на графике вызвать проекции этого вектора на оси: Кk(t)0 и Кk(t)1 (рис. 1.2).
Определение скоростей и ускорений точек тела При плоском движении
Продифференцировав по времени закон движения точки, найдем
Заметим, что
где ωA – угловая скорость вращения фигуры вокруг точки А, не зависящая от выбора полюса, и должна быть представлена, как и r(t), в векторной форме:
Формула закона движения принимает вид:
т. е. скорость любой точки М плоской фигуры равна геометрической сумме скоростей полюса А и точки М при вращении ее вокруг полюса А. Направление вращения плоской фигуры вокруг полюса определяет знак проекции угловой скорости на ось Az2. При вращении тела против хода часовой стрелки ωZ > 0, при вращении по ходу часовой стрелки – ωZ < 0. Для определения ускорения точки плоской фигуры продифференцируем предыдущее равенство по времени:
В этом соотношении
Угловое ускорения тела ε, как и линейное ускорение точки А, должны быть представлены также в векторной форме. Таким образом, ускорение точек А и М связаны между собой соотношением
Два последних слагаемых определяют центростремительную и вращательную составляющие ускорения точки М во вращательном движении относительно системы координат Ax2y2:
Таким образом, ускорение любой точки М плоской фигуры равно геометрической сумме ускорения полюса и ускорений во вращательном движении фигуры относительно полюса (центростремительного и вращательного). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-06-10; Просмотров: 148; Нарушение авторского права страницы
 .
.
 Рис. 1.1 Схема к задаче «Колесо»
Рис. 1.1 Схема к задаче «Колесо»


 Рис. 1.2 Визуализация решения задачи «Колесо»
Рис. 1.2 Визуализация решения задачи «Колесо»

 ,
,  . Что касается
. Что касается  , то это есть скорость точки М в подвижной системе координат Ах2у2, т. е. скорость точки М при ее относительном вращении вокруг оси Аz2, т. е.
, то это есть скорость точки М в подвижной системе координат Ах2у2, т. е. скорость точки М при ее относительном вращении вокруг оси Аz2, т. е. ,
,

 ,
,
 .
.
 – ускорение точки А,
– ускорение точки А,  – проекция вектора углового ускорения на ось, перпендикулярную плоскости фигуры:
– проекция вектора углового ускорения на ось, перпендикулярную плоскости фигуры:
 .
.
 .
.
 Рис. 1.3 Плоское движение тел механизма
Рис. 1.3 Плоское движение тел механизма



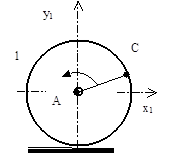

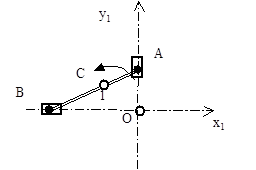




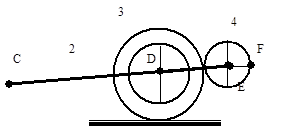
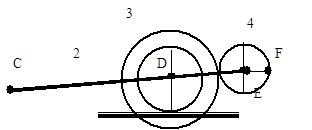
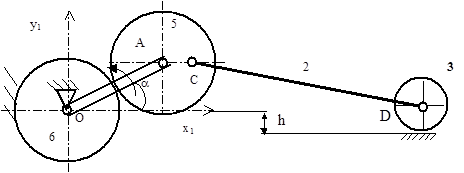
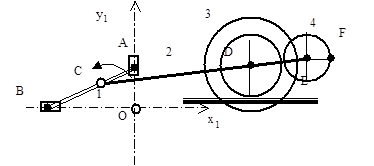

 Рис. 1.8 Схема расчетного механизма
Рис. 1.8 Схема расчетного механизма