|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Разработка схемы электропривода ⇐ ПредыдущаяСтр 2 из 2
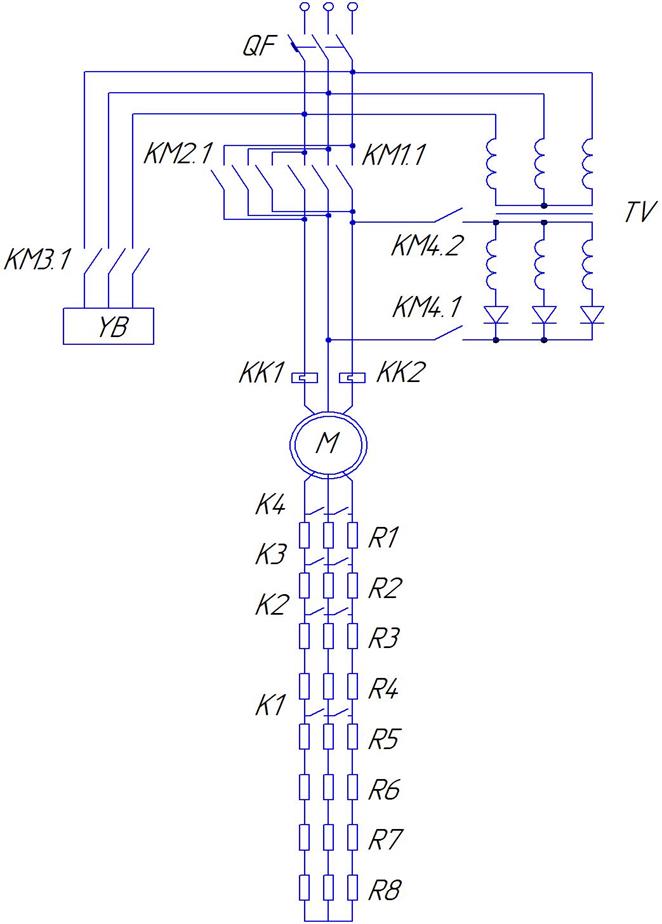
Описание схемы: Силовая схема привода включает: асинхронный двигатель М с фазным ротором, электрогидравлический толкатель YB (привод механического тормоза закрытого типа), контакторы КМ1, КМ2, КМ3, KM4 и ступени резисторов R1-R14, включенные в цепь ротора, тепловые реле КК1 и KK2, автоматический воздушный выключатель QF. При замыкании автоматического воздушного выключателя QF в силовой цепи ничего не происходит, а цепь управления получает питание. К катушке реле напряжения KV подводится напряжение и контакт KV1.1 замыкается. Реле времени KT1-KT4 получают питание и размыкают мгновенно свои контакты KT1.1-KT4.1. Цепь управления готова к работе. При переводе рукоятки командоконтроллера из положения 0 в положение 1 подъема, контакт KV1.1 остается замкнутым, получают питание обмотки магнитного пускателя КМ1 и KM3. В результате этого контакты КМ1.1 в силовой цепи двигателя и контакты KM3.1 в цепи тормоза замкнутся. Электрогидравлический толкатель тормоза YB получает питание и происходит растормаживание вала двигателя. Силовые контакты контакторов К1-K4 остаются разомкнутыми и двигатель М начинает работу на самой мягкой искусственной характеристике с полностью введенными сопротивлениями R. Также происходит размыкание контакта KM1.2 и катушка реле времени KT1 теряет питание и замыкает с выдержкой времени свои контакты KT1.1. При переводе рукоятки командоконтроллера в положение 2 подъема обмотки KM1и KM3 остаются под напряжение и двигатель работает в том же направлении. Контакт KT1.1 реле времени KT1 замыкается с выдержкой времени, катушка K1 получает питание и замыкаются контакты K1 в цепи ротора и размыкаются контакты K1.2 в цепи управления, выводятся ступени сопротивлений R5-R14 и двигатель переходит на работу по более жесткой искусственной характеристики с большей скоростью, реле времени KT2 теряет питание. При переводе рукоятки командоконтроллера в положение 3 подъема контакт реле времени KT2 замыкается с выдержкой времени, обмотка K2 получает питание, в цепи ротора замыкаются контакты K2, выводятся ступени сопротивлений R3-R14, скорость двигателя увеличивается, размыкаются контакты K2.2 в цепи управления и теряет питание обмотка KT3. Аналогична работа схемы в положениях 4 и 5. После выведения всех сопротивлений двигатель выходит на естественную характеристику. В положении 1 спуска, двигатель работает в режиме динамического торможения, в силовой цепи замкнуты контакты KM4.1 и KM4.2. В 1 положение в цепи ротора введено минимальное сопротивление, что обеспечивает максимальный тормозной момент. В положениях 2-5 спуска двигатель работает аналогично положениям 2-5 подъема, с той лишь разницей, что в силовой цепи замкнуты контакты KM2. При приближении к поверхности, для обеспечения посадочной скорости, рукоятка переводится в 1 положение КМ, в котором двигатель работает в динамическом торможении с максимальным тормозным моментом. Также в этом положении облегчается работа механических тормозов, так как постоянное магнитное поле статора подтормаживает вал двигателя. В случае, полного исчезновения напряжения питания или если оно становится меньше уставки реле минимального напряжения KV, последнее срабатывает и размыкает свои контакты KV1.1 обесточивая всю схему управления. Механизм затормаживается механическим тормозом (нулевая защита). В случае восстановления напряжения самопроизвольного запуска двигателя не произойдет. Для его включения оператору необходимо перевести рукоятку командоконтроллера в нулевое положение (нулевая блокировка). Нулевая защита и нулевая блокировка имеются во всех крановых приводах. Тепловое реле КК обеспечивает защиту двигателя от перегрузки.
Рис.6.1.Схема электропривода механизма подъема
Рис.6.2. Схема управления ЗАКЛЮЧЕНИЕ В данной курсовой работе был разработан ЭП механизма подъема крана. Были получены и закреплены теоретические знания при изучении требований к крановым приводам. Получены навыки самостоятельной работы с учебной и справочной литературой при выборе и разработке схемы ЭП.
Список ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ И литературы 1. Полянский В. Ф., Попов А. В. Электрооборудование судов и предприятий. – М.: Транспорт, 1989. – 214 с. 2. Электроприводы портальных и плавучих кранов. Требования к расчёту и проектированию. РТМ 212.0050 – 84. – Л.: Транспорт, 1985. – 47 с. 3. Правила технической эксплуатации и ремонта портовых перегрузочных машин. – Л.: Транспорт. 1986. – 206 с. 4. Кудакин А. В., Шир В. М. Электрооборудование подъёмно-транспортных машин. – М.: Транспорт, 1993. – 311 с. 5. Правила устройства и безопасной эксплуатации грузоподъёмных кранов. – М.: Металлургия, 1996. – 124 с. 6. Крановое электрооборудование: Справочник под ред. Рабиновича А.А. – М.: Энергоиздат, 1979. – 164с. 7. Яуре А.Г., Певзнер Е.М. Крановый электропривод: Справочник. – М.: Энергоатомиздат, 1988. – 344 с. 8. Игловский И.Г., Владимиров Г.В. Справочник по слаботочным электрическим реле. 3-е изд. перераб. И доп. – Л.: Энергоатомиздат, 1998. – 560 с. 9. Конопелько О.К. Методические указания по схемам электроприводов береговых установок. – Новосибирск: НИИВТ, 1981. – 67 с. 10. Конопелько О.К., Маркс С.Л., Овсянников А.С. Электрооборудование и автоматизация береговых установок / Методические указания к курсовому проектированию для студентов специальности 0628 «Электропривод и автоматизация промышленных установок» дневной и заочной форм обучения. Кафедра ЭОСиБС. – Новосибирск: НИИВТ, 1997. – 57 с.
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 90; Нарушение авторского права страницы