
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор рационального способа кодирования сообщенийСтр 1 из 5Следующая ⇒
Введение
С увеличением расстояния передачи, объёма информации и числа контролируемых объектов особое значение приобретает необходимость сокращения затрат на линии связи, обеспечения качества передачи сигналов и быстродействия системы передачи. Эти проблемы решаются с помощью устройств автоматики и телемеханики, позволяющие наиболее рационально использовать линии связи и одновременно обеспечить надежную, быструю и точную передачу приказов, сигналов и результатов измерений. Автоматика - техника управления и контроля в пределах небольших расстоянии. Телемеханика - техника управления, контроля и регулирования производственными или технологическими процессами при наличии больших расстояний, для преодоления которых применяют специальные средства. Первый опытный телемеханизированный участок Москва-Раменское был введен в эксплуатацию в 1952 г. До 1959 г. Система телемеханики была внедрена на ряде электрифицированных участков железных дорог протяженностью около тысячи километров. В данном курсовом проекте рассматривается автоматизированная система телемеханического управления АСТМУ-А, применяемая на электрифицированных железных дорогах. Данная система телемеханики разрабатывалась при заданных ресурсных ограничениях с учетом тенденции применения современных коммуникационных технологий в системах управления и мониторинга, как железных дорог, так и электроэнергетики. Создана первичная магистральная цифровая сеть связи и первичная сеть связи технологического (дорожного) сегмента, содержащая около четырех тысяч узлов ОТН, которая закрыта от несанкционированного доступа и обеспечивает работу в режиме реального времени устройств автоматики и телемеханики, и центров диспетчерского управления. СПД ОТН обеспечивает функционирование информационно-управляющей системы контроля и управления объектами электроснабжения и контактной сети. На базе первичных сетей созданы вторичные сети, обеспечивающие оперативно-технологическую связь ОТС (включая диспетчерскую связь), общетехнологическую телефонную связь ОбТС, сеть передачи данных СПД. Отдельно выделена сеть передачи данных оперативно-технологического назначения СПД Исходные данные
Вариант 044
Особенности системы АСТМУ-А
Система АСТМУ-А выполнена на современной микропроцессорной элементной базе и обладает рядом преимуществ по сравнению с системами предыдущих поколений. Оборудование диспетчерской (верхнего уровня управления) состоит из нескольких персональных компьютеров, объединенных в локальную сеть и выполняющих роль операторской станции. Один из компьютеров подключен через узел связи к линии связи с контролируемыми пунктами. На контролируемых пунктах к каналам телемеханического управления и контроля могут подключаться либо шкафы КП-М (ПС), КП-Б (ТП) при традиционном оборудовании подстанций, либо центральные компьютеры (через узлы связи) для подстанций и постов секционирования нового поколения. В структурной схеме АСТМУ-А на рис.2 показано подключение трех КП различного типа. Число КП, подключаемых к одному ПУ (энергодиспетчерскому кругу), ограничивается допустимым временем обновления информации ТС, видом предоставляемой линии связи (проводная,, оптоволокно, радиоканал), величиной информационной нагрузки на диспетчера при организации ремонтных работ.
Рис.2. Структурная схема АСТМУ-А
КП-1 представляет подстанцию, присоединения которой оборудованы современными терминалами управлении. Это могут быть микропроцессорные блоки релейной защиты БМРЗ, ЦЗА или специализированные контроллеры. Управление терминалами и контроллерами осуществляется через центральный компьютер подстанции, который связан с контроллерами нижнего уровня по интерфейсу RS-485. Операторское управление оборудованием может осуществляться с верхнего уровня управления через модем от ПУ или от операторской станции, размещаемой на подстанции и подключенной по интерфейсу RS-232. КП-2 представляет собой контролируемый пункт с малым числом объектов, оснащенных схемами управления, выполненных на релейной элементной базе. Для таких пунктов предназначен шкаф КП-М (ПС). КП-3 представляет контролируемый пункт с большим числом объектов, имеющих традиционное управление, - для них предназначен шкаф КП-Б (ТП).
Интерфейсы и протоколы
Построение систем телемеханики тяговых подстанций в настоящее время осуществляют в тесной связи с системой автоматического управления. В таких случаях может применяться аппаратура, обслуживающая обе системы и использующая общую информацию. Для минимизации затрат на создание систем важную роль играет стандартизация как отдельных элементов систем, так и способов обмена информации в системе [1]. Коммуникационная технология построения единой информационной сети, объединяющей интеллектуальные контроллеры, датчики и исполнительные устройства, определяется одним термином - fieldbus (полевая шина или промышленная сеть). Fieldbus - это, главным образом, применяемый протокол взаимодействия устройств с учетом используемых интерфейсов. На рынке предлагается около 50 различных видов промышленных сетей, среди них: CAN, Modbus, Profibus, LonWorks, ШС 870-5. Используется множество интерфейсов: RS-232, RS-422A, RS-423A, RS-485, токовая петля (Current Loop), USB. Ниже рассмотрены интерфейсы и протоколы, применяемые в АСТМУ-А
Протокол MODBUS
Общие сведения. Протокол передачи - формализованный" набор правил, полностью определяющий порядок взаимодействия устройств или процессов друг с другом. Протокол определяется перечнем передаваемых сигналов, процедурой обмена этими сигналами, форматами сигналов и правилами кодирования каждого поля формата. В данном курсовом проекте рассмотрим протокол Modbus RTU, который применяется в системе АСТМУ-А. Этот режим поддерживает требования стандарта ШС 870-5 (уровень 2, канальный). Для передачи данных интерфейс не определен, обычно используются RS-232C, RS-422, RS-485 или токовая петля 20 мА. В АСТМУ-А токовая петля не используется. Данный протокол определяет требования к канальному (второму) и прикладному (седьмому) уровню модели OSI. Протокол предполагает в линии одно активное (ведущее, запрашивающее, главное) устройство Master, которое может обращаться к нескольким пассивным (подчиненным) устройствам Slave по их адресу. Синтаксис команд протокола позволяет адресовать 247 устройств. Инициатива проведения обмена всегда исходит от ведущего устройства. Ведомые устройства прослушивают линию связи. Master подает запрос на линию и переходит в состояние прослушивания линии связи. Ведомое устройство отвечает на запрос, пришедший в его адрес. Окончание ответной посылки Master определяет, вычисляя временные интервалы между окончанием приема предыдущего байта и началом приема следующего. Если этот интервал превысил время, необходимое для приема двух байт на заданной скорости передачи, прием кадра ответа считается завершенным.
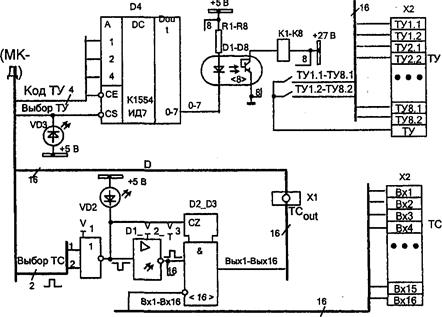
Обработка ошибок. Различают коммуникационные ошибки (связанные с искажениями при передаче данных) и логические (недопустимое значение запроса). Master после посылки сообщения ожидает ответ в установленном интервале времени. Если Slave обнаружит коммуникационную ошибку в адресованном ему сообщении или не может ответить, то он промолчит, и Master по истечении установленного интервала (тайм-аута) фиксирует ситуацию как ошибочную. Проверка на ошибку производится приемником в пределах каждого байта (символа) по четности, в пределах кадра - по CRC. В протоколе Modbus используется следующая диалоговая процедура. 1. Если Slave принимает корректный запрос и может его нормально обработать, то возвращает нормальный ответ, в котором адрес и номер функции совпадает с принятыми от устройства Master. 2. Если Slave не принимает какого-либо значения, никакого ответа не отправляется. Master диагностирует ошибку по тайм-ауту. 3. Если Slave принимает запрос, но обнаруживает ошибку (паритет, CRC), никакого ответа не отправляется. Master диагностирует ошибку по тайм-ауту. 4. Если Slave принимает запрос, но не может его обработать, отправляется ответ, содержащий в области данных сведения об ошибке. Кроме того, старший бит кода команды в ответе устанавливается в единицу. Рис.14. Функциональная схема шкафа КП-Б (ТП)
Последовательные интерфейсы контроллера МК-Д канала телеизмерений RS-485 (И) и канала управления RS-485 (У) выведены соответственно на панели соединительных зажимов XI1 и Х12. Период просмотра и регистрации сигналов ТС составляет 8 мс. Цифровая информация о значениях сигналов ТИ через последовательный интерфейс RS-422 поступает в контроллер МК-Д. Интерфейс RS-422 параллельно выведен также на соединитель XI1 для обеспечения возможности подключения внешних блоков измерения. Период обновления информации о значениях сигналов ТИ по всем каналам телеизмерений шкафа КП-Б (ТП) составляет примерно 1 секунду. Контроллер МК-Д Контроллер запрограммирован на максимальное число принимаемых модулем сигналов: ТС - 256, ТУ - 128, ТИ - 112; фактическое число сигналов определяется схемой шкафов КП-М (ПС) и КП-Б (ТП). На лицевую панель контроллера МК-Д выведены светодиодные индикаторы, индицирующие: работу приемника и передатчика SPI-интерфейса - SI и SO; работу приемника и передатчика интерфейсов RS-232 и RS-485 канала управления - RX и ТХ; работу приемника и передатчика интерфейса RS-422/RS-485 канала расширения системы - RSI и TSI; команду ТУ в двоичном коде - КОД_ТУ (разряды 8, 4, 2, 1); команду ТУ - " включить" - ВКЛ; команду ТУ - " отключить" - ОТКЛ. Обработка сигналов ТС. Опрос состояния объектов пунктом управления (ПУ) и контролируемыми пунктами (КП) производится асинхронно. Поэтому на КП организуется накопление и хранение информации в памяти (буферах). МК ТУ/ТС опрашивает все модули ТС за 1 мс и сохраняет полученную информацию в своем буфере памяти. Если в течение восьми циклов опроса, т.е. за время, равное 8 мс, будет отмечено новое устойчивое значение одного или нескольких сигналов ТС, то новый отсчет ТС будет передан в буфер текущих значений ТС (38 байт) и в буфер очереди срезов ТС. Форматы буферов приведены на рис.25. Очередь срезов ТС представляет собой 64 записи рассмотренного формата. Таким образом, буфер текущих значений ТС всегда содержит состояние входов ТС шкафа КП-Б (ТП) или КП-М (ПС) на данный момент времени, а буфер очереди срезов ТС представляет собой историю их изменений.
Рис.15. Формат буферов “Текущие ТС” и “Очереди срезов ТС”
Регистра памяти МК ТУ/ТС В связи с ограничениями на время опроса всех КП организованы два буфера, хранящие информацию о наличии данных, еще не переданных на ПУ. Это позволяет ПУ предварительно опрашивать КП на предмет наличия новой информации, а уже затем оптимально организовывать ее передачу. Буфер статуса (16 бит) хранит отметки о наличии непрочитанных срезов в очередях, а буфер квитирования (16 бит) - отметки о прочтении срезов пунктом управления. Обработка сигналов ТУ. После записи команды в буфере МК ТУ/ТС осуществляется проверка на возможность ее выполнения. Команда исполняется, если: завершено выполнение предыдущей команды; задан номер ТУ от 1 до 128 включительно; в байте кода команды ТУ установлен бит ВКЛ или ОТКЛ; в байте кода команды ТУ сброшены неиспользуемые биты. Формат буфера регистра памяти команды ТУ приведен на рис.16.
Рис.16. Формат буфера команды ТУ
В контроллере МК-Д по номеру ТУ формируется индивидуальный сигнал выбора одного из модулей (Выб_ТУ1. Выб_ТУ8) и четырехразрядный двоичный код номера команды ТУ в данном модуле. Обработка сигналов ТИ. Формирование данных телеизмерения осуществляется в мультиплексорах ТИ (МТИ) и в блоках расширения телеизмерения. Информация от указанных блоков поступает по протоколу Modbus RTU, при этом контроллер МК-Д выполняет функции ведущего устройства (Master). Используется четырехпроводный интерфейс RS-422 в асинхронном режиме на скорости 9600 бит/с с форматами посылок: 1 стартовый бит, 8 бит данных, 1 стоповый бит. Время опроса всех устройств телеизмерения составляет не более 1 с. В МК ТУ/ТС организован буфер для хранения информации об установленной связи с модулями ТИ. При этом единичное значение бита состояния ТИ означает, что есть связь контроллера МК-Д с устройством ТИ по интерфейсу RS-422, а нулевое значение устанавливается в случае, если устройство ТИ не отвечает на запросы контроллера МК-Д. Результаты текущих измерений, поступающие от устройств ТИ, помещаются в буфер " Данные ТИ", формат которого приведен на рис.17.
Рис.17. Формат буфера “Данные ТИ” регистра памяти МК ТУ/ТС Мультиплексор ТУ8/ТС16
В шкафах системы АСТМУ-А могут применяться несколько типов мультиплексоров: ТУ16, ТС32, ТУ8/ТС16. Рассмотрим мультиплексор ГУ8/ТС16, применяемый в шкафах КП-М (ПС). Функциональная схема мультиплексора ТС16/ТУ8 приведена на рис.18.
Рис.18. Функциональная схема мультиплексора ТС16/ТУ8
Мультиплексор осуществляет декодирование команды ТУ, полученной от контроллера МК-Д. Выбор данного мультиплексора отображается индикатором " ТУ". Для каждого из приказов в выходной цепи имеется реле с двумя замыкающими контактами. По одному выводу каждого контакта присоединено к общей цепи ТУ. Таким образом, на набор зажимов Х2 выводится 17 цепей для 8 приказов. Одновременно может быть выдан только один приказ. Оптронные пары D1-D8 обеспечивают гальваническую развязку выходных цепей от цепей шкафа КП-М (ПС). Мультиплексор также обрабатывает сигналы ТС, поступающие от объектов контроля через набор зажимов Х2 на входы Bxl. Bxl 6. Обработка заключается в том, что при выборе данной группы сигналов ТС контроллер МК-Д выставляет кратковременный импульс выбора ТС (VT1), одновременно срабатывает индикатор " ТС". На время опроса на выходную шину D выставляются 16 сигналов ТС данного мультиплексора. Логические единицы поступают на те разряды выходной шины, к которым подключены цепи ТС, имеющие на входе Вх1. Вх16 потенциал 100 В. Такой потенциал может поступать от шинки ШТС через замкнутый контакт реле контролируемого объекта. В интервалах между опросами выходы схем D2_D3 находятся в состоянии высокого сопротивления, т.е. отключены от шин данных D контроллера МК-Д и контроллер в эти интервалы может подключить к этим шинам другой мультиплексор. Таким образом, шина данных используется для передачи информации от нескольких мультиплексоров. Мультиплексор ТИ Мультиплексор телеизмерений МТИ осуществляет телеизмерения и допусковый контроль до 8 аналоговых сигналов ТИ и передает данные по интерфейсу RS-485 управляющему контроллеру МК-Д. Амплитуда входных сигналов ТИ задается перемычками S1. S8. Скорость обмена по интерфейсу RS-485 - 9600 бит/с. Внешние подключения МТИ осуществляются с помощью разъемов XI. ХЗ печатной платы. Сигналы от датчиков напряжения через разъем Х2 поступают в МТИ, где запоминаются и обрабатываются. Ввод программ алгоритмов обработки осуществляется через разъем ХЗ посредством ПЭВМ при наладке модуля. Обработку данных ТИ осуществляет специальный микропроцессор, имеющий в своем составе аналогово-цифровой преобразователь АЦП. Микропроцессор осуществляет также вычисление линейных напряжений по измеренным фазным напряжениям и производит допусковый контроль измеряемых параметров. На лицевой панели блока имеется кнопка " RST" для перезапуска микропроцессора. Исправное состояние МТИ индицируется поочередным миганием с частотой около 0, 5 Гц светодиодов " Rx" и " Тх", контролирующих обмен с блоком МК-Д. Питание подается через разъем XI от блока питания ИГО.
Модем-УКП
Модем предназначен для организации связи по четырехпроводным некоммутируемым каналам тональной частоты и физическим линиям связи между контроллером МК-Д находящимся на КП, и ЭВМ на пункте управления. Модем обеспечивает работу в одном из двух форматов: по системе ЛИСНА или по протоколу Modbus (АСТМУ-А). Во всех форматах диапазон рабочих частот в канале связи от 300 до 3600 Гц. Используется частотная модуляция сигнала с двумя частотами Fh (нижняя частота) и Fb (верхняя частота). Модем осуществляет преобразование двоичных сигналов контроллера МК-Д в аналоговые сигналы линии связи и наоборот (рис. 19).
Рис. 19. Модем УКП
В режиме обмена данными по каналу связи по формату АСТМУ-А обеспечивается скорость передачи данных 1200 бит/с. Для связи с контроллером МК-Д используется интерфейс RS-232 с параметрами блока данных для сигналов: ТС не более 64 байт, ТУ в формате ЛИСНА не более 40 байт, ТУ в формате АСТМУ-А не более 13 байт. На лицевую панель модема-УКП выведены светодиодные индикаторы, индицирующие: соответствие напряжения электропитания модуля норме - ПИТ; нормальное функционирование программы модема - МИГ; достаточность уровня входного сигнала в диапазоне частотного канала модема - УРОВ_СИГН; прием модемом данных из канала связи - ПРМ-ЛИН; передачу модемом данных в контроллер МК-Д - ПРД-RS; прием модемом данных от контроллера МК-Д - ITPM-RS; выдачу модемом в линию связи данных по первому и второму частотному каналу - ПРД-ЛИН_1 и ПРД-ЛИН_2. Функциональная схема модема представлена на рис. 20. В состав платы модема-УКП входят: согласующие линейные цепи А1, модулятор-демодулятор (модем) А2, линейный выходной каскад A3, микропроцессорный контроллер (МПК) А4, переключатели задания режимов работы модуля А5, индикаторы состояний работы МПК А6, схема контроля напряжений электропитания А7, интерфейс RS-232 A8, интерфейс СЕРВИС А9, предварительный полосовой фильтр А10. Согласующие линейные цепи А1 предназначены для согласования входного и выходного линейного сопротивления модема с сопротивлением канала связи в полосе частот от 300 до 3600 Гц. Пятипозиционный переключатель S1 подключает необходимое значение нормирующего входного сопротивления, а двухпозиционный переключатель S2 - нормирующее выходное сопротивление. Трансформаторы Т1 и Т2 осуществляют гальваническую развязку цепей модема от линии связи. Модулятор-демодулятор А2 устроен следующим образом. Кроме модема, в состав модуля А2 входят: входной и выходной полосовые фильтры, детектор уровня входного аналогового сигнала, регулятор уровня аналогового выходного сигнала, выключатель сигнала, SPI-порт, цепи цифровых двоичных сигналов данных D (ТхМ и RxM) и управления С (RTC). Модулятор преобразует двоичные данных от контроллера А4 (сигнал ТсМ) в аналоговый частотно-модулированный сигнал. Демодулятор выполняет обратную функцию - преобразует аналоговый частотно-модулированный сигнал в двоичные данные (сигнал RxM) для контроллера А4. Цифровой сигнал RTC используется для включения и выключения выходного аналогового сигнала.
Рис. 20. Функциональная схема модема УКП Линейный выходной каскад A3 предназначен для согласования с каналом связи и представляет собой преобразователь напряжение - ток, нагрузкой которого является выходной согласующий трансформатор Т2 линейных цепей А1. Микропроцессор А4 предназначен для управления работой модема УКП и обеспечения взаимодействия между составляющими его устройствами. В частности, он обеспечивает преобразование форматов данных канала связи телемеханики ЛИСНА в формат АСТМУ-А и их дистанционное переключение и выполнение диагностической команды, приходящей по линии связи по 20-му каналу. Микропроцессор также согласовывает скорости обмена данными с модемом (не более 1200 бит/с) и интерфейсом А8 (9600 бит/с) в асинхронном режиме. Контроллер А4 проверяет наличие сигнала о достаточности уровня входного сигнала (сигнал DCD) в модеме А2 и отсутствие ошибок в структуре последовательных данных (сигнал RxM) от модема, осуществляет управление сигналом передатчика модема А2, анализирует состояния и работу схем модема-УКП и выводит соответствующую информацию на индикаторы. Предварительный полосовой фильтр А10 осуществляет подавление сигналов низкочастотной (менее 250 Гц) и высокочастотной (более 10 кГц) помехи за пределами рабочей полосы частот. Библиографический список
1. Методические указания к курсовому проектированию по дисциплине “Автоматизация систем электроснабжения”. Составители: канд. техн. наук А.Д. Родченко, В.Ф. Кудряшов; 1998. 2. Почаевец В.С. Автоматизированные системы управления устройствами электроснабжения железных дорог: Учебник для техникумов и колледжей ж. - д. транспорта. М.: Маршрут, 2003. - 380 с. 3. Автоматизация систем электроснабжения. Под ред. Н.Д. Сухопрудского. - М.: Транспорт, 1990. - 359 с. 4. Оборудование контролируемых пунктов системы телемеханики АСТМУ А: учеб. пособие / А.И. Бурьяноватый, М.А. Иванов, Д.В. Ишкин, А.В. Саморуков, С.Н. Полторак. - СПб.: ПГУПС, 2008. - б2с.
Введение
С увеличением расстояния передачи, объёма информации и числа контролируемых объектов особое значение приобретает необходимость сокращения затрат на линии связи, обеспечения качества передачи сигналов и быстродействия системы передачи. Эти проблемы решаются с помощью устройств автоматики и телемеханики, позволяющие наиболее рационально использовать линии связи и одновременно обеспечить надежную, быструю и точную передачу приказов, сигналов и результатов измерений. Автоматика - техника управления и контроля в пределах небольших расстоянии. Телемеханика - техника управления, контроля и регулирования производственными или технологическими процессами при наличии больших расстояний, для преодоления которых применяют специальные средства. Первый опытный телемеханизированный участок Москва-Раменское был введен в эксплуатацию в 1952 г. До 1959 г. Система телемеханики была внедрена на ряде электрифицированных участков железных дорог протяженностью около тысячи километров. В данном курсовом проекте рассматривается автоматизированная система телемеханического управления АСТМУ-А, применяемая на электрифицированных железных дорогах. Данная система телемеханики разрабатывалась при заданных ресурсных ограничениях с учетом тенденции применения современных коммуникационных технологий в системах управления и мониторинга, как железных дорог, так и электроэнергетики. Создана первичная магистральная цифровая сеть связи и первичная сеть связи технологического (дорожного) сегмента, содержащая около четырех тысяч узлов ОТН, которая закрыта от несанкционированного доступа и обеспечивает работу в режиме реального времени устройств автоматики и телемеханики, и центров диспетчерского управления. СПД ОТН обеспечивает функционирование информационно-управляющей системы контроля и управления объектами электроснабжения и контактной сети. На базе первичных сетей созданы вторичные сети, обеспечивающие оперативно-технологическую связь ОТС (включая диспетчерскую связь), общетехнологическую телефонную связь ОбТС, сеть передачи данных СПД. Отдельно выделена сеть передачи данных оперативно-технологического назначения СПД Исходные данные
Вариант 044
Выбор рационального способа кодирования сообщений
Передача команд телеуправления осуществляется по одному общему для всех контролируемых пунктов каналу связи, т.е. устройства телеуправления имеют один общий передающий полукомплект и индивидуальные приемные. Импульсный признак - временной. Кодирование сообщений осуществляется с учетом следующих требований: 1. Помехоустойчивость; 2. Малое число элементов для передачи сообщений; 3. Простой способ для получения кодов; 4. Удовлетворительные параметры передачи (скорость передачи). Для повышения помехоустойчивости за счет выбора из общего возможного числа комбинаций, таких, которые отличаются друг от друга не менее, чем двумя элементами. Число сочетаний из n элементов по m определяется по формуле:
n - общее число элементов; m - число элементов отличающихся от других ( n - m ) своим признаком или местом в общем порядке элементов. Число контролируемых пунктов 15 - кодируем кодом:
Таблица 1.1 Импульсы выбора контролируемых пунктов
Операции кодируем кодом
Таблица 1.2 Импульсы выбора характера операции
Число объектов на КП - 45. Разбиваем объекты на группы, получаем 3 групп по 15 объектов в каждой. Объекты группы кодируем кодом
Таблица 1.3 Импульсы выбора объектов в группе
Кодируем группы кодом
Таблица 1.4 Импульсы выбора группы
Для обеспечения заданного объема телемеханизации необходимое число выходов распределителя в полукомплекте телеуправления должно быть не меньше:
где: N - суммарное число выходов; Nкп - число выходов, необходимых для выбора контролируемого пункта; Nоб/гр - число выходов, необходимых для выбора объекта в группе; Nоп - число необходимых выходов для выбора характера операции; Nгр - число выходов необходимых для выбора группы; 3 - число служебных выходов.
Принимаем пятиразрядный двоичный счетчик по условию m больше n, где m - число выходов распределителя, создаваемое определенным числом разрядов счетчика ( р ). Так как счетчик распределителя составляется из бинарных триггеров (триггеров со счетным входом), имеющих два устойчивых состояния (0 и 1), то есть в основу счета импульсов положена двоичная система. Общее число импульсов, отсчитываемых счетчиком за цикл можно определить по формуле:
где 2 - основная система исчисления; р - число разрядов счетчика (всегда целое).
то есть 32 больше 28, значит, пятиразрядный двоичный счётчик нам вполне подходит.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-16; Просмотров: 203; Нарушение авторского права страницы






 , где
, где

 .
.
 ,
, 
 ,
,  ,
, 