
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Свойства операций над векторами
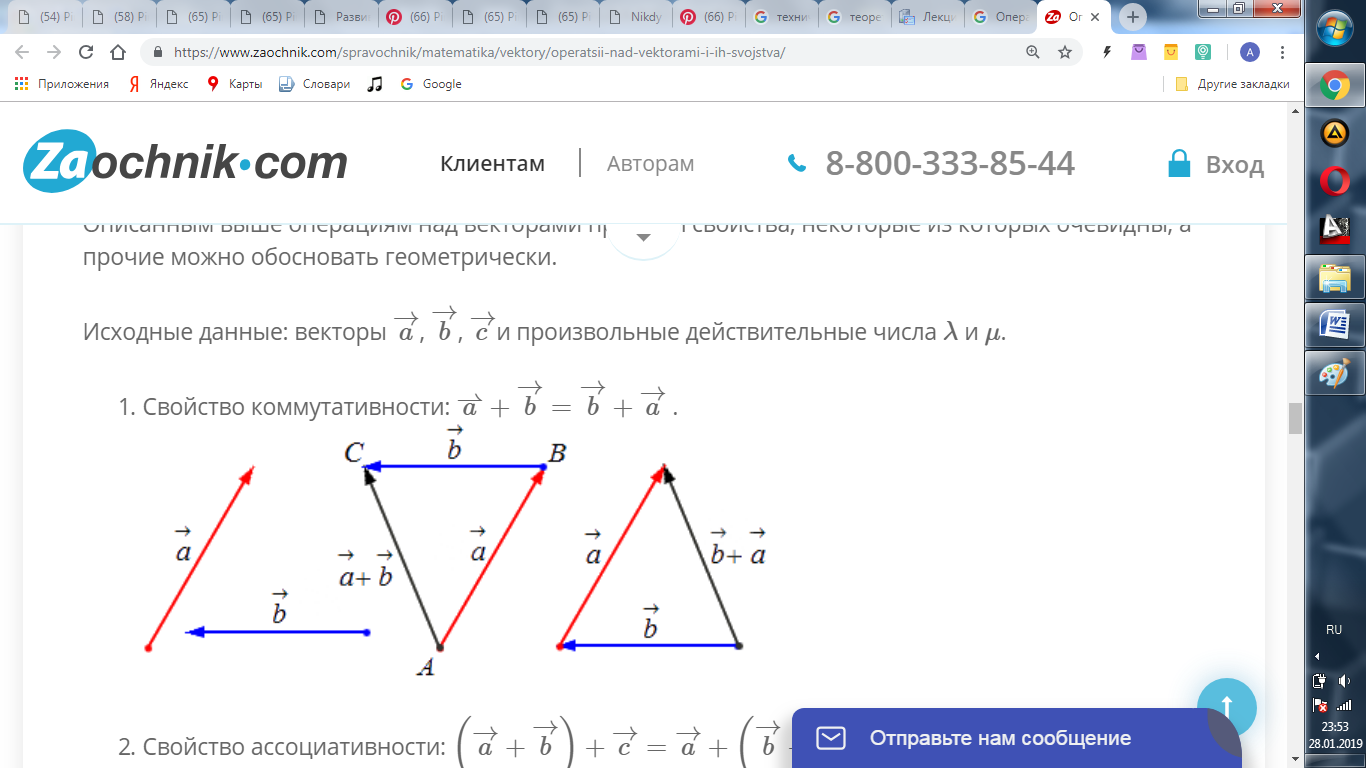
Описанным выше операциям над векторами присущи свойства, некоторые из которых очевидны, а прочие можно обосновать геометрически.
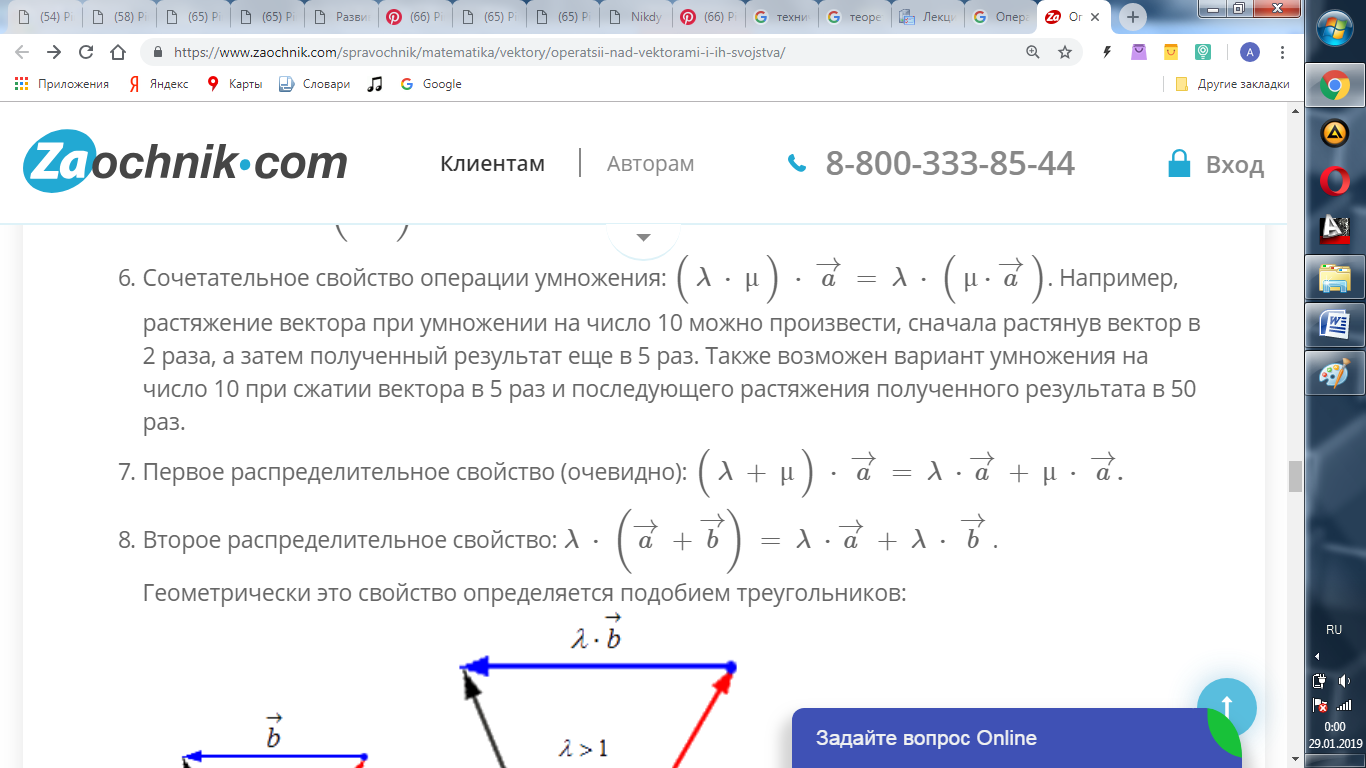
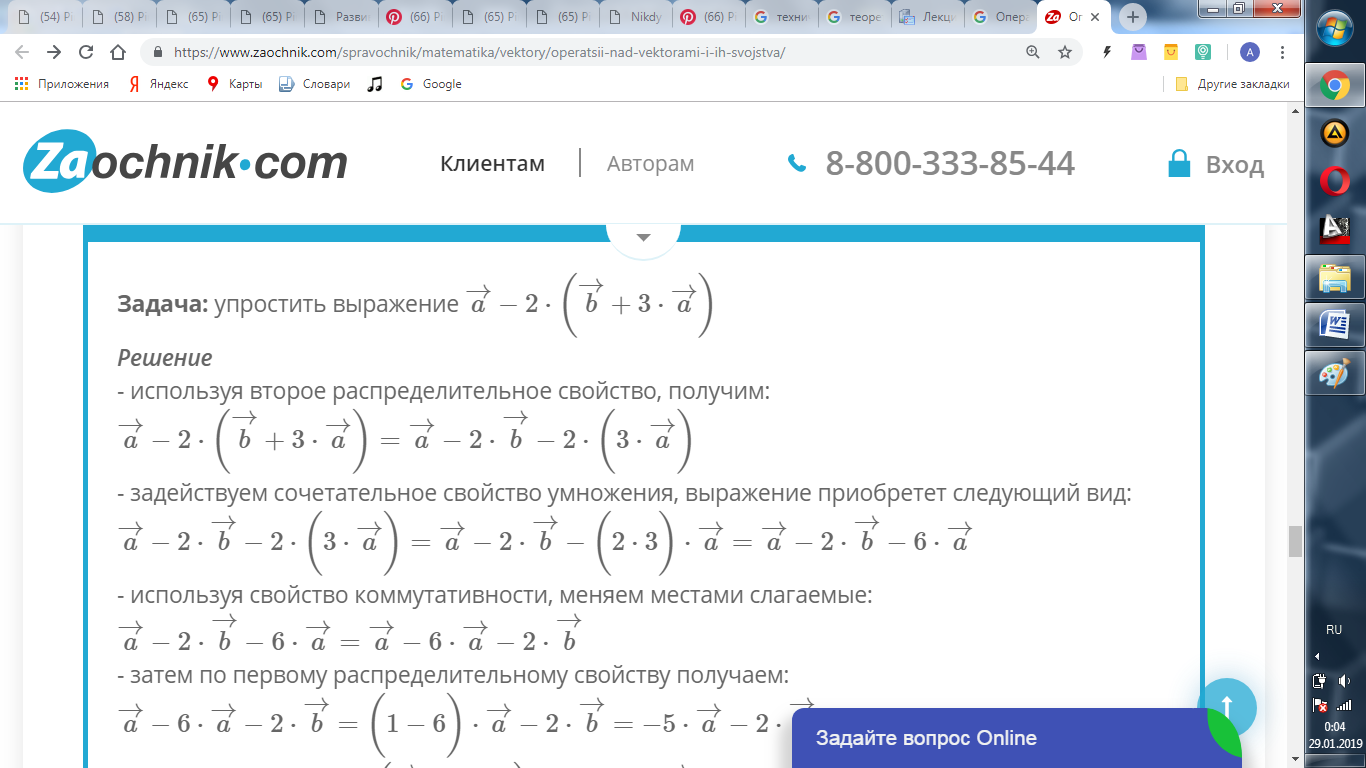
Свойства коммутативности и ассоциативности дают возможность складывать векторы в произвольном порядке. Перечисленные свойства операций позволяют осуществлять необходимые преобразования векторно-числовых выражений аналогично привычным числовым. Рассмотрим это на примере.
2. Правые и левые системы координат. Декартовы системы координат делятся на два вида: правую и левую. Рассмотрим декартовы системы координат на плоскости (см. рис. 3).
Рис. 3
Рассмотрим декартовы системы координат в пространстве (см. рис. 4).
Рис.4
Нахождение длины вектора по координатам. Длину вектора Начнем с нахождения длины вектора на плоскости по координатам. Введем на плоскости прямоугольную декартову систему координат Oxy. Пусть в ней задан вектор
В силу теоремы Пифагора справедливо равенство Таким образом, формула для нахождения длины вектора
3. Длина, проекции и направляющие косинусы вектора. В дальнейшем будем рассматривать правую декартову систему координат. Единичные вектора вдоль осей Ox, Oy и Oz образуют систему единичных (или базисных) векторов. Любой вектор, имеющий начало в точке O, можно представить как сумму
рис.5 Длина (или модуль) вектора Если вектор
Рассмотрим пример. Найдите длину вектора
Нахождение длины вектора по теореме косинусов. Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами, опущенными из начала и конца вектора на эту ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси, и отрицательной (-), если проекция направлена в противоположную сторону (см. рис.6).
рис.6 Направляющими косинусами
Любая точка пространства с координатами (x, y, z) может быть задана своим радиус-вектором
Координаты (x, y, z) это проекции вектора Основные понятия статики Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил. Твердое тело. В статике все тела считаются абсолютно твердыми. То есть предполагается, что эти тела не деформируются, не изменяют свою форму и объем, какое бы действие на них не было оказано. Материальной точкой будет называться абсолютно твердое тело, размерами которого можно пренебречь. Исследованием движения нетвердых тел – упругих, пластичных, жидких, газообразных, занимаются другие науки (сопротивление материалов, теория упругости, гидродинамика и т.д.). Под равновесием будем понимать состояния покоя тела по отношению к другим материальным телам. Основные понятия: 1. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой. В Международной системе единиц (СИ) силу измеряют в ньютонах (Н), килоньютонах (кН).
Силу, как и другие векторные величины, изображают в виде направленного отрезка со стрелкой на конце, указывающей его направление. Прямая LM, вдоль которой направлена сила, называется линией действия силы. Понятия «линия действия» и «направление» близки, но не тождественны. Очевидно, что по линии действия можно определить направление с точностью до противоположного. Аналогично связаны понятия «модуль» и «величина» для вектора. В тексте вектор силы обозначается латинскими буквами
Предполагается, что действие силы на тело не изменится, если ее перенести по линии действия в любую точку тела (конечно – твердого тела). Поэтому вектор силы называют скользящим вектором. Если силу перенести в точку, не расположенную на этой линии, действие ее на тело будет совсем другим (пример - стул, см. выше). 2. Совокупность сил, действующих на какое-нибудь твердое тело, будем называть системой сил. 3. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным.(воздушный шар) 4. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
Например, если системы сил, изображенных на рис. 9.1, а и рис. 9.1, б, уравновешены, то эти две системы сил будут эквивалентны друг другу.
Рис.9.1. Система сил: а – заданная система сил; б – эквивалентная система сил
5. Система сил, под действием которой свободное твердое тело может находиться в покое или движется равномерно и прямолинейно, называется уравновешенной
6. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Таким образом, равнодействующая - это сила, которая одна заменяет действие данной системы сил на твердое тело. Так как система сил F 1 и F 2 эквивалентна одной силе R (рис. 9.1, б), то сила R называется равнодействующей данной системы сил. Силы F1 и F 2 в свою очередь могут называться составляющими силы R. 7. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой. 8. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга. 9. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными. Понятие о сосредоточенной силе является условным, так как практически приложить силу к телу в одной точке нельзя. Силы, которые мы в механике рассматриваем как сосредоточенные, представляют собою по существу равнодействующие некоторых систем распределенных сил. В частности, обычно рассматриваемая в механике сила тяжести, действующая на данное твердое тело, представляет собою равнодействующую сил тяжести его частиц. Линия действия этой равнодействующей проходит через точку, называемую центром тяжести тела. Лекция Пт 24, 01, 2020
Этот принцип утверждает, что в природе не существует односторонних явлений. На рис. 13.1 изображена балка, опирающаяся на стены концами А и В. Для выявления сил действия и противодействия отделим балку от стен. Тогда силы действия балки на стену выражаются силами DA и DB, приложенными к стенам, а силы противодействия - силами RA и RB, приложенными к балке, которые в дальнейшем будем называть реакциями.
Рис. 13.1. Опирание балки на опоры: а – схема загружения балки; б – силы действия балки на опоры и противодействия со стороны опор на балку
Аксиомы статики. Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике. Аксиома 1. (см. картинку)Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны (рис. 10).
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может. Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу. Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
В самом деле, пусть на твердое тело действует приложенная в точке А сила Таким образом, вектор, изображающий силу Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Вектор геометрической суммой векторов
Величина равнодействующей Конечно, Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке. Аксиома 4 (принцип противодействия). При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие. Закон о равенстве действия и противодействия является одним из основных законов механики. Из него следует, что если тело А действует на тело В с силой
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Из принципа отвердения следует, что условия, необходимые и достаточные для равновесия абсолютно твердого тела, необходимы, но не достаточны для равновесия деформируемого тела, по форме и размерам тождественного с данным. Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д. Аксиома 6 (аксиома связей).Всякое несвободное тело можно рассматривать как свободное, если механическое действие связей заменить реакциями этих связей (пояснения к этой аксиоме в следующем параграфе). Приведенные принципы и аксиомы положены в основу методов решения задач статики. Все они широко используются в инженерных расчетах. |
Последнее изменение этой страницы: 2020-02-16; Просмотров: 120; Нарушение авторского права страницы







 будем обозначать
будем обозначать  или а. Аналогичное обозначение имеет модуль числа, и длину вектора часто называют модулем вектора.
или а. Аналогичное обозначение имеет модуль числа, и длину вектора часто называют модулем вектора. . Получим формулу, позволяющую находить длину вектора
. Получим формулу, позволяющую находить длину вектора  и
и  .
. Отложим от начала координат (от точки О) вектор
Отложим от начала координат (от точки О) вектор  . Обозначим проекции точки А на координатные оси как
. Обозначим проекции точки А на координатные оси как  и
и  соответственно и рассмотрим прямоугольник
соответственно и рассмотрим прямоугольник  с диагональю ОА.
с диагональю ОА. , откуда
, откуда  . Из определения координат вектора в прямоугольной системе координат мы можем утверждать, что
. Из определения координат вектора в прямоугольной системе координат мы можем утверждать, что  и
и  , а по построению длина ОА равна длине вектора
, а по построению длина ОА равна длине вектора  , следовательно,
, следовательно,  .
. по его координатам на плоскости имеет вид
по его координатам на плоскости имеет вид  .
. , числа (ax, ay, az) - это проекции вектора
, числа (ax, ay, az) - это проекции вектора  на оси координат (см. рис.5).
на оси координат (см. рис.5).
 и обозначается а или |
и обозначается а или |  , то его длина вычисляется по этой же формуле
, то его длина вычисляется по этой же формуле  , заданного в декартовой системе координат.
, заданного в декартовой системе координат.



 вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.
вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.

 на оси координат.
на оси координат.
 Например, будем прикладывать к стулу одну и ту же по модулю силу F. При приложении силы сверху вниз стул остается в состоянии покоя; при положении силы снизу вверх - стул поднимается; изменим направление нагружения, приложим силу горизонтально к спинке стула - стул опрокинется. Так как во всех случаях направление и место приложения силы различны, то и результат действия силы на стул разный, несмотря на то, что модуль силы F во всех случаях одинаков.
Например, будем прикладывать к стулу одну и ту же по модулю силу F. При приложении силы сверху вниз стул остается в состоянии покоя; при положении силы снизу вверх - стул поднимается; изменим направление нагружения, приложим силу горизонтально к спинке стула - стул опрокинется. Так как во всех случаях направление и место приложения силы различны, то и результат действия силы на стул разный, несмотря на то, что модуль силы F во всех случаях одинаков. и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.
и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.

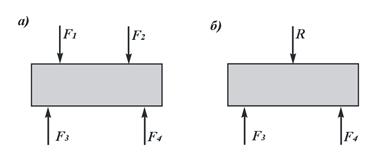










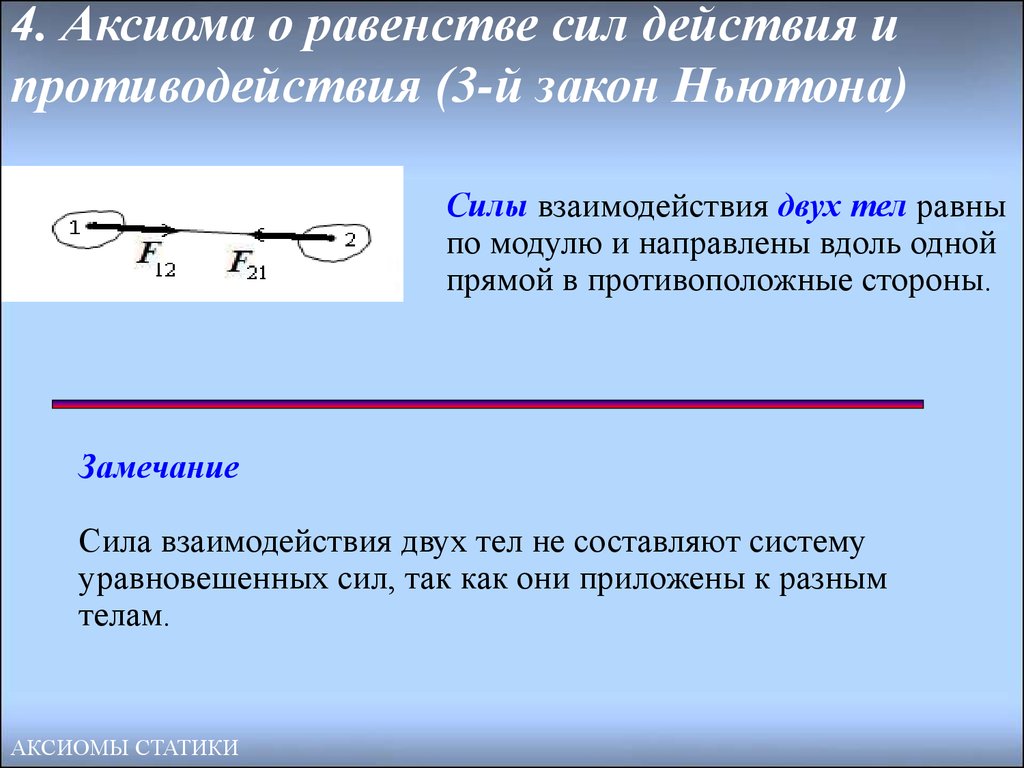



 Рис.10
Рис.10  рис.11
рис.11  (рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы
(рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы  и
и  , такие, что
, такие, что  ,
,  . От этого действие силы
. От этого действие силы  , равный диагонали параллелограмма, построенного на векторах
, равный диагонали параллелограмма, построенного на векторах  .
. рис.12
рис.12  .
. Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то
Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то 
 (рис. 13). Однако силы
(рис. 13). Однако силы  не образуют уравновешенной системы сил, так как они приложены к разным телам. Эта аксиома соответствует третьему закону Ньютона: действие всегда равно и противоположно противодействию. При этом необходимо помнить, что в аксиоме 4 рассматривается случай, когда силы приложены к разным телам и в этом случае система сил не является уравновешенной в отличие от случая действия сил в аксиоме 2.
не образуют уравновешенной системы сил, так как они приложены к разным телам. Эта аксиома соответствует третьему закону Ньютона: действие всегда равно и противоположно противодействию. При этом необходимо помнить, что в аксиоме 4 рассматривается случай, когда силы приложены к разным телам и в этом случае система сил не является уравновешенной в отличие от случая действия сил в аксиоме 2. рис.13
рис.13