
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механические характеристики электродвигателя. На рис. 4.14а показана схема включения электродвигателя
На рис. 4.14а показана схема включения электродвигателя. В цепи обмотки якоря и обмотки возбуждения включены регулировочные сопротивления Rр и Rв. Электродвигатель приводит во вращение рабочую машину PM со скоростью ω, развивая электромагнитный момент, равный и противоположно направленный моменту сопротивления рабочей машины. При вращении в обмотке якоря возникает противо-ЭДС. В соответствии со вторым законам Кирхгофа
откуда
Ток якоря зависит от электромагнитного момента Следовательно,
Зависимость (4.5) ω = f(IЯ) называется электромеханической характеристикой, а зависимость (4.6) ω = φ (МЭМ) – механической характеристикой (см. рис. 4.14 б). Эти характеристики можно построить в одних осях, т.к. ток якоря при неизменном магнитном потоке пропорционален электромагнитному моменту. Механическая характеристика представляет собой прямую линию, которую можно построить по двум точкам. При МЭМ = 0 (режим холостого хода) скорость холостого хода ω 0 = U/к∙ Ф максимальна, с увеличением электромагнитного момента она уменьшается. Момент, при котором скорость равна нулю, называется пусковым. Номинальный момент на порядок меньше пускового.
Рис. 4.14. Схема включения двигателя (а) и его электромеханическая и механическая характеристики (б)
Кажется странным, что с увеличением вращающего момента скорость двигателя не возрастает, а уменьшается. Но механическая характеристика снимается в установившемся режиме, при котором скорость вращения двигателя постоянна. В этом режиме электромагнитный момент устанавливается равным моменту сопротивления рабочей машины. То есть электромагнитный момент не является независимым параметром. Он устанавливается в зависимости от механической нагрузки (МЭК = МС). Поэтому зависимость ω = φ (МЭМ) надо понимать так: механическая характеристика двигателя показывает, как изменяется скорость вращения двигателя при изменении нагрузки на его валу. В режиме идеального холостого хода МС = 0 и, следовательно, Это будет иметь место при EЯ = U. Иначе говоря, при отсутствии механической нагрузки двигатель будет разгоняться до скорости ω 0, при которой ЭДС обмотки якоря сравняется с напряжением сети. Чем больше будет механическая нагрузка, тем большим должен быть электромагнитный момент МЭМ = к∙ Ф∙ IЯ, тем больший ток должен потреблять электродвигатель. Увеличение тока происходит за счет уменьшения противо-ЭДС, которая пропорциональна скорости вращения. Следовательно, при увеличении нагрузки, чтобы развивать больший электромагнитный момент, двигатель вынужден потреблять больший ток из сети ценой уменьшения скорости вращения. Двигатель с последовательным возбуждением имеет обмотку возбуждения с малым числом витков и включается последовательно с обмоткой якоря. Ток возбуждения равен току якоря и, пока магнитная система не насыщена, вращающий момент пропорционален квадрату тока якоря ( Электромеханическая характеристика (скоростная характеристика)
Эта характеристика имеет вид гиперболической зависимости. Схема включения двигателя последовательного возбуждения и электромеханическая характеристика приведены на рис.4.15
Рис. 4.15. Схема двигателя последовательного возбуждения (а) и его электромеханическая характеристика (б)
Так как Механическая характеристика двигателя с последовательным возбуждением мягкая. При уменьшении нагрузки скорость вращения резко возрастает и становится опасной для двигателя, а на холостом ходу двигатель идет в “разнос”. Поэтому двигатели с последовательным возбуждением могут применяться при гарантированной нагрузке на его валу. У двигателя со смешенном возбуждении на главных полюсах имеется две обмотки возбуждения: параллельная (шунтовая) и последовательная (сериесная). При согласном включении обмоток магнитные потоки складываются
Рис.4.16. Схема включения двигателя смешенного возбуждения (а) и его электромеханическая характеристика (б) Характеристики двигателя зависят от соотношения между магнитными потоками обеих обмоток. Если преобладает магнитный поток шунтовой обмотки, то характеристика двигателя со смешанным возбуждением по своему характеру приближается к характеристикам двигателя с параллельным возбуждением, но его скоростная и механическая характеристики более мягкие, так как с ростом нагрузки поток последовательной обмотки увеличивается, а скорость вращения уменьшается в большей мере (кривая 2 на рис. 4.16), чем у двигателя с параллельным возбуждением (кривая 1 рис. 4.16). Если основную роль играет последовательная обмотка, то характеристика двигателя со смешенным возбуждением приближается к характеристике двигателя с последовательным возбуждением, то – есть становится мягкой (кривая 3 на рис. 4.16). |
Последнее изменение этой страницы: 2020-02-16; Просмотров: 109; Нарушение авторского права страницы
 , (4.4)
, (4.4) . (4.5)
. (4.5) .
. . (4.6)
. (4.6)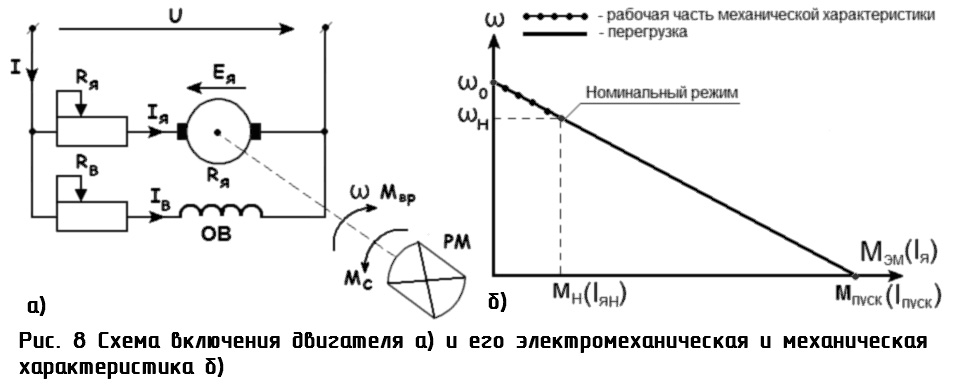
 . В этом режиме якорь не потребляет ток
. В этом режиме якорь не потребляет ток  .
. ).
).
 . (4.7)
. (4.7) , то с ростом нагрузки на валу двигателя скорость вращения двигателя резко уменьшается, поскольку при увеличении тока якоря магнитный поток также возрастает, а влияние падения напряжения
, то с ростом нагрузки на валу двигателя скорость вращения двигателя резко уменьшается, поскольку при увеличении тока якоря магнитный поток также возрастает, а влияние падения напряжения  невелико (рис. 4.15).
невелико (рис. 4.15). . Вращающий момент и скорость вращения двигателя определяются суммарным действием магнитных потоков
. Вращающий момент и скорость вращения двигателя определяются суммарным действием магнитных потоков  ,
,  . На рис. 4.16 представлена схема включения двигателя и его электромеханическая характеристика.
. На рис. 4.16 представлена схема включения двигателя и его электромеханическая характеристика.