|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Унификация и стандартизация измерительных преобразователей
В отечественном приборостроении вопросы унификации и стандартизации измерительных преобразователей решаются в рамках Государственной системы промышленных приборов и средств автоматизации (ГСП). Для того чтобы создавать сложные информационные системы (управляющие, измерительные), необходимо в первую очередь обеспечить информационную совместимость технических средств. С этой целью в рамках ГСП сначала были унифицированы, а затем и стандартизированы выходные сигналы ИП. По виду выходных сигналов различают измерительные преобразователи с естественным и унифицированным выходными сигналами. Первые — представляют собой устройства, в которых осуществляется первичное (обычно однократное) преобразование измеряемой физической величины. Естественное формирование сигнала здесь обеспечивается методом преобразования и конструкцией ИП. Такие преобразователи чаще всего применяют
в устройствах прямого регулирования либо при централизованном контроле сравнительно простых объектов. В ГСП приняты десять видов естественных выходных сигналов (рис. 3.3). При создании относительно сложных систем с использованием ЭВМ и необходимости передачи сигналов на большие расстояния применяют преобразователи естественных сигналов в унифицированные. Для этих целей разрабатываются специальные нормирующие преобразователи, параметры выходных сигналов которых приведены на рис. 3.3. Контрольные вопросы 1. Что представляют собой измерительный преобразователь, первичный преобразователь и датчик? 2. Какие виды энергии используются в преобразователях? 3. Перечислите основные требования, предъявляемые к преобразователям. 4. По каким признакам можно классифицировать измерительные преобразователи? 5. Какие виды статических характеристик характерны для измерительных преобразователей? 6. Что такое основная и дополнительная погрешности датчика? 7. Что такое относительная приведенная погрешность и класс точности датчика? 8. Каковы структурная схема, статическая характеристика и погрешность прямого (однократного) преобразования? 9. Каковы схема последовательного прямого преобразования, его статическая характеристика и погрешность?
10. Что представляет собой и в каких случаях применяется дифференциальная схема преобразования? 11. Как построена и какие имеет преимущества схема преобразования с обратной связью?
Глава 4 ИЗМЕРИТЕЛЬНЫЕ ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИКИ (ДАТЧИКИ) Общие сведения Функцией измерительного элемента является измерение регулируемой или какой-либо другой величины, дающей необходимую для управления информацию. Одновременно измерительный элемент осуществляет преобразование измеренной величины в величину другого вида, удобную для передачи сигналов в данной автоматической системе. В большинстве систем автоматического управления для передачи и обработки сигналов, несущих информацию об управляемом процессе, используются электрические величины, т. е. большинство датчиков автоматически преобразуют измеряемые величины любой физической природы (скорость, давление, перемещение и др.) в электрические. Измеряемая величина является входной величиной датчика. Выходная электрическая величина может представлять собой один из параметров электрической цепи (К, I, С) или ЭДС. Датчики, преобразующие входную величину в ЭДС, называются генераторными, а датчики, преобразующие входную величину в изменение параметра электрической цепи, — параметрическими. По характеру представления выходной величины датчики подразделяются на измерительные и релейные. Измерительные датчики имеют линейную статическую характеристику и выдают значение измеряемой величины в непрерывной (аналоговой) форме. Релейные датчики имеют релейную характеристику и выдают дискретный по уровню сигнал, соответствующий некоторому предельному значению измеряемой величины. Датчики перемещений Потенциометрические датчики Потенциометрический датчик (рис. 4.1), являющийся датчиком линейных или угловых перемещений, представляет собой реостат с подвижным контактом — щеткой, включенной по схеме
потенциометра. Перемещение подвижного контакта такого датчика преобразуется в напряжение, снимаемое со щетки и одной клеммы обмотки потенциометра (см. рис. 4.1, а). Характеристика потенциометра линейна, если сопротивление нагрузки значительно больше его сопротивления. Динамические свойства потенциометра также зависят от его нагрузки; при активной нагрузке он практически безинерционен, а при емкостной и индуктивной нагрузках изменение его выходного сигнала будет отставать от изменения входного сигнала, так как динамические процессы в электрических цепях с реактивным сопротивлением протекают не мгновенно. Чувствительность потенциометрических датчиков при измерении перемещений составляет 3...5 В/мм. Конструкции потенциометра разнообразны. Наиболее распространен потенциометр с каркасом цилиндрической формы (см. рис. 4.1, б), которая обеспечивает небольшие его габариты и позволяет снизить усилия, необходимые для перемещения щетки, а следовательно, уменьшить зону нечувствительности, что очень важно при измерении малых перемещений. Каркасы потенциометров делают из пластмасс, керамики, оксидированного алюминия, а обмотки — из сплавов с высоким удельным сопротивлением (константана, сплавов платины, золота). Для намотки используется проволока малого диаметра (до сотых долей миллиметра), так как чем меньше диаметр проволоки, тем меньше ступенчатость статической характеристики (см. рис. 4.1, в). Щетки потенциометров изготовляют из сплавов серебра, платины, иридия, палладия и др. Применяются и потенциометры с каркасами другой формы, например, если надо произвести измерения большого линейного перемещения с большой точностью, — прямолинейные, большой длины. Достоинства потенциометрического датчика — простота конструкции и схемы, малые габаритные размеры и масса; недостаток — наличие скользящего контакта, который, во-первых, снижает надежность, а во-вторых, ограничивает срок его эксплуатации, так как со временем происходит истирание проволоки и характеристика потенциометра меняется. Индуктивные датчики Принцип действия индуктивного датчика состоит в преобразовании перемещения подвижной части его магнитопровода в изменение индуктивности катушек. Применяется такой датчик главным образом для точных измерений малых перемещений. Схемы конструкций простого и дифференциального индуктивных датчиков представлены на рис. 4.2, а, б. Измеряемое перемещение предмета 1 вызывает перемещение подвижной части магнитопровода 2, изменение воздушного зазора δ и в конечном счете изменение индуктивности в обмотке 3. (В дифференциальном датчике изменяются индуктивностиI обеих обмоток 3.) Обмотки включены в мостовую схему переменного тока, поэтому выходной сигнал датчика — разбаланс моста пропорционален входному сигналу — перемещению. Статическая характеристика датчика представлена на рис. 4.2, в. Чувствительность индуктивных датчиков может достигать 10 В/мм; линейная область характеристики невелика. Индуктивным датчиком можно измерять перемещения порядка 10 -7 м.
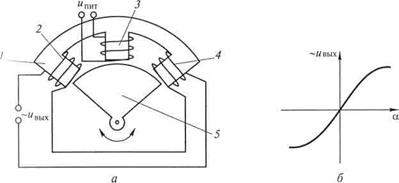
Индукционные датчики Действие индукционного датчика основано на изменении индуктивных связей между его обмотками при смещении подвижных элементов магнитопровода. Существует много разновидностей таких датчиков, но наиболее распространен дифференциальный трансформаторный датчик (рис. 4.3). На полюсных выступах неподвижной части магнитопровода 1 такого датчика расположены 1)0мотка возбуждения 3 и сигнальные обмотки 2 и 4, с которых м и мается выходное напряжение. Измеряемое перемещение воздействует на подвижную часть магнитопровода 5.
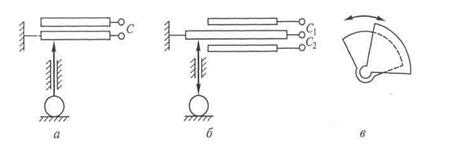
Рис.. 4.3. Схема конструкции (а) и статическая характеристика (б) индукционного трансформаторного датчика: неподвижная часть магнитопровода; 2, 4 — сигнальные обмотки; 3 — обмотка возбуждения; 5 — подвижная часть магнитопровода Когда магнитопровод находится в среднем положении, магнитный поток, создаваемый катушкой 3, наводит в обмотках 2 и 4 равные ЭДС; поскольку эти катушки соединены встречно, на (1, 1 ходе датчика сигнала в этом случае нет. При смещении подвижной части магнитопровода ЭДС в одной из сигнальных катушек увеличивается, а в другой — уменьшается, и на выходе появляется сигнал, равный разности этих ЭДС. Емкостные датчики Принцип действия емкостного датчика состоит в преобразовании перемещения в изменение емкости С. Емкостные датчики бывают простые и дифференциальные. На рис. 4.4 представлены схемы конструкций некоторых емкостных датчиков. Емкость в таких датчиках может изменяться в результате изменения расстояния между пластинами (см. рис. 4.4, а, б), площади взаимного перекрытия пластин (см. рис. 4.4, в), а также и за счет изменения диэлектрических свойств изолирующего промежутка.
Рис. 4.4. Схемы конструкций емкостных датчиков: а, б — соответственно простого и дифференциального с переменным расстоянием между пластинами; в — с переменной площадью взаимоперекрытия пластин
Емкостные датчики питаются переменным током высокой частоты. Они очень чувствительны, а следовательно, в большой степени подвержены влиянию различных помех (наводок, действию внешних емкостей, отклонениям питающего напряжения и др.), поэтому применяются преимущественно как датчики релейного типа. Фотоэлектрические датчики Действие фотоэлектрического датчика основано на преобразовании изменения светового потока в изменение электрических параметров фотоэлемента. Фотоэлементы — это особый вид полупроводников или электронных приборов (газонаполненные элементы). Для измерения перемещений обычно используются фоторезисторы,
меняющие свое внутреннее сопротивление при изменении освещения, и фотодиоды, которые при изменении освещения меняют свои вентильные свойства.
Схема фотоэлектрического датчика представлена на рис. 4.5.
Работают фотоэлектрические датчики следующим образом. Измеряемое перемещение вызывает перекрытие светового потока, освещающего фотоэлемент. Изменение электрических параметров воспринимается электрической схемой, обычно усилителем. Эти датчики широко применяются в промышленности не только для измерения перемещений, но и для контроля чистоты поверхности, наличия дефектов поверхности, счета деталей на конвейерах и т. п. Существует группа фотоэлектрических импульсных датчиков, которые работают в комплексе со счетными устройствами. Такой комплекс позволяет измерять большие перемещения (как угловые, так и линейные) с высокой точностью. Высокая (в сравнении с другими видами датчиков) точность достигается за счет увеличения масштаба измеряемого перемещения при его учете. Примером может служить муаровый растровый датчик, представляющий собой комбинацию двух растров — подвижного и неподвижного (рис. 4.6). Растры — это решетки из прозрачных и непрозрачных полос, форма которых может быть различной. На рис. 4.6, а, б представлены радиальные центральный и нецентральный растры, сопряжение которых применяется при измерении угловых перемещений, а на рис. 4.6, в, г — растровые решетки, сопряжение которых используется при измерении линейных перемещений. Растровое сопряжение устанавливается на пути светового потока таким образом, чтобы он проходил перпендикулярно к обоим растрам. При перемещении подвижного растра относительно неподвижного образуются комбинационные муаровые полосы, движущиеся перпендикулярно к измеряемому перемещению. Эти полосы пересекают световой поток, модулируют его, и фотодатчик формирует импульсы. Выходной сигнал измерительной схемы имеет цифровую форму — это число импульсов, учтенных счетчиком.
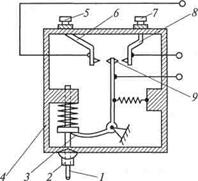
Электроконтактные датчики Электроконтактные датчики перемещения имеют релейную характеристику и применяются в основном для контроля размеров деталей. Электроконтактные датчики бывают однопредельные (с одним контактом) и двухнедельные (с двумя контактами). Однопредельные датчики применяются для контроля размера детали по допуску одного знака. Двухнедельные датчики позволяют контролировать размер детали по допускам «+» и «-». Электроконтактные датчики измеряют не фактические размеры деталей, а только разброс их значений. Например, при контроле диаметра цилиндрической детали воспринимающий стержень (измерительный наконечник) смещается относительно корпуса датчика, воспринимая разность между максимальным и минимальным диаметрами. На рис. 4.7 представлена схема конструкции двухнедельного электроконтактного датчика.
Рис. 4.7. Схема конструкции двухнедельного электроконтактного датчика: 1 — воспринимающий стержень; 2 — направляющая гильза; 3 — двуплечный рычаг; 4 — корпус; 5, 7 — настроечны винты; 6, 8, 9 — контакты
Датчики, предназначенные для точных измерений (с погрешностью не более 0, 01 мм), рассчитаны на очень малый ток в цепи контактов (порядка десятых долей миллиампера), поэтому их включают с усилительными электронными схемами. Датчики для более грубых измерений могут включаться непосредственно в цепи обмоток реле. Путевой выключатель Путевой выключатель (рис. 4.8) — это предельный датчик перемещения. Он применяется в электрических схемах промышленной автоматики для подачи команд о начале перемещения какого-либо подвижного узла или проходе определенного участка пути. Путевой выключатель представляет собой систему из нескольких
Рис. 4.8. Схема конструкции (а) и статические характеристики (б) путевого выключателя: воспринимающий стержень; 2, 4 — неподвижные контакты; 3 — подвижный контакт; 5 — корпус
пар неподвижных и подвижных контактов, которые непосредственно связаны с перемещающимся узлом. Точность срабатывания такого датчика по отношению к перемещению невелика — от 10 до 2 мм в зависимости от типа выключателя. Датчики скорости Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 3135; Нарушение авторского права страницы