
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Время срабатывания электромагнита
Временем срабатывания электромагнита называется отрезок времени от момента подачи импульса на его срабатывание до момента полного срабатывания. Различают время срабатывания при включении и отключении. Для электромагнита контактного аппарата время срабатывания при включении – это время от момента включения катушки до замыкания включающих контактов. Время срабатывания при отключении – от момента отключения катушки до замыкания размыкающих контактов. Время срабатывания состоит из двух составляющих: t0 – время от момента подачи импульса на срабатывание до момента начала движения (время трогания); tд – время движения якоря. Время t0 при включении электромагнита постоянного тока определяется на основании закона изменения тока в катушке: i = Iу (1 -
где i – ток в катушке; Iу – установившийся ток, Iу = U/Rк; Т – электромагнитная постоянная времени Т =
Логарифмируя (3.22), получим для тока трогания Iтр:
t0 = T ln Эта зависимость соответствует обычной схеме включения и не учитывает влияние вихревых токов. При их учете постоянная времени увеличивается. Для увеличения быстродействия электромагнитов постоянного тока сердечник делают шихтованным, а также применяют форсировку, то есть первоначально катушку включают на повышенное напряжение, а после замыкания магнитной цепи напряжение ограничивают до номинального. При отключении аппарата t0 определяется по уравнению: i = Iу При этом время уменьшения тока при отключении катушки весьма мало и у большинства аппаратов t0 при отключении можно не учитывать. Определение времени движения сложно, так как уравнения носят нелинейный характер. Поэтому при проектировании оно определяется приближенно, а для построенного аппарата может быть определено экспериментально по динамической тяговой характеристике или осциллограмме тока катушки (рис. 3.12). По ней можно определить t0 , tд. Из-за различия постоянных времени при разомкнутом и замкнутом магнитопроводе темп изменения тока до и после включения аппарата различен. Некоторое снижение тока в момент начала движения якоря объясняется тем, что в катушке индуктируется ЭДС пропорциональная скорости движения якоря. Для создания быстродействую-
щих аппаратов с целью уменьшения tд необходимо уменьшить ход якоря, массу подвижных частей и силу сопротивления за счет ослабления возвратной и контактных пружин. В ряде случаев требуется получить большие выдержки времени при включении и отключении аппаратов. Существует два основных метода изменения времени срабатывания: магнитное демпфирование, когда меняется t0 за счет изменения электромагнитной постоянной времени контура;
механическое демпфирование, когда изменяется время tд за счет увеличения механической постоянной времени аппарата.
Рис. 3.13. Электромагнитное демпфирование электромагнита постоянного тока
Магнитное демпфирование осуществляется применением демпфирующей гильзы или изменением схемы включения обмоток электромагнитов. При этом t0 при включении меняется мало, поэтому магнитное демпфирование применяется в основном для увеличения времени отключения. Гильза представляет собой трубку из проводящего металла (медь, алюминий), которая одевается на магнитопровод (рис. 3.13, а, б). В этом случае при отключении катушки ток в ней спадает очень быстро, но при этом в гильзе индуктируется значительная ЭДС и протекает ток, создающий дополнительный магнитный поток, увеличивающий время переходного процесса (рис. 3.13, в). Увеличение времени t0 за счет изменения схемы включения осуществляется закорачиванием катушки аппарата или шунтированием ее сопротивлением или конденсатором. При этом в случае шунтирования резистором или закорачивания катушки увеличивается постоянная времени контура, что приводит к затягиванию спадания магнитного потока. Применение конденсатора приводит к тому, что создается колебательный контур, переходный процесс в котором в зависимости от соотношения параметров может быть апериодическим или колебательным. Во втором случае может быть получено снижение времени отключения. Для создания систем замедленного действия за счет увеличения времени движения применяются механические демпферы. Получили распространение воздушные и масляные цилиндры, турбинки, часовые и маятниковые механизмы. Некоторые конструкции этих устройств будут рассмотрены позднее в связи с изучением электромагнитных реле времени на переменном токе (глава 8, 8.1).
Лекция 5 Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1304; Нарушение авторского права страницы
 ), (3.22)
), (3.22) =
=  .
. .(3.23)
.(3.23)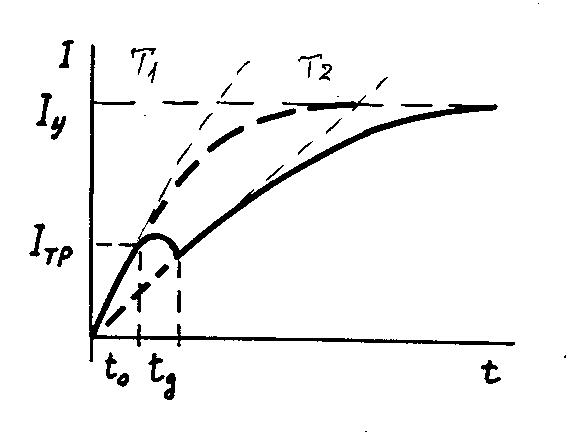 Рис. 3.12. К определению времени срабатывания электромагнита постоянного тока
Рис. 3.12. К определению времени срабатывания электромагнита постоянного тока

