
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Линеаризация в пространстве состояний
Как было показано выше, описание в пространстве состояний можно получить, выполняя преобразование ПФ объекта. Однако возможен и другой путь – на основании линеаризации исходных нелинейных уравнений объекта. Рассмотрим нелинейное уравнение состояния
где X и F – векторы размерностью [n × 1], U – вектор размерностью [r × 1]. Пусть X0 – рабочая точка нелинейной системы n-го порядка, а U0 – постоянное значение входа, соответствующее этой точке. Предположим, что появляется отклонение:
Тогда
Для j-й компоненты вектора X можно записать:
Поскольку
Получаем
Для всех компонентов вектора X:
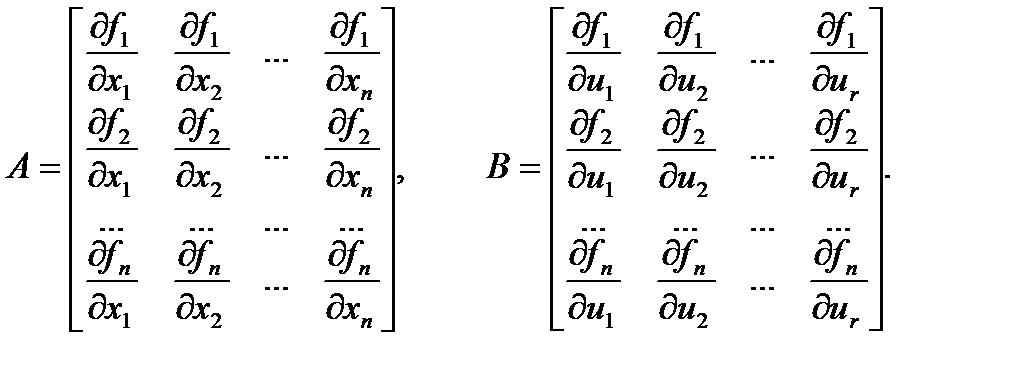
где
Эти матрицы называются якобианами. Для удобства записи обычно вместо DX используют X, и вместо DU – U:
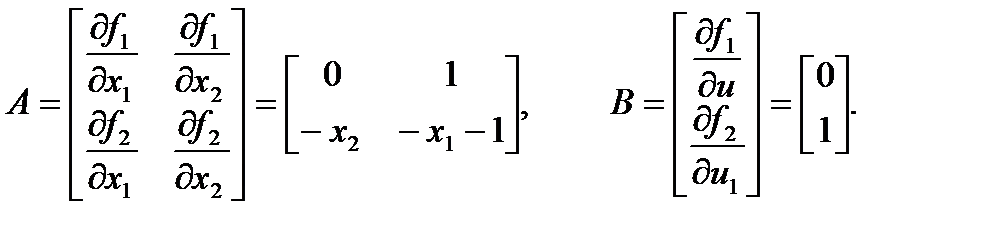
где под X понимаются отклонения переменных состояния от их установившихся значений, а под U – отклонения входных воздействий. Рассмотрим пример линеаризации нелинейной системы. Пусть дано нелинейное дифференциальное уравнение 2-го порядка.
где все переменные являются функциями времени. Введем переменные состояния:
Нелинейные уравнения состояния примут вид:
В векторной форме:
Рассмотрим аппроксимацию этих нелинейных уравнений в рабочей точке X0, U0.
1.2. Структурные преобразования в пространстве состояний
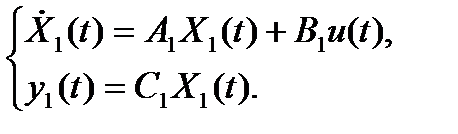
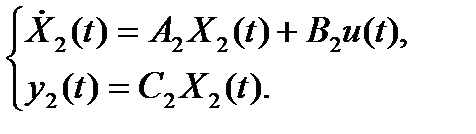
Рассмотрим соединение двух подсистем, описываемых в пространстве состояний, в одну. Предполагается, что обе подсистемы описываются соотношениями:
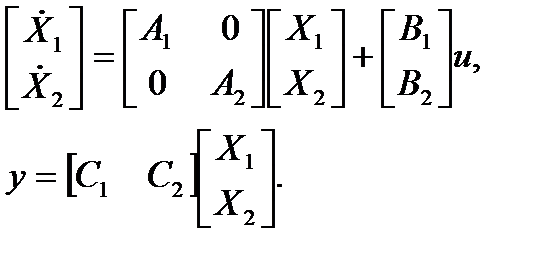
Параллельное соединение подсистем показано на рис. 1.4.
Рис. 1.4. Параллельное соединение подсистем
Для параллельного соединения:
Последовательное соединение подсистем показано на рис. 1.5.
Рис. 1.5. Последовательное соединение подсистем
Для последовательного соединения:
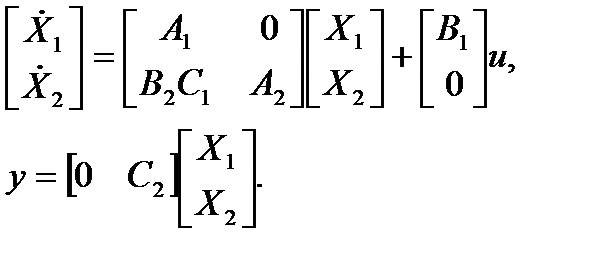
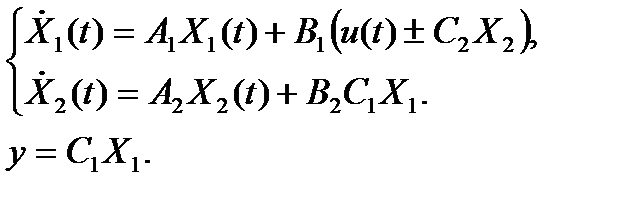
Соединение с обратной связью показано на рис. 1.6.
Рис. 1.6. Cоединение подсистем с обратной связью
Для рис. 1.6 справедливо
В матричном виде:
Фундаментальная матрица состояния
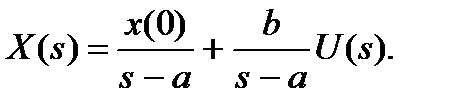
Рассмотрим скалярное дифференциальное уравнение 1-го порядка
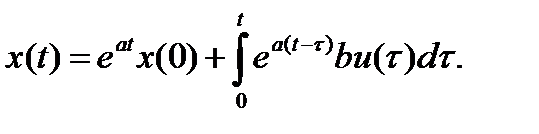
где a и b – числа, x и u – скалярные переменные. Преобразование этого уравнения по Лапласу дает
Обратное преобразование Лапласа этого уравнения дает
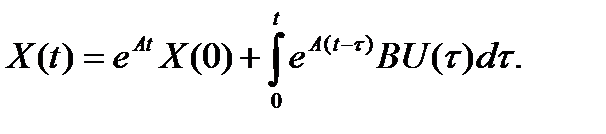
Это формула обобщается для системы произвольного вида
Введем обозначение
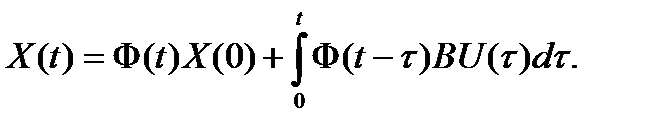
Тогда
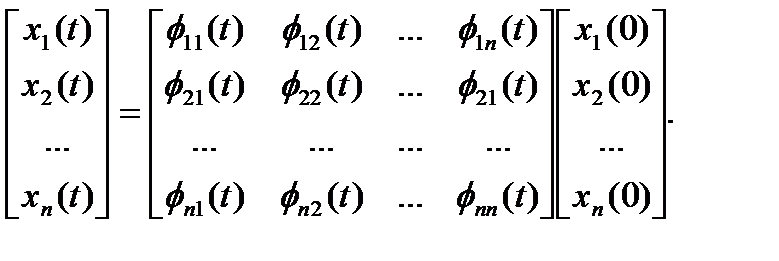
Таким образом, матричная экспоненциальная функция Ф(t) описывает свободное движение системы. Она называется фундаментальной матрицей или переходной матрицей состояния. Если U = 0, то происходит свободное движение системы, т.е. X(t) = Ф(t)X(0). В развернутом виде можно записать
Здесь φ ij(t) представляет собой реакцию i-й переменной состояния на начальное значение j-й переменной состояния при условии, что начальные значения всех остальных переменных состояния равны 0. Определим выходной сигнал системы, используя преобразование Лапласа. Для этого матричную запись уравнений состояния
Преобразуем это уравнение по Лапласу и получим окончательный результат в матричной форме
Где вектор начальных условий
Выразим вектор состояния через остальные переменные:
Тогда вектор состояния X(t) будет обратным преобразованием Лапласа от X(s) . Общее решение матричного уравнения определятся через фундаментальную матрицу Ф(t): Ф(t) = L-1{(sI – A)-1}. Заметим, что для системы n-го порядка фундаментальная матрица имеет размерность ( Пример 1.6. Дана матрица системы
Требуется найти фундаментальную матрицу. Решение.
Присоединенная матрица
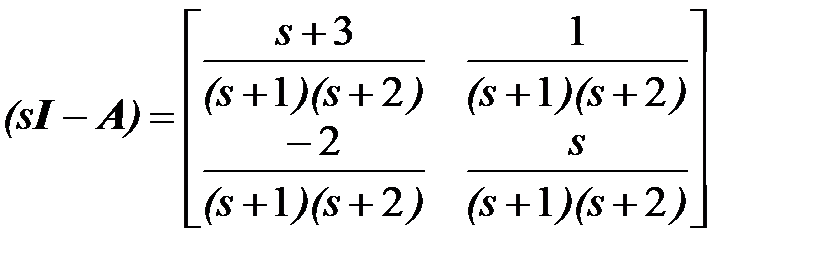
и вычислим определитель
Тогда обратная матрица будет получена путем деления присоединенной матрицы на определитель
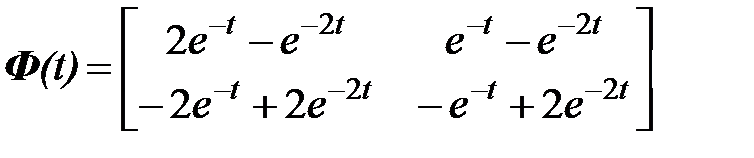
Фундаментальную матрицу получим с помощью обратного преобразования Лапласа
Программа MatLab позволяет выполнить эти преобразования более экономно
|
Последнее изменение этой страницы: 2017-03-14; Просмотров: 542; Нарушение авторского права страницы












 ). Обратное преобразование Лапласа для матрицы определяется путем применения обратного преобразования к каждому элементу этой матрицы.
). Обратное преобразование Лапласа для матрицы определяется путем применения обратного преобразования к каждому элементу этой матрицы.

 .
. .
. .
. .
.