|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Помехи и отказы в работе RC-аппаратурыСтр 1 из 5Следующая ⇒
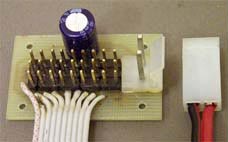
Помехи и отказы в работе RC-аппаратуры Предлагаю подробно поговорить о том, что частенько приводит к гибели модели. Думаю, эта тема интересует многих (если не всех) моделистов. Уверен, что эффективно бороться с каким-либо явлением можно только после того, как будут ясны причины, порождающие это самое явление. Имею в виду не только радиопомехи различного свойства, но вообще любые отказы в работе RC-аппаратуры. Начнем с помех Итак, все помехи можно условно разделить на две группы (помехи, возникающие на стороне передатчика пока не рассматриваем). 1) Внешние (эфирные) помехи. К этим помехам относится огромное количество самых разнообразных помех, создаваемых всевозможными источниками: электрические разряды в атмосфере (которые, к тому же, могут возникать не только в грозу), ЛЭП, мощные промышленные и медицинские генераторы, вещательные, связные и специальные радиостанции, аппараты электросварки, тяговые двигатели электротранспорта, аппаратура радиоуправления вашего приятеля (и НЕприятеля тоже) и т.д., и т.п. Самые опасные виды таких источников те, которые работают не постоянно (их можно отследить еще на земле), и даже не с какой-то закономерной периодичностью (их можно просто вычислить статистически), а те, которые начинают излучать без всякого графика, но именно в то время, когда ваша модель только-только набрала достаточную высоту. Очевидно, что кардинально бороться с такими помехами, и с их источниками не возможно! И поэтому я не стану подробно анализировать ни эти помехи, ни создающие их источники. Единственная надежная защита от них - просто не летать там, где были зафиксированы хотя бы единичные случаи отказа RC-аппаратуры по внешней причине, выяснить и объяснить которую не удалось. 2) Бортовые помехи - те, которые возникают в электрических цепях приемной стороны. Здесь: приемник, рулевые машинки, тяговый (ходовой) электродвигатель, контроллер, соединительные провода и разъемы, выключатель питания и аккумуляторная батарея. Сразу замечу: практически никогда бортовые помехи не возникают, если все бортовые устройства исправны и работают в штатных режимах, а монтаж и взаимное расположение этих устройств выполнены с соблюдением определенных правил (об этом - ниже). Давайте так же все бортовые помехи, в свою очередь, разделим на пассивные и активные. Пассивными будем считать помехи, которые возникают внутри какого-либо устройства, и прямо не воздействуют на другие бортовые устройства. Разумеется, это не касается приемника - это устройство управляет работой всего бортового оборудования, и любые нарушения в его работе приводят к сбоям во всех остальных устройствах борта. Активными же будем считать такие помехи, которые возникают при работе устройства, и каким-либо способом (путем электромагнитной наводки или непосредственно по электрическим бортовым цепям) воздействуют на другие устройства. В самом приемнике активных помех обычно не возникает. Пассивные же помехи могут появиться в любой точке приемного тракта в результате нарушения контакта (плохая пайка) любой из деталей, микротрещины на печатной плате, механического повреждения (часто - не видимого невооруженным глазом) какой-либо детали, плохого механического контакта между металлизированными керамическими пластинами внутри фильтра ПЧ, а также каких-либо повреждений канального кварца или кварца первого гетеродина приемника с двойным преобразованием. Все эти причины могут иметь постоянных характер, и тогда достаточно легко устранимы опытным специалистом, а могут проявляться периодически, допустим, от вибраций двигателя только на конкретных оборотах (механический резонанс), или при перегрузках по какой-то одной или сразу по нескольким координатам, что очень сильно затруднит поиск неисправности. Помеха от такого повреждения может иметь самые разные последствия: постоянный (полный или частичный), или периодический отказ всего борта или только одного конкретного канала. Разумеется, выявлять или прогнозировать подобные случаи " до того, как" весьма сложно, но можно. Для этого необходимо систематически проверять работу аппаратуры " на земле" не только перед полетом (это - обязательно! ), но и в условиях " моделки" (или дома), пытаясь спровоцировать подобную ситуацию - потряхивая бортовое оборудование или, соблюдая осторожность, тихонько постукивая по корпусу приемника, или иного бортового устройства, пластмассовой ручкой отвертки. Устранение выявленной неисправности ФПЧ, кварца или любой детали - только путем замены на новую, микротрещину или непропай выявить сложнее, но устранить проще и дешевле. Разумеется, эти же меры контроля касаются и других бортовых устройств - РМ, контроллера, и т.д. Рулевые машинки, и тем более - ходовой двигатель - наиболее вероятные источники активных бортовых помех. Как я уже писал выше, чаще всего активные помехи возникают в узле " коллектор-щетки". Но в РМ могут возникать и пассивные помехи, характерные для приемника. Учитывая, что нагрузкой электроники РМ является электродвигатель, пусть и маломощный, очевидно, что уровень активных помех от этого устройства в целом может быть достаточно велик. Воздействие на РМ любой помехи (как внешней - от приемника, так и внутренней пассивной) чаще всего приводит к переходу ее электромотора в постоянный хаотичный " старт-стопный" режим работы, что, в свою очередь, отрицательно влияет на цепи питания (возникают лишние скачки тока), более активно изнашиваются коллектор и щетки, усиливается искрение этого узла, и т.д. Мало того, что начинает " дурковать" сама машинка, но наведенная от нее электромагнитная помеха или помеха, " просочившаяся" от нее в приемник по соединительным проводам, может нарушить нормальный режим работы всего приемного тракта, что уже гораздо хуже. Еще одна, очень вероятная причина возникновения в РМ пассивных помех - износ переменного резистора датчика угла поворота выходного вала. Так как основную часть рабочего времени РМ большинства каналов (пожалуй, кроме канала газа) находятся в нейтрали, но при этом все-таки совершают микродвижения, компенсирующие отклонения рулей под внешними воздействиями, в наибольшей степени изнашивается участок резистивного слоя именно в том месте, которое соответствует положению " нейтрали" РМ. Для предупреждения такого износа и продления срока службы всей РМ можно рекомендовать время от времени изменять на 1-2 мм длину тяги от этой РМ, а изменение положения рулевой поверхности компенсировать с помощью триммера передатчика. Правда, при этом следует внимательно контролировать работу машинки при максимальных отклонениях, и не допускать никаких механических " упоров" и заеданий рулей. Электронный выключатель Еще осенью собрал несколько электронных выключателей для моделей, таких, как описывал ранее, но все никак не мог сделать фотографии. На плате размером 35х22 мм разместились: электронный выключатель, способный легко коммутировать ток до 10 Ампер, 8 разъемов для подключения рулевых машинок (9-ый разъем служит для подключения внешнего гнезда подзарядки и выключающей колодочки с сигнальным флажков), фильтр развязки питания приемника и специальный разъем для подключения бортового аккумулятора. Устройство соединяется с приемником 10-жильным ленточным кабелем: 8 жил (8 каналов) - сигналы управления на РМ, и 2 жилы - питание на приемник, подающееся после развязывающего фильтра, предохраняющего от " просадок" бортового напряжения. Каждая из 8-ми бортовых РМ может быть подключена к любому из 8-ми каналов, а выносное гнездо, подключаемое к 9-му разъему выполняет сразу 2 функции: 1) при вставлении в него ответной части разъема с " закороткой" выключается питание всего борта; 2) к этому же гнезду можно подключать внешнее зарядное устройство, что очень удобно в полевых условиях. Мощный разъем аккумулятора способен без потерь коммутировать ток до 5-8 Ампер.
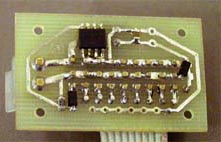
Электронный выключатель. Вид со стороны разъемов и со стороны SMD-монтажа Итак, фатальные отказы. В абсолютном большинстве случаев можно предотвратить любой фатальный электрический отказ аппаратуры. Для этого просто нужно понимать, что, и в какой ситуации может выйти из строя внутри маленького " черного" ящика, будь то приемник, или рулевая машинка. Любое радиоэлектронное устройство состоит из множества отдельных элементов - полупроводниковых диодов, транзисторов и микросхем, а также конденсаторов, резисторов и индуктивностей. Каждый из этих элементов обязательно характеризуется двумя-тремя параметрами - рабочим напряжением, максимальным током и/или рассеиваемой мощностью. Остальные электрические параметры нас сейчас не интересуют. Полупроводники. Большинство полупроводниковых деталей, применяемых в RC-конструкциях, можно считать элементами со стандартизированными параметрами. Это значит, что никаких особых требований к их параметрам не предъявляется. Максимальное рабочее напряжение транзисторов и диодов, как правило, не менее 15-20 вольт, что существенно больше, чем 5-7 вольт, которые вы хотите на них подать. Следовательно, пробоя " по напряжению" можно не опасаться. То же самое касается и микросхем - в RC-аппаратуре обычно применяются МС стандартных серий, которые изначально рассчитаны для работы в диапазоне питающих напряжений до 15-30 вольт, но уж никак не меньше, чем 10-12 вольт. Так что и здесь все в порядке. Даже специализированные МС, которые чаще всего устанавливаются в рулевые машинки, изготавливаются по стандартным технологиям, и как правило, безболезненно переносят увеличение напряжения питания в полтора-два раза. Если же в конструкции применяется специальная МС, рассчитанная на работу от низкого напряжения (допустим - микроконтроллер, большинство из которых работает от 3, 3 вольт), то в схеме обязательно будет встроенный интегральный стабилизатор напряжения, который обеспечит нормальную работу такой МС. Сам же интегральный стабилизатор тоже способен работать в очень широком диапазоне питающих напряжений (обычно до 27-30 вольт). Применяемые в микроэлектронике резисторы обычно рассчитаны на рабочие напряжения не менее 50-150 вольт, и очевидно, также не подвержены пробою " по напряжению". Индуктивности, даже предназначенные для SMD монтажа, не подвержены пробою при напряжениях до 80-150 вольт. Конденсаторы, применяемые RC-устройствах бывают, условно говоря, двух видов: обычные униполярные, и электролитические полярные. Обычные униполярные конденсаторы рассчитаны на работу при напряжениях не менее 100 вольт. Даже миниатюрные многослойные SMD-конденсаторы, предназначенные для печатного монтажа имеют минимальный предел рабочего напряжения не ниже 30-40 вольт, следовательно, тоже не могут выйти из строя по причине повышения напряжения питания до 5-7 вольт. Несколько сложнее обстоят дела с электролитическими емкостями. Во-первых, они полярные. Поэтому на их корпусе обязательно маркируется один из выводов - или " +" или " -". И подключаться такие конденсаторы должны с учетом этой маркировки. Кроме того, все электролиты рассчитаны на строго определенное напряжение питания, также указываемое на корпусе. Стандартный ряд питающих напряжений такой: 6, 3 вольт, 10 вольт, 16 вольт, 25 вольт и т.д. Естественно, что самые миниатюрные емкости рассчитаны на работу при минимальных напряжениях. Еще меньшие рабочие напряжения могут быть у SMD танталовых электролитов - такие выпускаются и для рабочих напряжений всего 4 вольта. Естественно, что почти двукратное превышение рабочего напряжение почти наверняка приведет к пробою " по напряжению" и выведет такую деталь из строя. Следовательно, прямому выходу из строя по причине повышения напряжения питания с 4, 8 до 6-7 вольт теоретически могут быть подвержены только электролитические конденсаторы. Для всех остальных элементов схемы такое повышение напряжения питания, при прочих нормальных условиях эксплуатации, можно считать допустимым, и не приводящим к фатальным отказам. Выводы Теперь можно подвести итоги, и сделать некоторые выводы. Итак, в результате увеличения количества элементов в аккумуляторе, максимальное/рабочее напряжение бортовой сети возрастет: до 7, 25/6, 0 вольт для 5 банок, В результате такой модернизации потенциально могут выйти из строя только электролитические конденсаторы в приемнике и в рулевых машинках, если их рабочее напряжение меньше 10, 0 вольт. Прямой опасности для остальных деталей и элементов схемы нет. Косвенно (в результате теплового пробоя) могут быть повреждены, прежде всего, микросхемы рулевых машинок. Кроме того, наверняка в целом сократится ресурс работы этих устройств, вследствие резкого увеличения потребляемой мощности и повышения механического износа. Надежность работы бортовых устройств может снизиться, в результате рассогласования уровней межкаскадных сигналов (не факт, но исключать этого я бы не стал). В наибольшей степени это касается 6-баночного варианта аккумулятора. Время работы борта от аккумулятора с бОльшим уровнем напряжения при прочих равных условиях (прежде всего - емкости акку) не только не увеличится, но может даже и сократиться, за счет полуторо-двукратного увеличения потребляемого тока. Повышенная токоотдача аккумулятора может сократить срок работы аккумулятора. Примерно в 1, 5 раза возрастет быстродействие рулевых машинок и развиваемое ими усилие на валу. Правда при резком сокращении их ресурса и эксплуатационной надежности. (Очевидно это единственный, но довольно спорный аргумент " за"...) На мой взгляд гораздо полезнее (как с технической, так и с экономической точки зрения) будет увеличение не напряжения бортовой батареи, а ее емкости - именно эта величина определяет время работы всех бортовых устройств. В том случае, если вам необходима бОльшая скорость работы (или мощность) рулевой машинки, то целесообразнее будет просто заменить ее на другую, фирменную, и с соответствующими параметрами, чем " выжимать" последние усилия из дешевой ширпотребной " китаянки". В настоящее время многие фирмы выпускают РМ, специально рассчитанные на работу от источника с повышенным напряжением, и такие машинки наверняка имеют цепи, согласующие уровни сигналов. Если же вы, руководствуясь какими-то сиюминутными мотивами все же решите использовать в нештатном режиме стандартную РМ, примите меры по предотвращению функциональных отказов по описанной выше причине. Проще всего сделать дополнительное согласующее устройство на обычной логической КМОП микросхеме, содержащей 4-6 элементов, лучше - НЕинвертирующих, еще лучше - с открытым выходом. В случае использования, допустим одной микросхемы 564ПУ6 вы сможете согласовать сразу 6 рулевых машинок. Эта микросхема содержит 6 неинвертирующих преобразователя уровня, и 2 контакта питания - низкий (со стабилизатора приемника) и высокий (непосредственно от аккумулятора). В крайнем случае можно использовать две последовательно-поэлементно включенные микросхемы, содержащие 4 любых логических элемента (ЛА, ЛР) с инвертирующим выходом, или 6 инвертирующих повторителей (ЛН, ПУ). Первая микросхема должна запитываться от цепей питания приемника, а вторая - от аккумулятора. Выбор микросхем сейчас очень велик, поэтому каждый сможет подобрать для себя оптимальный вариант.
Помехи и отказы в работе RC-аппаратуры Предлагаю подробно поговорить о том, что частенько приводит к гибели модели. Думаю, эта тема интересует многих (если не всех) моделистов. Уверен, что эффективно бороться с каким-либо явлением можно только после того, как будут ясны причины, порождающие это самое явление. Имею в виду не только радиопомехи различного свойства, но вообще любые отказы в работе RC-аппаратуры. Начнем с помех Итак, все помехи можно условно разделить на две группы (помехи, возникающие на стороне передатчика пока не рассматриваем). 1) Внешние (эфирные) помехи. К этим помехам относится огромное количество самых разнообразных помех, создаваемых всевозможными источниками: электрические разряды в атмосфере (которые, к тому же, могут возникать не только в грозу), ЛЭП, мощные промышленные и медицинские генераторы, вещательные, связные и специальные радиостанции, аппараты электросварки, тяговые двигатели электротранспорта, аппаратура радиоуправления вашего приятеля (и НЕприятеля тоже) и т.д., и т.п. Самые опасные виды таких источников те, которые работают не постоянно (их можно отследить еще на земле), и даже не с какой-то закономерной периодичностью (их можно просто вычислить статистически), а те, которые начинают излучать без всякого графика, но именно в то время, когда ваша модель только-только набрала достаточную высоту. Очевидно, что кардинально бороться с такими помехами, и с их источниками не возможно! И поэтому я не стану подробно анализировать ни эти помехи, ни создающие их источники. Единственная надежная защита от них - просто не летать там, где были зафиксированы хотя бы единичные случаи отказа RC-аппаратуры по внешней причине, выяснить и объяснить которую не удалось. 2) Бортовые помехи - те, которые возникают в электрических цепях приемной стороны. Здесь: приемник, рулевые машинки, тяговый (ходовой) электродвигатель, контроллер, соединительные провода и разъемы, выключатель питания и аккумуляторная батарея. Сразу замечу: практически никогда бортовые помехи не возникают, если все бортовые устройства исправны и работают в штатных режимах, а монтаж и взаимное расположение этих устройств выполнены с соблюдением определенных правил (об этом - ниже). Давайте так же все бортовые помехи, в свою очередь, разделим на пассивные и активные. Пассивными будем считать помехи, которые возникают внутри какого-либо устройства, и прямо не воздействуют на другие бортовые устройства. Разумеется, это не касается приемника - это устройство управляет работой всего бортового оборудования, и любые нарушения в его работе приводят к сбоям во всех остальных устройствах борта. Активными же будем считать такие помехи, которые возникают при работе устройства, и каким-либо способом (путем электромагнитной наводки или непосредственно по электрическим бортовым цепям) воздействуют на другие устройства. В самом приемнике активных помех обычно не возникает. Пассивные же помехи могут появиться в любой точке приемного тракта в результате нарушения контакта (плохая пайка) любой из деталей, микротрещины на печатной плате, механического повреждения (часто - не видимого невооруженным глазом) какой-либо детали, плохого механического контакта между металлизированными керамическими пластинами внутри фильтра ПЧ, а также каких-либо повреждений канального кварца или кварца первого гетеродина приемника с двойным преобразованием. Все эти причины могут иметь постоянных характер, и тогда достаточно легко устранимы опытным специалистом, а могут проявляться периодически, допустим, от вибраций двигателя только на конкретных оборотах (механический резонанс), или при перегрузках по какой-то одной или сразу по нескольким координатам, что очень сильно затруднит поиск неисправности. Помеха от такого повреждения может иметь самые разные последствия: постоянный (полный или частичный), или периодический отказ всего борта или только одного конкретного канала. Разумеется, выявлять или прогнозировать подобные случаи " до того, как" весьма сложно, но можно. Для этого необходимо систематически проверять работу аппаратуры " на земле" не только перед полетом (это - обязательно! ), но и в условиях " моделки" (или дома), пытаясь спровоцировать подобную ситуацию - потряхивая бортовое оборудование или, соблюдая осторожность, тихонько постукивая по корпусу приемника, или иного бортового устройства, пластмассовой ручкой отвертки. Устранение выявленной неисправности ФПЧ, кварца или любой детали - только путем замены на новую, микротрещину или непропай выявить сложнее, но устранить проще и дешевле. Разумеется, эти же меры контроля касаются и других бортовых устройств - РМ, контроллера, и т.д. Рулевые машинки, и тем более - ходовой двигатель - наиболее вероятные источники активных бортовых помех. Как я уже писал выше, чаще всего активные помехи возникают в узле " коллектор-щетки". Но в РМ могут возникать и пассивные помехи, характерные для приемника. Учитывая, что нагрузкой электроники РМ является электродвигатель, пусть и маломощный, очевидно, что уровень активных помех от этого устройства в целом может быть достаточно велик. Воздействие на РМ любой помехи (как внешней - от приемника, так и внутренней пассивной) чаще всего приводит к переходу ее электромотора в постоянный хаотичный " старт-стопный" режим работы, что, в свою очередь, отрицательно влияет на цепи питания (возникают лишние скачки тока), более активно изнашиваются коллектор и щетки, усиливается искрение этого узла, и т.д. Мало того, что начинает " дурковать" сама машинка, но наведенная от нее электромагнитная помеха или помеха, " просочившаяся" от нее в приемник по соединительным проводам, может нарушить нормальный режим работы всего приемного тракта, что уже гораздо хуже. Еще одна, очень вероятная причина возникновения в РМ пассивных помех - износ переменного резистора датчика угла поворота выходного вала. Так как основную часть рабочего времени РМ большинства каналов (пожалуй, кроме канала газа) находятся в нейтрали, но при этом все-таки совершают микродвижения, компенсирующие отклонения рулей под внешними воздействиями, в наибольшей степени изнашивается участок резистивного слоя именно в том месте, которое соответствует положению " нейтрали" РМ. Для предупреждения такого износа и продления срока службы всей РМ можно рекомендовать время от времени изменять на 1-2 мм длину тяги от этой РМ, а изменение положения рулевой поверхности компенсировать с помощью триммера передатчика. Правда, при этом следует внимательно контролировать работу машинки при максимальных отклонениях, и не допускать никаких механических " упоров" и заеданий рулей. |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 499; Нарушение авторского права страницы