|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Разложение определителя по элементам строки или столбцаСтр 1 из 2Следующая ⇒
Минор Минором При выписывании определителя (n-1)-го порядка, в исходном определителе элементы находящиеся под линиями в расчет не принимаются. Алгебраические дополнения Алгебраическим дополнением Аij элемента аij матрицы n-го порядка называется его минор, взятый со знаком, зависящий от номера строки и номера столбца: то есть алгебраическое дополнение совпадает с минором, когда сумма номеров строки и столбца – четное число, и отличается от минора знаком, когда сумма номеров строки и столба – нечетное число. Правило крамера Пусть дана система линейных уравнений, вида:
Число уравнений равно числу, неизвестных –х Система 2 наз.крамеровской системой если, определитель матрицы системы отличен от нуля Крамеровская система, имеет единственное решение, которое находится по формулам
5.элементарные преобразования системы линейных уравнений.решение систем линейных уравнений методом Гаусса
Идеи метода Гаусса, что с помощью элементарных преобразований система может быть приведена к равносильной системе, решение которой получается значительно проще.Методом гаусса может быть решена любая система уравнений.При выполнении элементарных преобразований работают не с уравнениями системы, а с расширенной матрицей системы. В результате этим методом получается один из 3 случаев:
Тогда система лин. уравнений имеет единственное решение. 6.обратная матрица. Обратимая матрица.критерий обратимости матрицы.правило нахождения обратной матрицы. Обра́ тная ма́ трица — матрица A-1 наз обратной матрицей к матрице A если выполняется равенство.
6. Матрица А наз. Обратимой, если для нее существует обратная матрица. Матрица наз. Невыражденной , если определитель, отличен от нуля. Теорема 1. для того чтобы матрица была обратима необходимо и достаточно, чтобы она была невыражденной. Теорема 2.если матрица А, является обратимой, то обратная матрица
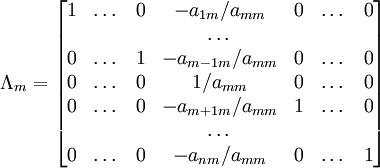
Способы нахождения обратной матрицы Если матрица обратима, то для нахождения обратной матрицы можно воспользоваться одним из следующих способов: Точные (прямые) методы Метод Гаусса—Жордана Возьмём две матрицы: саму A и единичную E. Приведём матрицу A к единичной матрице методом Гаусса—Жордана. После применения каждой операции к первой матрице применим ту же операцию ко второй. Когда приведение первой матрицы к единичному виду будет завершено, вторая матрица окажется равной A-1. При использовании метода Гаусса первая матрица будет умножаться слева на одну из элементарных матриц Λ i (трансвекцию или диагональную матрицу с единицами на главной диагонали, кроме одной позиции):
Вторая матрица после применения всех операций станет равна Λ, то есть будет искомой. Сложность алгоритма — O(n3). С помощью союзной матрицы
C * — союзная матрица; Полученная матрица A-1 и будет обратной. Сложность алгоритма зависит от сложности алгоритма расчета определителя Odet и равна O(n² )·Odet. Иначе говоря, обратная матрица равна единице, делённой на определитель исходной матрицы и умноженной на транспонированную матрицу алгебраических дополнений элементов исходной матрицы. -Векторная величина или вектор — это всякая величина, обладающая направлением. 10. Скалярная величина или скаляр — это всякая величина, не обладающая направлением. Если некоторая величина вполне определяется ее числовым значением, то ее называют скалярной. Примерами скалярных величин могут служить: масса, плотность, работа, сила тока, температура. Скаляры являются алгебраическими величинами и с ними можно производить любые алгебраические действия: сложение, вычитание, умножение, деление, возведение в степень и т. д. Если при определении некоторой величины для ее полной характеристики, кроме числового значения, надо знать и ее направление, то такая величина называется векторной, или вектором. Примерами векторных величин являются скорость, ускорение, сила. Длина вектора называется также его модулем, или абсолютной величиной. - Вектором называется направленный отрезок (или, что то же, упорядоченная пара точек).
Два н Два ненулевых вектора называются коллинеарными, если они лежат на одной прямой или на параллельных прямых. Коллинеарные векторы либо одинаково направлены, либо противоположно направлены.
Приз Призмы коллинеарности над векторами НЕТ…
Свойства проекции вектора 1. проекция суммы векторов какую либо ось = сумме проекций слагаемых векторов на эту ось. 2. 2 алгеброическая проекция вектора на какую либо ось = произведению блины вектора на cos угла между вектором и положит. Напр. Отрезком оси. Понятие евклидова пространства. Примеры.Неравенства Коши-Буняковского и треугольника. 1.Понятие евклидова пространства.Примеры: Будем говорить, что в вещественном пространстве R определено скалярное произведение, если каждой паре векторов Примеры: 1) Под векторами пространства R мы будем понимать векторы изучаемого в элементарной геометрии трехмерного пространства. Скалярное произведение векторов определим как произведение их длин на косинус угла между ними. Очевидно, что аксиомы 10-40 действительно выполнены. 2) Векторами пространства R назовем всякую систему n действительных чисел
Прямая на плоскости. а) направляющим вектором прямой l называется вектор, любое изображение котрого параллельно данной прямой. б) нормальным вектором прямой l называется вектор, изображение которого перпендикулярно данной прямой. 1)
Прямая на плоскости. а) направляющим вектором прямой l называется вектор, любое изображение котрого параллельно данной прямой. б) нормальным вектором прямой l называется вектор, изображение которого перпендикулярно данной прямой. 1)
Если Конические поверхности Поверхность S называется конической поверхностью с вершиной в точке O, если для любой точки M0 этой поверхности прямая, проходящая через M0 и O, целиком принадлежит этой поверхности.
Функция F(x, y, z) называется однородной порядка m, если
Цилиндрические поверхности
Поверхность S называется цилиндрической поверхностью с образующей
Теорема (об уравнении цилиндрической поверхности). Если в некоторой декартовой прямоугольной системе координат поверхность S имеет уравнение f(x, y) = 0, то S — цилиндрическая поверхность с образующей, параллельной оси OZ.
Кривая, задаваемая уравнением f(x, y) = 0 в плоскости z = 0, называется направляющей цилиндрической поверхности.
Если направляющая цилиндрической поверхности задаётся кривой второго порядка, то такая поверхность называется цилиндрической поверхностью второго порядка.
35.Полярная система координат — система координат, ставящая в соответствие каждой точке на плоскости пару чисел Координата ρ — расстояние от данной точки до полюса. В ряде источников обозначается буквой r. Координата Связь полярных координат с декартовыми (формулы перехода) от полярной системы координат к декартовой:
от декартовой системы координат к полярной:
36.Цилиндрической системой координат называют трёхмерную систему координат, являющуюся расширением полярной системы координат путём добавления третьей координаты (обычно обозначаемой z), которая задаёт высоту точки над плоскостью. Точка P даётся как
z равна аппликате точки P
При использовании в физических науках и технике международный стандарт ISO 31-11 рекомендует использовать обозначения Цилиндрические координаты удобны при анализе поверхностей, симметричных относительно какой-либо оси, если ось Z взять в качестве оси симметрии. Например, бесконечно длинный круглый цилиндр в прямоугольных координатах имеет уравнение x2 + y2 = c2, а в цилиндрических — очень простое уравнение ρ = c. Отсюда и идёт для данной системы координат имя «цилиндрическая». Вопрос Функция называется непрерывной на промежутке Х, если она непрерывна в каждой точке этого промежутка. Доказано, что все основные элементарные функции непрерывны на своей области определения. Свойства функций непрерывных на промежутке:
Теорема 1 Если у = f (x) – непрерывна на отрезке АВ, то она ограничена на отрезке АВ
Теорема 2 Если y = f (x) – непрерывна на [ab], то она принимает на этом отрезке наибольшее значение (М) и наименьшее значение (m)
Теорема 3 Если y = f (x) – непрерывна на [ab] и на концах отрезка принимает значение разных знаков, то тогда внутри отрезка [ab] найдется, по крайней мере, одна точка x = C, в которой функция обращается в ноль:
Вопрос 53. Точка Хо называется точкой разрыва y = f (x), если условия непрерывности в ней не выполняются Классификация: Точка Хо называется точкой разрыва 1го рода, если односторонние пределы при Х стремящемуся к Хо существуют. lim f (x) = b lim f (x) = c X-> Xo-0 X-> Xo+0 b=c – Хо точка устранимого разрыва b не равно с – Хо точка скачка
Точка Хо называется точкой разрыва 2го рода, если хотя бы один из односторонних пределов равен бесконечности или не существует.
Вопрос Предел отношения приращения функции к приращению аргумента, при Х стремящемуся к нулю, равен производной данной функции.
Пусть дельта Х-> 0, В-> A, секущая -> касательной. Тогда производная функции равна пределу отношения приращения функции к приращению аргумента, при дельта икс стремящемуся к нулю, равен тангенсу альфа и равен угловому коэффициенту касательной. Производная y = f (x) в точке Хо равна угловому коэффициенту касательной, проведенной к графику функции y = f (x) в точке (Хо; f (Хо)). Уравнение касательной: Y = Yo + f’(Xo) (X – Xo) Механический смысл производной
58. Производные шести тригонометрических функций и, соответственно, шести обратных тригонометрических функций определяются следующими формулами (рядом указана область определения каждой функции):
Известно, что
Таким образом получены все формулы для производных арксинуса, арккосинуса и других обратных функций, приведенных в таблице производных.
Если функция y = y(x) задана в параметрической форме Если функция Выясним механический смысл второй производной. (Механический смысл первой производной – скорость).Пусть материальная точка движется прямолинейно по закону s=s(t), где s – путь, проходимый точкой за время t. Тогда скорость vэтого движения есть v= s'(t) = v(t), т.е. тоже некоторая функция времени.В момент времени t скорость имеет значение v=v(t). Рассмотрим другой момент времени t+Δ t. Ему соответствует значение скорости v1 = v(t+Δ t). Следовательно, приращению времени Δ t соответствует приращение скорости Δ v= v1 – v = v(t + Δ t) – v(t). Отношение
Минор Минором При выписывании определителя (n-1)-го порядка, в исходном определителе элементы находящиеся под линиями в расчет не принимаются. Алгебраические дополнения Алгебраическим дополнением Аij элемента аij матрицы n-го порядка называется его минор, взятый со знаком, зависящий от номера строки и номера столбца: то есть алгебраическое дополнение совпадает с минором, когда сумма номеров строки и столбца – четное число, и отличается от минора знаком, когда сумма номеров строки и столба – нечетное число. Разложение определителя по элементам строки или столбца Рассмотрим квадратную матрицу A n-го порядка. Выберем i, j-ый элемент этой матрицы и вычеркнем i-ую строку и j-ый столбец. В результате мы получаем матрицу (n – 1)-го порядка, определитель которой называется минором элемента и обозначается символом Mi j:
Алгебраическое дополнение Ai, j элемента ai j определяется формулой Теорема о разложении определителя по элементам строки. Определитель матрицы A равен сумме произведений элементов строки на их алгебраические дополнения:
Теорема о разложении определителя по элементам столбца. Определитель матрицы A равен сумме произведений элементов столбца на их алгебраические дополнения:
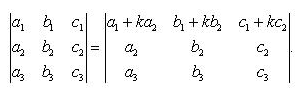
Теоремы о разложении определителя имеют важное значение в теоретических исследованиях. Они устанавливают, что проблема вычисления определителя n-го порядка сводится к проблеме вычисления n определителей (n –1)-го порядка. 3. Вычисление определителей основывается на их известных свойствах, которые относятся к определителям всех порядков. Вот эти свойства: 1. Если переставить две строки (или два столбца) определителя, то определитель изменит знак. 2. Если соответствующие элементы двух столбцов (или двух строк) определителя равны или пропорциональны, то определитель равен нулю. 3. Значение определителя не изменится, если поменять местами строки и столбцы, сохранив их порядок. 4. Если все элементы какой-либо строки (или столбца) имеют общий множитель, то его можно вынести за знак определителя. 5. Значение определителя не изменится, если к элементам одной строки (или столбца) прибавить соответствующие элементы другой строки (или столбца), умноженные на одно и то же число. Для определителей третьего порядка это свойство может быть записано, например, так:
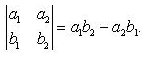
6. Определитель второго порядка вычисляется по формуле
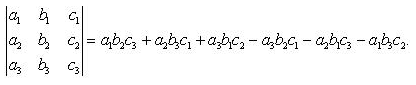
7. Определитель третьего порядка вычисляется по формуле
Существует удобная схема для вычисления определителя третьего порядка (см. рис. 1 и рис. 2).
По схеме, приведенной на рис. 1, произведения соединеных элементов берутся со своим знаком, а по схеме рис. 2 - с обратным. Величина определителя равна алгебраической сумме полученных шести произведений.
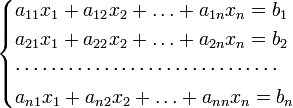
4.системы линейных уравнений, основные понятия.правило Крамера. Основные понятия Системой линейных алгебраических уравнений, содержащей m уравнений и n неизвестных, называется система вида
где числа aij называются коэффициентами системы, числа bi— свободными членами. Подлежат нахождению числа xn. Такую систему удобно записывать в компактной матричной форме AX=B Здесь А — матрица коэффициентов системы, называемая основной матрицей;
Произведение матриц А*Х определено, так как в матрице А столбцов столько же, сколько строк в матрице Х (n штук). Расширенной матрицей системы называется матрица A системы, дополненная столбцом свободных членов
Решением системы называется n значений неизвестных х1=c1, x2=c2, ..., xn=cn, при подстановке которых все уравнения системы обращаются в верные равенства. Всякое решение системы можно записатьв виде матрицы-столбца
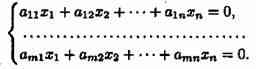
Система уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной, если она не имеет ни одного решения. Совместная система называется определенной, если она имеет единственное решение, и неопределенной, если она имеет более одного решения. В последнем случае каждое ее решение называется частным решением системы. Совокупность всех частных решений называется общим решением. Решить систему — это значит выяснить, совместна она или несовместна. Если система совместна, найти ее общее решение. Две системы называются эквивалентными (равносильными), если они имеют одно и то же общее решение. Другими словами, системы эквивалентны, если каждое решение одной из них является решением другой, и наоборот. Эквивалентные системы получаются, в частности, при элементарных преобразованиях системы при условии, что преобразования выполняются лишь над строками матрицы. Система линейных уравнений называется однородной, если все свободные члены равны нулю:
Однородная система всегда совместна, так как x1=x2=x3=...=xn=0 является решением системы. Это решение называется нулевым или тривиальным. Правило крамера Пусть дана система линейных уравнений, вида:
Число уравнений равно числу, неизвестных –х Система 2 наз.крамеровской системой если, определитель матрицы системы отличен от нуля Крамеровская система, имеет единственное решение, которое находится по формулам
5.элементарные преобразования системы линейных уравнений.решение систем линейных уравнений методом Гаусса
Идеи метода Гаусса, что с помощью элементарных преобразований система может быть приведена к равносильной системе, решение которой получается значительно проще.Методом гаусса может быть решена любая система уравнений.При выполнении элементарных преобразований работают не с уравнениями системы, а с расширенной матрицей системы. В результате этим методом получается один из 3 случаев:
Тогда система лин. уравнений имеет единственное решение. 6.обратная матрица. Обратимая матрица.критерий обратимости матрицы.правило нахождения обратной матрицы. Обра́ тная ма́ трица — матрица A-1 наз обратной матрицей к матрице A если выполняется равенство.
6. Матрица А наз. Обратимой, если для нее существует обратная матрица. Матрица наз. Невыражденной , если определитель, отличен от нуля. Теорема 1. для того чтобы матрица была обратима необходимо и достаточно, чтобы она была невыражденной. Теорема 2.если матрица А, является обратимой, то обратная матрица
|
Последнее изменение этой страницы: 2017-03-14; Просмотров: 750; Нарушение авторского права страницы
 элемента
элемента  матрицы n-го порядка называется определитель матрицы (n-1)-го порядка, полученный из матрицы А вычеркиванием i-й строки и j-го столбца.
матрицы n-го порядка называется определитель матрицы (n-1)-го порядка, полученный из матрицы А вычеркиванием i-й строки и j-го столбца.

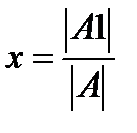
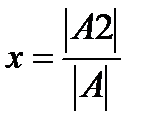
 где
где -определитель полученный из определителя матрицы А, с заменой
-определитель полученный из определителя матрицы А, с заменой  -того столбца, на столбец свободного члена
-того столбца, на столбец свободного члена

 , находится по формуле:
, находится по формуле:  , где det обозначает определитель.
, где det обозначает определитель. .
. .
.
 (точка A - начало вектора, точка В - конец вектора) или одной буквой -
(точка A - начало вектора, точка В - конец вектора) или одной буквой -  .
. поставлено в соответствие действительное число, которое обозначим через
поставлено в соответствие действительное число, которое обозначим через  причем это соответствие обладает следующими свойствами (удовлетворяет следующим аксиомам): 10
причем это соответствие обладает следующими свойствами (удовлетворяет следующим аксиомам): 10  , т.е. скалярное произведение симметрично. 20,
, т.е. скалярное произведение симметрично. 20,  где
где  -- действительное число.30
-- действительное число.30  (дистрибутивность скалярного произведения).40 Скалярное произведение вектора с самим собой неотрицательно:
(дистрибутивность скалярного произведения).40 Скалярное произведение вектора с самим собой неотрицательно:  , и обращается в нуль, лишь если
, и обращается в нуль, лишь если  .Аффинное пространство, в котором определено скалярное произведение, удовлетворяющее условиям 10-40, мы называем евклидовым.
.Аффинное пространство, в котором определено скалярное произведение, удовлетворяющее условиям 10-40, мы называем евклидовым. . Сложение векторов и умножение их на число определим так:
. Сложение векторов и умножение их на число определим так: 
 , где
, где Скалярное произведение векторов x и y определим формулой
Скалярное произведение векторов x и y определим формулой  Легко проверить, что аксиомы 10-30 действительно выполнены. Аксиома 40 также справедлива, так как
Легко проверить, что аксиомы 10-30 действительно выполнены. Аксиома 40 также справедлива, так как  и
и  только при
только при  3) Векторами пространства R мы будем называть непрерывные функции, заданные на интервале (a, b); скалярное произведение таких функций определим как интеграл их произведения
3) Векторами пространства R мы будем называть непрерывные функции, заданные на интервале (a, b); скалярное произведение таких функций определим как интеграл их произведения  . 4) Будем считать векторами многочлены от t степени не выше n-1. Скалярное произведение двух многочленов определим как и в предыдущем примере:
. 4) Будем считать векторами многочлены от t степени не выше n-1. Скалярное произведение двух многочленов определим как и в предыдущем примере: 
 ) вектор q=
) вектор q=  , Возьмём текущую т. Прямой М(х, у)
, Возьмём текущую т. Прямой М(х, у) =
=  ;
;  , тогда по усл.Калинеарности:
, тогда по усл.Калинеарности:  -параметрические ур-я прямой
-параметрические ур-я прямой  (2)-каноническое ур-е прямой
(2)-каноническое ур-е прямой выполняется следующее:
выполняется следующее: 
 , если для любой точки M0 этой поверхности прямая, проходящая через эту точку параллельно образующей
, если для любой точки M0 этой поверхности прямая, проходящая через эту точку параллельно образующей  . Основными понятиями этой системы являются точка начала координат (полюс) и фиксированный луч, начинающийся в этой точке (полярная ось).
. Основными понятиями этой системы являются точка начала координат (полюс) и фиксированный луч, начинающийся в этой точке (полярная ось). — угол между полярной осью и отрезком, соединяющим полюс и рассматриваемую точку. Координата берётся со знаком «+», если угол от оси до отрезка вычисляется против часовой стрелки, и со знаком «-» в противоположном случае. Для полюса ρ = 0, угол
— угол между полярной осью и отрезком, соединяющим полюс и рассматриваемую точку. Координата берётся со знаком «+», если угол от оси до отрезка вычисляется против часовой стрелки, и со знаком «-» в противоположном случае. Для полюса ρ = 0, угол  определяют одну и ту же точку плоскости.
определяют одну и ту же точку плоскости.




 . В терминах прямоугольной системы координат:
. В терминах прямоугольной системы координат:  расстояние от O до P', ортогональной проекции точки P на плоскость XY. Или то же самое, что расстояние от P до оси Z.
расстояние от O до P', ортогональной проекции точки P на плоскость XY. Или то же самое, что расстояние от P до оси Z. — угол между осью X и отрезком OP'.
— угол между осью X и отрезком OP'.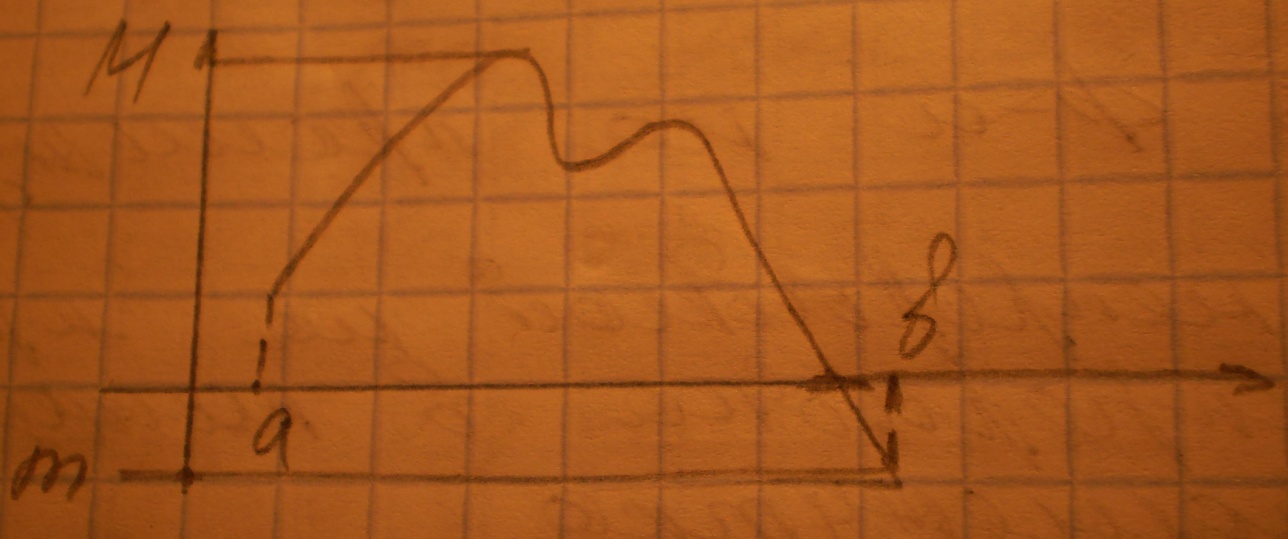
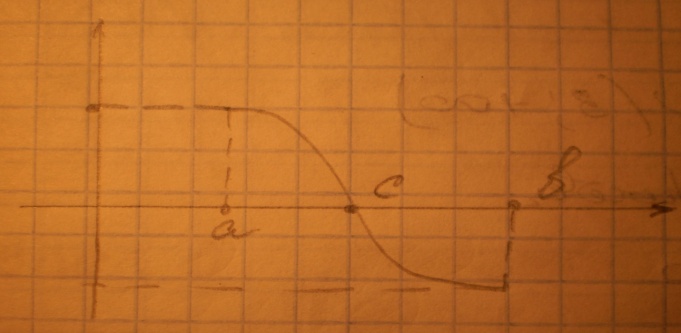 f (C) = 0, где a < C< b
f (C) = 0, где a < C< b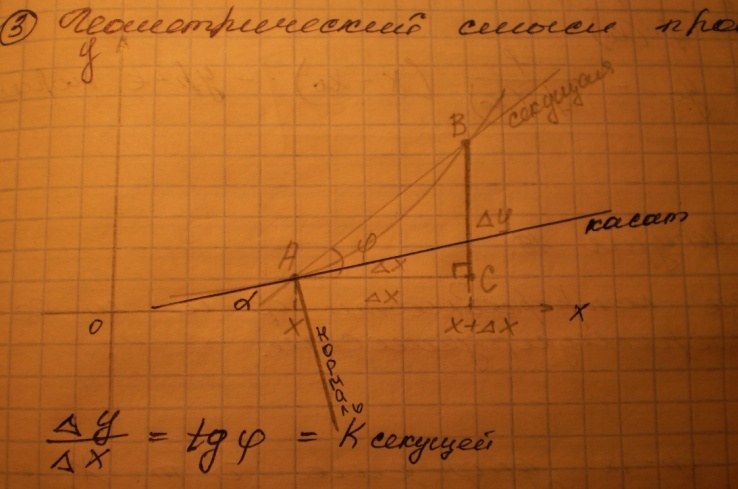





 59. Найти формулу для производной функции arctg. Функция arctg является функцией, обратной функции tg, т.е. ее производная может быть найдена следующим образом:
59. Найти формулу для производной функции arctg. Функция arctg является функцией, обратной функции tg, т.е. ее производная может быть найдена следующим образом:  По приведенной выше формуле получаем:
По приведенной выше формуле получаем: 
 Т.к.
Т.к.  то можно записать окончательную формулу для производной арктангенса:
то можно записать окончательную формулу для производной арктангенса: 


 60. При вычислении производной неявной функции воспользуемся правилом дифференцирования сложной функции. Продифференцируем уравнение:
60. При вычислении производной неявной функции воспользуемся правилом дифференцирования сложной функции. Продифференцируем уравнение:  . Отсюда получим формулу для производной функции, заданной неявно:
. Отсюда получим формулу для производной функции, заданной неявно:  . Таким же способом нетрудно получить формулы для частных производных функции нескольких переменных, заданной неявно, например, уравнением:
. Таким же способом нетрудно получить формулы для частных производных функции нескольких переменных, заданной неявно, например, уравнением:  (t) и (t)—дифференцируемые функции и '(t ) не равно 0, то производная '(x) вычисляется по формуле '(x)= '(t)/ '(t)
(t) и (t)—дифференцируемые функции и '(t ) не равно 0, то производная '(x) вычисляется по формуле '(x)= '(t)/ '(t) дифференцируема при всех
дифференцируема при всех  , то мы можем рассмотреть функцию
, то мы можем рассмотреть функцию  , сопоставляющую каждой точке
, сопоставляющую каждой точке  значение производной
значение производной  . Эта функция
. Эта функция  называется производной функции
называется производной функции  , или первой производной от
, или первой производной от  .) Функция
.) Функция  , в свою очередь, может иметь производную во всех (или некоторых) точках
, в свою очередь, может иметь производную во всех (или некоторых) точках  , которую мы обозначим
, которую мы обозначим  и назовём второй производной функции
и назовём второй производной функции  существует во всех точках
существует во всех точках  , называемую третьей производной функции
, называемую третьей производной функции  -й производной функции
-й производной функции  -й производной
-й производной  ,
,  если эта производная существует.
если эта производная существует.  первую, вторую и третью производные принято обозначать штрихами:
первую, вторую и третью производные принято обозначать штрихами:  или
или  ; при прочих
; при прочих  или
или  .
. называется средним ускорением за промежуток времени Δ t.Ускорением в данный момент времени t называется предел среднего ускорения при Δ t→ 0:
называется средним ускорением за промежуток времени Δ t.Ускорением в данный момент времени t называется предел среднего ускорения при Δ t→ 0:  .Таким образом, ускорение прямолинейного движения точки есть производная скорости по времени. Но как мы уже видели, скорость есть производная пути s по времени t: v = s'. Учитывая это, имеем: a = v'(t) = (s')' = s''(t), т.е. ускорение прямолинейного движения точки равно 2-й производной пути по времени a = S''(t).
.Таким образом, ускорение прямолинейного движения точки есть производная скорости по времени. Но как мы уже видели, скорость есть производная пути s по времени t: v = s'. Учитывая это, имеем: a = v'(t) = (s')' = s''(t), т.е. ускорение прямолинейного движения точки равно 2-й производной пути по времени a = S''(t).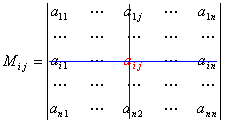






 — вектор-столбец из неизвестных xj.
— вектор-столбец из неизвестных xj. — вектор-столбец из свободных членов bi.
— вектор-столбец из свободных членов bi.