
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Шихтовка железа стержневого трансформатораСтр 1 из 15Следующая ⇒
Оглавление
I Трансформаторы……………………………………………..………………………...…6 1.1. Устройство трансформатора…………………………………………………….…..6 1.1.1. Шихтовка железа стержневого трансформатора………………………….…..6 1.2.Однофазные трансформаторы. Холостой ход однофазного трансформатора.…...7 1.2.1.Ток холостого хода……………….…………………………………………..….7 1.2.2.Потери при холостом ходе трансформатора………………………………..….8 1.2.3.Схема замещения трансформатора при холостом ходе………………….…....8 1.2.4.Определение параметров экспериментально zm, xm, rm…………………..…..9 1.3. Работа однофазного трансформатора под нагрузкой…………………………..…..9 1.3.1 Физические процессы в трансформаторе при нагрузке………………….……10 1.3.2. Векторная диаграмма трансформатора при нагрузке………………………...10 1.3.3.Схема замещения трансформатора при нагрузке………………………….…..11 1.4. Режим короткого замыкания однофазного трансформатора…………………..…..12 1.4.1. Векторная диаграмма трансформатора при коротком замыкании………..…12 1.4.2. Потери при коротком замыкании………………………………………………13 1.4.3. Экспериментальное определение параметров короткого замыкания……….13 1.4.4. Треугольник короткого замыкания……………………………………………13 1.5. Совмещение режимов……………………….……………………………………….14 1.6. Трехфазные трансформаторы……………………….………………………….…...16 1.6.1. Группы соединения трансформаторов…………………………………….…..17 1.7. Холостой ход трехфазного трансформатора……………………………………….18 1.7.1. Групповой трансформатор……………………….………………………….…20 1.7.2. Трехстержневой трансформатор……………………….………………………20 1.8. Параллельная работа трансформаторов………………………………………….…20 1.8.1. Параллельная работа трансформаторов при неравенстве коэффициентов трансформации………………………………………………..…………………….…21 1.8.2. Параллельная работа трансформаторов при неравенстве напряжений короткого замыкания…..……….……………………….………………………….…22 1.8.3. Параллельная работа трансформаторов с различными группами соединения……………………………………………………………………………..22 1.9. Переходные режимы трансформаторов……………………….……………………23 1.9.1. Переходный процесс при включении трансформатора в холостую……...…23 1.9.2. Переходный процесс при коротком замыкании трансформатора……….…..25 1.9.3. Переходные процессы, вызванные перенапряжением……………………..…26 II Асинхронные машины…………………………………………………………….….…29 2.1. Устройство и принцип действия асинхронного двигателя…………………….…29 2.1.1. Принцип создания вращающего магнитного поля статорной обмоткой……29 2.1.2. Принцип действия асинхронного двигателя………………………………..…29 2.2. Общие вопросы машин переменного тока…………………………………….……30 2.2.1. Обмотки машин переменного тока……………………….……………………30 2.2.2. Электродвижущая сила (ЭДС) обмотки машин переменного тока…….……34 2.2.3. Намагничивающая сила обмоток машин переменного тока…………………37 2.3. Рабочий процесс асинхронного двигателя…………………………………….……42 2.3.1. Режимы работы асинхронной машины……………………………………..….42 2.3.2. Режим двигателя……………………….……………………………………..…43 2.3.3. Трехфазная асинхронная машина при вращающемся роторе……………..…43 2.3.4. Привидение параметров роторной обмотки к статорной………………….…45 2.3.5. Приведение асинхронного двигателя к эквивалентному трансформатору.…46 2.3.6. Схема замещения роторной цепи……………………….……………………...46 2.3.7. Векторная диаграмма асинхронного двигателя……………………………....46 2.3.8. Схемы замещения асинхронной машины……………………………….…...…47 2.4. Вращающий момент асинхронной машины…………………………………………49 2.4.1. Вращающий (электромагнитный) момент асинхронной машины……….….49 2.4.2. Максимальный (критический) момент. ………………………………….……52 2.4.3. Расчетная формула момента. ……………………………………………….….52 2.4.4. Влияние высших гармоник магнитного поля на работу асинхронной машины……………………….……………………….………………………….…..…53 2.5. Круговая диаграмма асинхронной машины……….………………………….…..…55 2.6. Пуск трехфазных асинхронных двигателей…………………………………….…..57 2.6.1. Пуск под номинальным напряжением (прямой пуск) ……………………….58 2.6.2. Пуск при пониженном напряжении………………………………………...….58 2.6.3. Пуск двигателя с фазным ротором……………………………………………..59 2.7. Асинхронные двигатели с обмоткой ротора специального исполнения………….60 2.7.1. Короткозамкнутый асинхронный двигатель с глубоким пазом на роторе….60 2.7.2. Короткозамкнутый асинхронный двигатель с двойной клеткой на роторе…62 2.8. Регулирование частоты вращения асинхронных двигателей…………………...…64 2.8.1. Регулирование частоты вращения двигателя изменением частоты…………64 2.8.2. Регулирование частоты вращения двигателя путем изменения числа пар полюсов………………………………………………………………………………...65 2.8.3. Регулирование частоты вращения двигателя сопротивлением в цепи ротора (с фазным ротором) ……………………….……………………………….….67 2.8.4. Регулирование частоты вращения изменением подводимого напряжения....67 2.9. Асинхронная машина в качестве генератора………………………………….……67 2.9.1. Векторная диаграмма асинхронного генератора…………………………...…68 2.9.2. Однофазный двигатель……………………….…………………………………68 III Машины постоянного тока ……………………….………………………………...….71 3.1. Устройство и принцип действия машин постоянного тока………………….….…71 3.2. Обмотки якоря машин постоянного тока……………………………………………72 3.2.1. Простая петлевая обмотка……………………….…………….…………..……73 3.2.2. Простая волновая обмотка……………………….……………………………..74 3.2.3. Сложно-петлевая обмотка……………………….……………………….……..75 3.2.4. Сложно-волновые обмотки……………………….…………………….…..…..76 3.2.5. Симметрия обмоток……………………….……………………………….……76 3.2.6. Смешанная (лягушечная) обмотка……………………………………………..78 3.3. ЭДС обмотки якоря………………………………………………………………..….78 3.4. Реакция якоря в машинах постоянного тока………………………………….…….79 3.5. Генераторы постоянного тока……………………….……………………………...81 3.5.1. Генератор независимого возбуждения…………………………………………82 3.5.2. Генератор параллельного возбуждения…………………………………….….83 3.5.3. Генератор последовательного возбуждения………………………………..…84 3.5.4. Генератор смешанного возбуждения……………………………………..……85 3.6. Двигатели постоянного тока……………………….………………………………..86 3.6.1. Энергетическая диаграмма двигателя постоянного тока……………………..86 3.6.2. Пуск двигателей постоянного тока…………………………………………….87 3.6.3. Реверсирование двигателя постоянного тока………………………………….88 3.6.4. Классификация двигателей постоянного тока………………………………...88 3.6.5. Регулирование частоты вращения двигателей постоянного тока……………91 3.7. Коммутация двигателя……………………….………………………………………94 3.7.1 Закон изменения тока в коммутируемой секции………………………..….….96 3.7.2. Прямолинейная коммутация……………………….………………………..…97 3.7.3. Замедленная коммутация……………………….…………………………..….98 3.7.4. Ускоренная коммутация……………………….……………………………….99 3.7.5. Определение реактивной ЭДС-er……………………….………………..……100 3.7.6. Способы улучшения коммутации……………………….…………………..…101 3.7.7. Круговой огонь в машинах постоянного тока……………………………...…104 IV Синхронные машины ……………………………………………………….…….……106 4.1. Назначение, устройство и принцип действия………………………………………106 4.2. Работа генератора при холостом ходе………………………………………………107 4.3. Реакция якоря в синхронном явнополюсном генераторе………………….………107 4.3.1. Реакция якоря при активной нагрузке…………………………………………108 4.3.2. Реакция якоря при индуктивной нагрузке…………………………….……....108 4.3.3. Реакция якоря при емкостной нагрузке………………………………………..109 4.3.4. Реакция якоря при смешанной нагрузке………………………………………110 4.4. Магнитное рассеяние…………………………………………………………...……110 4.5. Рабочий процесс синхронной машины……………………………………….…...…111 4.5.1. Основная диаграмма ЭДС явнополюсного синхронного генератора………...111 4.5.2. Преобразованная диаграмма ЭДС явнополюсной синхронной машины….....112 4.6. Определение параметров синхронной машины со снятыми характеристиками….113 4.6.1. Определение индуктивного ненасыщенного сопротивления Xd……….…....113 4.6.2. Определение параметра Xd насыщенного……………………………………..114 4.6.3. Определение параметра Xq…………………………………………….………115 4.6.4. Определение параметров Xq и Xd методом скольжения……………….……115 4.6.5. Определение параметра Xs……………………………………………………..115 4.7. Понятие о сверхпереходных и переходных индуктивных сопротивлениях…..…116 4.8. Диаграммы намагничивающих сил………………………………………………….117 4.9. Параллельная работа синхронных генераторов…………………………….……...118 4.9.1. Параллельная работа генераторов при неравенстве напряжений……………118 4.9.2. Параллельная работа генераторов при неравенстве частот…………….……119 4.10. Синхроноскопы………………………………………………………………….…..119 4.10.1. Включение генератора параллельно сети на погасание ламп………….…..120 4.10.2. Включение генератора параллельно сети на бегущий свет………………..120 4.11. Электромагнитная мощность и момент синхронных машин………………..…..121 4.12. Режимы работы синхронной машины параллельно с сетью………………..…..122 4.13. Синхронные двигатели………………………………………………………….….125 4.13.1. Векторные диаграммы синхронного двигателя……………………………..126 4.13.2 Угловые характеристики синхронного двигателя……………………………126 4.13.3. Режим работы синхронного двигателя при постоянном моменте и переменном токе возбуждения…………………………………………………….…127 4.13.4. Пуск синхронного двигателя…………………………………………………129 Список литературы…………………………………………………………………………..132
I Трансформаторы Устройство трансформатора
Трансформатор – статистический электромагнитный аппарат преобразующий систему переменного тока одного напряжения в систему переменного тока другого напряжения. Трансформаторы служат для передачи и распределения электроэнергии потребителей. Трансформаторы бывают: повышающие, понижающие; однофазные, трех и многофазные; силовые, измерительные, испытательные и т. д. Номинальные данные щитка: SH, квт, U1H/U2H, I1H/I2H, l/l. Активными элементами трансформатора являются: 1. магнитопровод; 2. обмотки. Магнитопроводы бывают: 1. броневые; 2. стержневые. Для магнитопровода используется электротехническая сталь: 1. горячекатаная; 2. холоднокатаная.
Однофазные трансформаторы. Холостой ход однофазного трансформатора Ток холостого хода
Iм поток намагничивания
Отличие: поток от индукции запаздывает, Ф- поток Рассмотрим какие потоки и ЭДС в однофазном трансформаторе.
Ф0 ® E1, E2 ФS1 ® E2S ЭДС рассеяния e1S = -IS(dl0/dt) = -IS ЭДС рассеяния в комплексной форме (wlS = x)
В первой обмотке три ЭДС –
Фаза ЭДС E1 = -W1(dФ/dt) = -W
E1max = wW1Фm = 2pf1W1Фm E1 = E1 = 4, 44 f1W1Фm E2 = 4, 44 f1W2Фm
E1/E2 = k U1/U2 = k w –число витков При x x U2 = E2 U1 » E1
Совмещение режимов
Характеристики трансформатора при нагрузке определяют его рабочие свойства. Эти характеристики непосредственно можно получить только для трансформаторов небольшой мощности. Для трансформаторов средней и большой мощности характеристики при нагрузке определяют косвенным путем, т.е. путем наложения данных опыта короткого замыкания на режиме холостого хода.
1) Путем наложения треугольника короткого замыкания на режим холостого хода получим режим нагрузки т.е. напряжение U’2 и угол j2 между потоками I. 2) Потери при нагрузке равны потерям мощности при холостом ходе и коротком замыкании. ПНГ = ПХХ + ПКЗ = P0 + Pэл1, 2 3) Ток нагрузки трансформатора не равен току холостого хода и короткого замыкания. Для холостого хода Для короткого замыкания а при нагрузке 4) Коэффициент полезного действия можно получить через данные полученные в опыте холостого хода и короткого замыкания.
при холостом ходе P0 = PМГ При коротком замыкании PК= PЭЛ1, 2 = I2rк, Тогда
Задаваясь b = 0, 25; 0, 5; 0.75; 1.0; 1.25 при cosj2 = const построим зависимость h = f(b)
p0 = b2pКН, откуда
Относительные изменения напряжения - DU. Изменением напряжения трансформатора называется (выраженная в % от номинального вторичного напряжения) арифметическая разность между номинальным вторичным напряжением при холостом ходе UГН и напряжением U2 при номинальном токе.
1) при выводе используется предыдущая векторная диаграмма 2) расчет проведем аналитически 3) определим DU при номинальном токе 4) примем U1 равным 100 ед. т.е. U1 = 100, тогда
где mК = рс, nК = Ap/
возможны первые два члена, т.е.
Выразим DГ через составляющие напряжения короткого замыкания.
эта величина очень мала и ей можно пренебречь тогда Это выражение для b = 1, при различных значениях b
Видим, что, используя опыты холостого хода и короткого замыкания можно получить все характеристики трансформатора при нагрузке.
Трехфазные трансформаторы
Трехфазный трансформатор представляет собой соединение трех однофазных трансформаторов. Поэтому вся теория, рассмотренная для однофазного трансформатора относится и к трехфазному применительно к одной фазе. Но в трехфазных трансформаторах есть свои особенности, которые мы рассмотрим ниже. По конструкции трехфазные трансформаторы бывают в двух основных видах. 1. трансформаторы с независимой магнитной системой (групповые), где каждая фаза трансформируется своим трансформатором.
Групповой трансформатор
рис. 1
2.
рис.2
Недостатки группового трансформатора: 1) занимает большую площадь; 2) большая стоимость; 3) меньше КПД. Преимущества: 1) резерв достаточен на 1/3 установленной мощности; 2) транспортный габарит меньше чем у трехстержневого трансформатора. Групповой трансформатор используется на большие мощности на тепловых станциях. Трехстержневые трансформаторы используется в распределительных сетях на предприятиях.
Первая особенность. Эта особенность относится к трехстержневому трансформатору (рис.2). Поток в среднем стержне при холостом ходе проходит путь меньше, чем в крайних стержнях, а это приводит к тому, что токи в крайних стержнях на 40-50% больше, чем в среднем при симметричном потоке. Т.е. при холостом ходе токи представляют несимметричную систему. Модули не равны и угол не равен 120°.
Вторая особенность. Связана со способом соединения обмоток. Гостом предусмотрены следующие способы соединения обмоток: l, D, Z. Обозначение фаз.
При изготовлении трансформаторов, гостом предусматриваются следующие способы соединения: 1) l/l0 для мелких распределительных трансформаторов (на предприятиях); 2) l/D для трансформаторов средней и большой мощности; 3) l0/D для трансформаторов большой мощности при повышенном напряжении.
Соединение в зигзаг делается на стороне низкого напряжения.
Такой способ применяется там, где существует резкая не симметрия (точные трансформаторы, трансформаторы для выпрямительных устройств). При таком способе соединения выравнивается магнитная не симметрия по стержням.
Групповой трансформатор
В групповом трансформаторе поток третьей гармоники замыкается по тому же пути, что и основной поток, т.е. по малому магнитному сопротивлению. Поэтому величина потока Ф3 достигает 15¸ 20% от основного потока. Поток Ф3 наводит в фазах ЭДС е13, е23 с тройной частотой f3 = f13, поэтому фазная ЭДС е23 достигает 40¸ 60% от ЭДС первой гармоники Е23 = 4, 443× f1W2Ф3. ЭДС третьей гармоники накладывается на фазную ЭДС первой гармоники Е1. Искажая ее и увеличивая на 40-60%. Такое повышение фазной ЭДС не желательно, так как возможен пробой изоляции и перегорание потребителей рассчитанных на фазную ЭДС. Поэтому групповой трансформатор по схеме l/l не применяется.
В трехстержневом трансформаторе третья гармоника потока не может замыкаться по магнитопроводу, т.к. во всех фазах направлены в одну сторону (совпадают по фазе). Поэтому третья гармоника потока замыкается по маслу (воздуху), используя на своем пути стальные конструкции (бак, крепежные детали и т.д.). Так как магнитное сопротивление потокам третьей гармоники относительно велико, то эта гармоника потока в трехфазном трансформаторе относительно не велика и наводимая этим потоком ЭДС так же не велика, поэтому искажение фазной ЭДС практически нет. Однако потоки третьей гармоники замыкаясь по баку и крепежным конструкциям наводят в них с тройной частотой вихревые токи, т.е. увеличивает потери в стали так при индукции в стержне В = 1, 6 Тл, потери увеличиваются на 50% от основных.
Пример выполнения однослойной обмотки Дано:
2) Двухслойные обмотки
Особенностью двухслойной обмотки является то, что в пазу укладывается обмотка в два слоя. Недостатки: неудобство ремонта.
Преимущества: 1) меньше расход меди; 2) обмотку выполнить с укороченным шагом, можно избавиться от внешних гармоник ЭДС. Расположение фазных зон по пазам Z1 = 24
a = 30° q1 = 2
В двухслойной обмотке число катушечных групп в фазе равно числу полюсов (2P = 4). У катушечных групп чередование катушечных групп по фазам А, С, В, таких чередований будет равно числу полюсов (2P = 4) АСВ, АСВ, АСВ, АСВ. Каждая фаза состоит из четырех катушечных групп их соединение в фазу: Н – К – К – Н – Н – К – К – Н (Х)
В данной обмотке чередование катушечных групп с 2 катушками, т.е. 2 – 2 – 2 – 2 – при q – целом. Имеются обмотки с дробным q, например, в многоскоростных обмотках, когда в одних пазах укладываются две обмотки на разное число полюсов. Дробное Пример.
q2 ® число 5 означает, что в чередовании участвует пять катушечных групп – d; числитель с = 2, говорит о том, что катушечные группы имеют катушек на одну больше; b – остальные катушки группы имеют по две катушки, т.е. чередование катушечных групп будет следующее: 2 – 3 – 2 – 3 – 2 – q – дробное.
Роторные обмотки Роторные обмотки выполняются так же как и на статоре (3 фазы сдвинуты на 120°). В малых машинах делается обмотка петлевая катушечная. В машинах же средней и большой мощности обмотки в роторе делаются волновые или даже волновые стержневые. Волновые обмотки имеют преимущество при большом числе полюсов, т.к. при этом не нужно расходовать медь для межкатушечных соединений. Выводы волновой обмотки ротора должны быть симметричными, иначе будет биение ротора. Для выводов концов обмотки и переходов используются специальные таблицы в зависимости от Z2 и 2Р. У асинхронных двигателей с короткозамкнутой обмоткой – обмотка имеет вид беличьей клетки. Для машинной укладки обмоток используется обмотка – одно-двухслойная.
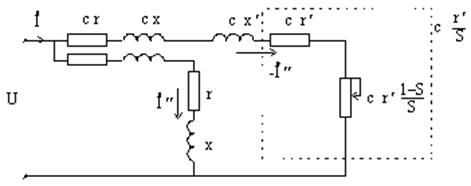
Режим двигателя
Рассмотрим два крайних режима двигателя: а) холостой ход двигателя При холостом ходе нет нагрузки на валу, ротор под действием вращающего магнитного поля статора разгонится до скорости близкой к синхронной, а ток статора равен току холостого хода. Мощность, потребляемая из сети пойдет на покрытие потерь, т.е. Ро = Рэл1 + Рмг + Рмех + Рдоб Разница между тр-м и двигателем будет только конструктивная. В двигателе имеется воздушный зазор. Поэтому ток холостого хода двигателя равен 20 - 30° от номинального. б) режим короткого замыкания При этом режиме ротор механически заторможен, а обмотка ротора закорочена. К статору подводится пониженное напряжение, при котором ток имеет значение близкое к номинальному. Мощность короткого замыкания пойдет на покрытие потерь в стали и обмотках. При номинальном напряжении пусковой ток Iп = (5 ¸ 7)Iн. Используя данные режима холостого хода и короткого замыкания можно построить круговую диаграмму, а по ней определить рабочие характеристики работы двигателя при нагрузке.
Г-образная схема замещения
В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать. В Г-образной схеме замещения
где Ток I1, не должен изменяться, тогда исходя из Т-образной схемы
а, в Г-образной схеме ток
после преобразования получим
поэтому параметры статорной обмотки должны умножить на коэффициент С1, а параметры роторной обмотки на Из Т-образной схемы ток
если подставить выражение тока
тогда отношение токов
равно комплексному коэффициенту С1.
т.е. С1 представляет собою отношение напряжения приложенного к двигателю
Реально в машинах r1 и rm < < rm и Xm. Если пренебречь сопротивлением r1 и rm, тогда коэффициент С1 примет вещественную величину
Г-образная схема замещения широко используется для построения круговой диаграммы асинхронной машины, а также вывода формулы электромагнитного момента.
Расчетная формула момента
Запишем известное выражение момента
для вывода расчетной формулы используем нижнюю часть векторной диаграммы асинхронного двигателя
тогда
тогда
Не все высшие гармонические магнитного поля, созданные статором и ротором сцепляются с обеими обмотками и образуют асинхронные вращающие моменты. Это особенно характерно для зубцовых высших гармоник. При определенных скоростях вращения ротора отдельные гармонические зубцового поля статора могут двигаться синхронно с соответствующими гармоническими зубцового поля статора. Под действием магнитных сил в этом случае возникают механические воздействия между статором и ротором и создаются синхронные моменты для какого-то одного значения скольжения. При этом пространственный период основной зубцовой гармоники статора и ротора должен быть одинаков. То есть
Вибрационные силы и моменты Зубцовые и другие магнитные поля статора ротора, образующие синхронные моменты, проявляющиеся не только при взаимном синхронном их вращении, но и при любых других скоростях вращения. В этом случае они образуют периодически меняющиеся вращающиеся моменты, которые в течение одного полупериода направлены в сторону вращения ротора, а в течении другого полупериода в обратном направлении. Такие периодически меняющиеся моменты могут создавать вибрации ротора и статора, которые становятся особенно заметными при наличии резонансных явлений. При неблагоприятных соотношениях зубцов статора и ротора могут возникнуть не только тангенциальные, но так же и радиальные магнитные силы притяжения, действующие на статор и ротор и перемещающиеся вдоль окружности воздушного зазора при вращении ротора, эти силы вызывают вибрацию машины. Косвенный метод (по данным опыта холостого хода и короткого замыкания). Используя данные опыта холостого хода и короткого замыкания можно построить упрощенную круговую диаграмму, а из нее получить данные для построения рабочих характеристик. Обозначим в рабочей ветви Тогда ток - Геометрическим местом тока
Построение круга диаграммы.
Из опыта холостого хода для UН находим Р0 и I0, I0 = и определяем а по ним строится вектор тока хх – I0, задавшись масштабом тока mI (A/см) Для построения точки А, где S = 1 приводим ток Iк, мощность Рк и Cosjк к номинальному напряжению Iп ® Uн. Из рис. 2
Откладываем отрезок
Построение линии OF. Определение точки В.
откуда отрезок Получим точку В. Соединив точку О с В и продлив до окружности получим точку F где S = ±¥. Мощность
Задавшись mI, определим масштаб мощности
Тогда мощность
Как получить данные из круговой диаграммы для построения рабочих характеристик? P1, I1, h, Cosj1, S, n = f(P2) Задавшись током I1 I1 = (0, 25; 0, 5; 0, 75; 1, 0; 1, 25) Iн Табл. 1
Для каждого значения тока I1 определяем (1-6) и сводим в таблицу 1. По данным таблицы строятся рабочие характеристики 1. 2. 3. 4. S = 5. 6.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 399; Нарушение авторского права страницы

 = -Im wlS coswt
= -Im wlS coswt реактивное
реактивное ,
, 


 = wW1Фm sin(wt - p/2), (wW1Фm = E1m)
= wW1Фm sin(wt - p/2), (wW1Фm = E1m) Действующие значения ЭДС обмотки
Действующие значения ЭДС обмотки





 ; PКH – при номинальном токе IH,
; PКH – при номинальном токе IH, 
 Максимумы h наступает тогда, когда потери в стали равны потерям в меди.
Максимумы h наступает тогда, когда потери в стали равны потерям в меди.



 , т.е. для определения DU достаточно определить вторичное напряжение
, т.е. для определения DU достаточно определить вторичное напряжение 
 из D OA р.
из D OA р.  - mК
- mК
 , тогда
, тогда  - mК, а DU
- mК, а DU

 , тогда
, тогда

 , из формулы видно, что DU зависит как от величины, так и от характера нагрузки. Кроме того, видим, что для определения DU используется данные, полученные из опыта короткого замыкания.
, из формулы видно, что DU зависит как от величины, так и от характера нагрузки. Кроме того, видим, что для определения DU используется данные, полученные из опыта короткого замыкания. Используя это выражение, можно получить ряд характеристик при нагрузке:
Используя это выражение, можно получить ряд характеристик при нагрузке: 
 Трансформаторы трехстержневые, где существует магнитная связь между фазами
Трансформаторы трехстержневые, где существует магнитная связь между фазами При нагрузке система токов по фазам принимает симметричную систему.
При нагрузке система токов по фазам принимает симметричную систему. Соединение делается так, чтобы ЭДС этих полуобмоток вычиталось, для этого необходимо конец одной части фазы соединить с концом второй части другого стержня.
Соединение делается так, чтобы ЭДС этих полуобмоток вычиталось, для этого необходимо конец одной части фазы соединить с концом второй части другого стержня.
 1.7.2. Трехстержневой трансформатор
1.7.2. Трехстержневой трансформатор 



 (1 ¸ 7)
(1 ¸ 7)
 (1 ¸ 6)
(1 ¸ 6)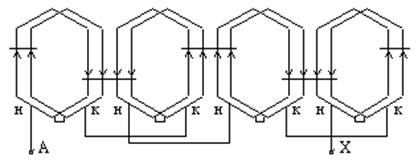




 ,
,  - комплексное число
- комплексное число

 ,
,  (см. Г-образную схему). Покажем связь между током в роторе
(см. Г-образную схему). Покажем связь между током в роторе  (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током  (Г-образной схемы замещения).
(Г-образной схемы замещения). ,
,  и преобразуем это выражение, тогда получим
и преобразуем это выражение, тогда получим ,
, 

 к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
 ,
, 
 Расчетная формула момента показывает, что момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
Расчетная формула момента показывает, что момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
 ,
,  ,
,  ,
, 
 , т.е. момент зависит от потока и активной составляющей тока ротора.
, т.е. момент зависит от потока и активной составляющей тока ротора.
 т.е. при
т.е. при 
 ,
,  ,
,  ,
, 

 является окружность.
является окружность. ,
,  ,
, 
 ,
, 
 , откуда
, откуда 
 ,
,  ,
, 
 ,
,  получаем точку А. Соединив точку А с О получим хорду окружности. Опуская перпендикуляр из середины хорды до линии
получаем точку А. Соединив точку А с О получим хорду окружности. Опуская перпендикуляр из середины хорды до линии  получим центр окружности
получим центр окружности  .
. ,
,  , r1 - известно
, r1 - известно .
. , т.е.
, т.е. ,
, 

 ,
,  ,
, 





 ,
, 