|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Собственные значения и собственные вектора.
Скаляр Û и вектор v называются собственным значением и собственным вектором матрицы A, если выполняется соотношение: Av= Û v. Пусть L – диагональная матрица, у которой на диагонали стоят собственные значения матрицы A, а V – матрица, столбцами которой являются собственные вектора матрицы A. Тогда справедливо соотношение: AV = VL. Если V несингулярная матрица, то матрицу A можно представить в виде разложения: A = VLV-1. Возьмем матрицу A из предыдущего примера:
A = 0 -6 -1 6 2 -16 -5 20 -10 Тогда функция eig(A) возвращает вектор собственных значений матрицы A:
lambda = eig(A) lambda = -3.0710 -2.4645 +17.6008i -2.4645 -17.6008i
Так как действительная часть собственных значений является отрицательной, то eÛ t стремится к нулю с ростом t. Ненулевая мнимая часть двух собственных значений, Gè, является осциллирующей, sin(è t ), компонентой решения дифференциального уравнения. Для вычисления собственных значений и собственных векторов матрицы A используется формат команды eig с двумя выходными параметрами:
[V, D] = eig(A) V = -0.8326 0.2003 - 0.1394i 0.2003 + 0.1394i -0.3553 -0.2110 - 0.6447i -0.2110 + 0.6447i -0.4248 -0.6930 -0.6930 D = -3.0710 0 0 0 -2.4645 +17.6008i 0 I
Собственные векторы хранятся в столбцах матрицы V, а собственные значения – в диагональных элементах матрицы D. Собственные векторы масштабированы так, чтобы евклидова норма каждого вектора равнялась единице.
Нормальная форма Жордана. Жорданова нормальная форма возникла из попыток получить с помощью преобразования подобия диагональную матрицу. В жордановой нормальной форме собственные значения располагаются на диагонали, но некоторые наддиагональные элементы равны единице, а не нулю. Функция jordan строит нормальную жорданову форму и имеет два формата:
· J=jordan(A) возвращает жорданову нормальную форму J; · [V, J] = jordan(A) вычисляет как жорданову форму J, так и матрицу трансформации V, столбцами которой являются обобщенные собственные векторы. Более точно, V\A*V=J. Рассмотрим пример:
A = [12, 32, 66, 116; -25, -76, -164, -294;... 21, 66, 143, 256; -6, -19, -41, -73] A = 12 32 66 116 -25 -76 -164 -294 21 66 143 256 -6 -19 -41 -73 [V, J] = jordan(A) V = 4 -2 4 3 -6 8 -11 -8 4 -7 10 7 -1 2 -3 -2 J = 1 1 0 0 0 1 0 0 0 0 2 1 0 0 0 2 Очевидно, что матрица A имеет собственные значения 1 и 2, каждое из которых имеет кратность два. Матрица имеет только два собственных вектора: V(:, 1) и V(:, 3), которые удовлетворяют соотношениям:
A*V(:, 1) = 1*V(:, 1) A*V(:, 3) = 2*V(:, 3) Два других столбца матрицы V являются обобщенными собственными векторами, удовлетворяющими соотношениям:
A*V(:, 2) = 1*V(:, 2) + V(:, 1) A*V(:, 4) = 2*V(:, 4) + V(:, 3) Или в математической нотации:
( A-Û 2I)v4=v3 ( A-Û 1I)v2=v1
Разложение Шура. С помощью функции schur можно представить матрицу A в виде произведения: A=USU’, где U – унитарная матрица, а S – матрица Шура. Действительная форма Шура имеет действительные собственные значения на диагонали, а комплексные собственные значения представлены 2x2 блоками, занимающими нижнюю поддиагональ. Для матрицы A из предыдущего примера имеем:
[U, S] = schur(A) U = 0.4815 -0.8033 -0.3476 0.0440 -0.7223 -0.1404 -0.6539 0.1759 0.4815 0.5421 -0.5300 0.4398 -0.1204 -0.2028 0.4131 0.8796 S = 1.0000 -2.2351 -33.6613 470.5067 0.0000 1.0000 -5.9193 118.5827 0 0 2.0000 -16.7473 0 0 0 2.0000 Сингулярное разложение. Скаляр â и векторы u, v называются сингулярным значением и сингулярными векторами прямоугольной матрицы A, если выполняются соотношения:
Av = â u и A’u = â v.
Эти соотношения можно переписать в виде:
AV = UÌ и A’U = VÌ,
Где Ì – диагональная матрица, элементами которой являются сингулярные значения â, U и V – ортогональные матрицы, столбцы которых образуют соответствующие сингулярные векторы u и v. В силу ортогональности матриц U и V справедливо разложение:
A = UÌ V’
Сингулярное разложение проводится с помощью функции svd. Рассмотрим пример:
A =[9 4; 6 8; 2 7] A = 9 4 6 8 2 7 [U, S, V] = svd(A) U = -0.6105 0.7174 0.3355 -0.6646 -0.2336 -0.7098 -0.4308 -0.6563 0.6194 S = 14.9359 0 0 5.1883 0 0 V = -0.6925 0.7214 -0.7214 -0.6925 Численное интегрирование. Численное интегрирование заключается в приближенном вычислении определенного интеграла с помощью одной из квадратурных формул. Рассмотрим применение функции quad, которая выполняет интегрирование по методу низкого порядка, используя рекурсивное правило Симпсона. Найдем значение определенного интеграла для функции f(x)=x3 на отрезке [0, 1]:
quad('x.^3', 0, 1, 1.e-8) ans = 0.2500 Перечислим входные параметры. Первый аргумент описывает подынтегральную функцию и может быть строковой константой, указателем функции или операторной функцией. Второй и третий параметры задают пределы численного интегрирования. Последний параметр задает относительную погрешность метода. Для вычисления двойного интеграла можно использовать функцию dblquad:
q = dblquad(fun, xmin, xmax, ymin, ymax, tol)
здесь fun – подынтегральная функция, tol – относительная погрешность, а остальные параметры задают пределы интегрирования. Пример:
Q = dblquad(inline('y*sin(x)+x*cos(y)'), pi, 2*pi, 0, pi) Q = -9.8696 Представление полиномов в среде MATLAB. В системе MATLAB полином представляется с помощью вектора-строки, содержащего упорядоченные по убыванию коэффициенты полинома. Например, чтобы представить многочлен p(x)=x3-2x-5, следует создать вектор:
p = [1 0 -2 -5];
Умножение и деление многочленов. Для реализации умножения и деления многочленов следует использовать функции conv и deconv. Рассмотрим многочлены a(s)=s2+2s+3 и b(s)=4s2+5s+6. Вычислим их произведение:
a = [1 2 3]; b = [4 5 6]; c = conv(a, b) c = 4 13 28 27 18
Разделим многочлен c на a:
[q, r] = deconv(c, a) q = 4 5 6 r = 0 0 0 0 0
Вектор r представляет собой остаток.
Вычисление производной от многочлена. Для определения производной от многочлена используется функция polyder. Вычислим производную от многочлена p:
p = [1 0 -2 -5]; q = polyder(p) q = 3 0 -2 Функция polyder позволяет находить производную от произведения двух многочленов и от их частного. Для примера, построим два многочлена a и b.
a = [1 3 5]; b = [2 4 6];
Вычислим производную от произведения a*b, используя вызов функции с одним выходным параметром:
c = polyder(a, b) c = 8 30 56 38 Для вычисления производной от частного a/b, следует использовать вызов функции с двумя выходными параметрами:
[q, d] = polyder(a, b) q = -2 -8 -2 d = 4 16 40 48 36 где q/d является результатом операции.
Вычисление значения многочлена. Для вычисления значения многочлена следует использовать функцию polyvalm:
p = [1 0 -2 -5]; polyval(p, 5) ans =
Функция polyvalm позволяет также вычислять матричный многочлен. Вычислим значение многочлена p(X)=X3-2X-5I от квадратной матрицы X :
X = [2 4 5; -1 0 3; 7 1 5]; Y = polyvalm(p, X) Y = 377 179 439 111 81 136 490 253 639
Нахождение корней многочлена. Корни многочлена можно найти с помощью функции roots:
r = roots(p) r = 2.0946 -1.0473 + 1.1359i -1.0473 - 1.1359i Здесь p – вектор из предыдущего примера, r – вектор, компонентами которого являются корни многочлена.
Построение многочлена по его корням. Функция poly возвращает коэффициенты многочлена, если корни его известны: p2 = poly(r)
p2 = 1.0000 0 -2.0000 -5.0000 Построение характеристического многочлена. Если в качестве аргумента использовать матрицу, то функция poly возвращает коэффициенты характеристического многочлена:
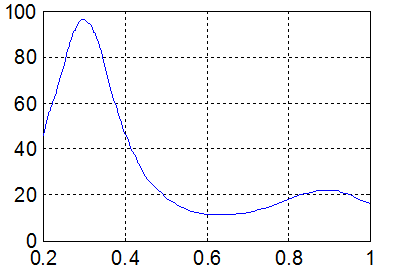
A=[1 2 3; 4 5 6; 7 8 0] A= 1 2 3 4 5 6 7 8 0 p = poly(A) p = 1.0 -6.0000 -72.0000 -27.0000 Минимизация функций. Для нахождения минимума функции одной переменной на заданном интервале следует использовать функцию fminbnd. Найдем на интервале [0.2, 1] минимум функции
f = inline('1./((x-0.3).^2 + 0.01) + 1./((x-0.9).^2 + 0.04)-6'); x = fminbnd(f, 0.2, 1)
x = 0.6370 fplot(f, [0.2 1]); grid on;
Функция fplot используется для вывода графика операторной функции f на заданном интервале [0.2, 1]. Для минимизации функций нескольких переменных можно использовать функцию fminsearch. Поиск минимума основан на симплекс-методе Нелдера – Мида, который сводится к построению симплекса в n-мерном пространстве, заданного n+1 вершиной. В двумерном пространстве симплекс является треугольником, а в трехмерном – пирамидой. На каждом итерационном шаге значение функции в новой точке (приближенном решении) сравнивается со значениями функции в вершинах симплекса. В результате новая точка заменяет ближайшую вершину симплекса. Итерации повторяются до тех пор, пока размеры симплекса не станут меньше заданной погрешности метода. В качестве примера рассмотрим поиск минимума тестовой функции Розенброка:
Минимальное значение этой функции равно нулю и достигается в точке [1, 1].
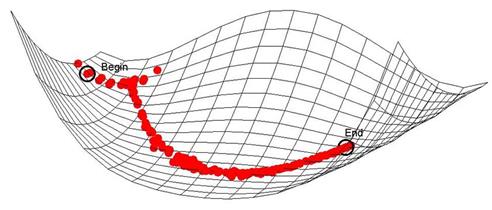
f = inline('100*(x(2)-x(1)^2)^2+(1-x(1))^2; '); [x, fval] = fminsearch(f, [-1.2, 1]) x = 1.0000 1.0000 fval = E-010 Первый входной параметр функции fminsearch описывает функцию одной или нескольких переменных, а второй параметр задает нулевое приближение и может быть скаляром, вектором или матрицей. Приведем текст программы, которая строит сетчатую поверхность функции Розенброка и отмечает точками на графике каждый итерационный шаг:
x=-2:.25: 2; y=-1:.25: 3; [xx, yy]=meshgrid(x, y); zz=100*(yy-xx.^2).^2+(1-xx).^2; mesh(x, y, zz, 'FaceColor', 'non', 'EdgeColor', 'k'); axis off; view(13, 32); hold on; plot3(-1. 9, 2, 267. 62, 'ko', 'MarkerSize', 15, 'LineWidth', 2, 'EraseMode', 'none'); text(-1.9, 2.2, 267.62, ' Begin', 'Color', [0 0 0], 'EraseMode', 'none'); plot3(1, 1, 0, 'ko', 'MarkerSize', 15, 'LineWidth', 2, 'EraseMode', 'none'); text(0.8, 1.4, 0, ' End', 'Color', [0 0 0], 'EraseMode', 'none'); x=[-1.9 2]; % Начальное приближение f='[100*(x(2)-x(1)^2)^2+(1-x(1))^2; minfn(x)]'; [x, fval, exitflag, output] = fminsearch(f, x); function out=minfn(currPos) x1=currPos(1); y1=currPos(2); z1=100*(y1-x1.^2).^2+(1-x1).^2; plot3(x1, y1, z1, 'r.', 'EraseMode', 'none', 'MarkerSize', 25); out = [];
Метки Begin и End обозначают начальное и конечное приближение. Функции fminbnd и fminsearch входят в состав пакета Optimization Toolbox, который служит для решения оптимизационных задач и систем нелинейных уравнений.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 420; Нарушение авторского права страницы