|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Режимы работы, энергетические соотношения и векторные диаграммы асинхронной машины
Двигательный режим (0< s< 1). Схема замещений асинхронной машины отражает все основные процессы, происхбдящие в ней, и представляет собой удобную осно, ву для изучения режимов работы машины. Рассмотрим, имея в виду схему: замещения рис. 24-6, процесс преобразования активной энергии и мощности при двигательном режиме работы асинхронной машины. В этом режиме передача энергии в схеме рис. 24-6 совершается слева направо. Асинхронный двигатель потребляет из сети активную мощность
Соотношение (24-74) совпадает с (24-24). Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рнх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются), магнитных потерь в сердечнике ротора ржП и добавочных потерь рд. Последние вызваны в основном
высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник н. с. обмоток и зубчатого строения статора и' ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационны-ми потерями. Магнитные потери в сердечнике ротора при нормальных рабочах режимах обычно очень малы и отдельно не учитываются1; Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0, 5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений гх и г2 и поэтому в величину рд не включают. Полезная механическая мощность на валу, или вторичная мощность, В соответствии с изложенным на рис. 24-9, а изображена энер* гетическая диаграмма асинхронного двигателя. Сумма потерь двигателя К. п. д. двигателей мощностью Рн = 1 -т- 1000 кет при номинальной нагрузке находится соответственно в пределах т]н =
= 0, 72 н- 0, 95. Более высокие к. п. д. имеют двигатели большей мощности и с большей скоростью вращения. В качестве иллюстрации приведем данные о потерях и к. п. д. трехфазного асинхронного двигателя с Ря = 14 кет, ия н = = 220/380 в, /1й = 27, 2а (фазный), ^ = 50 гц, 2р = 4, sH = 0^28, ян = 1460 об/мин, cos фн = 0, 877. Для этого двигателя в номинальном режиме работы Р2 = р^ = 14 000 в/п, рЭл1 = 770 вт, ркГ = = 318 вт, рЭл2 — 411 вт, рих = 205 вт, рЙ = 79 вт, сумма потерь
Рис. 24-9. Энергетические диаграммы асинхронной машины при работе в режиме двигателя (а), генератора (б) и противовключения (в) ръ = 770 + 318 + 411 + 205 + 79 = 1783 вт. Первичная мощность Рх = 14 000 + 1783 = 15 783 вт. К- п. д., согласно равенству (24-77), Рассмотрим еще некоторые вопросы, относящиеся к асинхронным двигателям. Из выражений (24-71), (24-72) и (24-73) вытекают следующие важные соотношения: Из этих соотношений видно, что электромагнитная мощность РЭм подразделяется на составляющие рэл2 и Рмх пропорционально s и (1 — s) и при заданной величине Рви потери р8л2 пропорциональны скольжению s. Поэтому для уменьшения рЭя2 и получения хорошего к. п. д. необходимо, чтобы s было мало. В нормальных асинхронных двигателях при номинальной нагрузке sH = 0, 02 -*■ 0, 05.
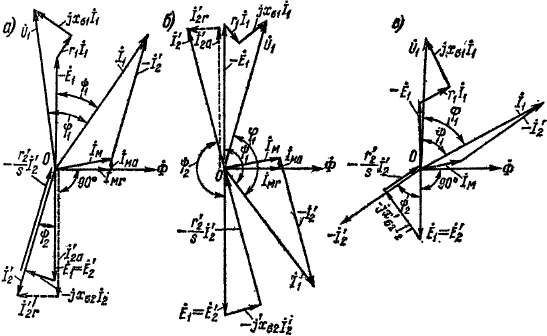
Очевидно, что требование малости sH сопряжено с требованием, малости г2: ).. Отметим, что электрическая мощность развиваемая во вторичной цепи асинхронного двигателя, называется; также мощностью скольжения. На основе схемы замещения рис. 24-6 можно рассмотреть также баланс реактивных мощностей асинхронного двигателя. Из первичной цепи потребляется реактивная мощность Диаграмма реактивных мощностей двигателя изображена на рис, 24-10, Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничявающ'его тока /« значительно больше, чем в трансформаторах. Большие величины QM и /н существенно влияют на коэффициент мощности двигателя и снижают его.величину. Обычно у асинхронных двигателей cos ф„ = 0, 70 -*- 0, 95. Большие значе-* ния относятся к мощным двигателям с 2р — 2 и 4. При уменьшении' нагрузки cos ф двигателя значительно уменьшается, до значения cgs < ро«0, 10 -т- 0, 15 при холостом ходе. Векторная диаграмма асинхронного двигателя строится на основе схемы замещения рис. 24-6 и имеет вид, изображенный на рис. 24-11, а. Она аналогична векторной диаграмме трансформатора и отличается от нее относительно большей величиной намагничивающего тока /м и тем, что электрическая нагрузка вторичной цепи, соответствующая механической мощности РяЖ, является чисто активной. Ввиду малости скольжения сопротивление r'Js1 значительно больше х^, и угол ita поэтому мал.
Генераторный режим (— оо < s < 0). Для осуществления генераторного режима работы асинхронной машины ее нужно включить в сеть переменного тока и вращать с помощью соответствующего приводного двигателя (машина постоянного тока, тепловой или гидравлический двигатель) в сторону вращения магнитного поля со скоростью п, превышающей синхронную скорость пх. Скольжение машины при этом, согласно выражению (19-6), отрицательно.
Рис. 24-11. Векторные диаграммы асинхронной машины при работе в режимах двигателя (в), генератора (б) и противовключения (в) Теоретически скорость п в генераторном режиме может изменяться в пределах пх < п < оо, чему [см. выражение 119-6)] соответствует изменение скольжения в пределах 0 > s > — оо. В действительности высокие скорости вращения недопустимы по условиям механической прочности, а по условиям ограничения потерь и нагревания и сохранения высокого к. п. д. в генераторном режиме возможны абсолютные значения скольжения такого же порядка, как и в двигательном режиме. Рассмотрим на основании соотношения (24-17) активные и реактивные относительно э. д. с. £ 2 составляющие токи 1%. Для этого положим в выражении (24-17) й" 2 = Ег и умножим числитель и знаменатель на сопряженный комплекс знаменателя. Тогда получим
В двигательном режиме s > 0 и обе составляющие 1га, /2/. тока /2 положительны. Множитель — / перед /2г означает поворот вектора /2Г относительно /2О на комплексной плоскости в сторону вращения часовой стрелки на 90°. Это означает, что /2Г отстает от /2а на 90°, т. е. /2г является индуктивным током. В генераторном режиме s < 0 и, согласно выражению (24-85), -по-прежнему /2г> 0, а величина 1Ы меняет знак, т. е. становится отрицательной и меняет свою фазу на 180°. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратную сторону, вследствие чего изменяются знаки э. д. с. £ 2S и активной составляющей тока /2. В результате изменяется также знак вращающего момента, т. е. последний действует против направления вращения и становится' тормозящим. На основании изложенного на рис. 24-11, б построена векторная диаграмма асинхронного генератора. Вектор первичного тока, вследствие поворота /^ почти на 180° также поворачивается в сторону вращения часовой стрелки. При этом ц> х > 90° и т. е. активные составляющие первичного тока и первичной мощности изменяют знак. Это означает, что машина уже не потребляет,, как в режиме двигателя, а отдает в сеть активную мощность и ак-< тивный ток, т. е. работает в режиме генератора и преобразует потребляемую с вала механическую энергию в электрическую. Направление вектора падения напряжения — -у- /, на диаграмме рис. 24-11, б совпадает с направлением 1'%, так как значение s от- рицательно и поэтому величина------ положительна. Из векторных диаграмм рис. 24-11, а и б следует также, что реактивные составляющие первичного тока и первичной мощности Ql== ftljUiIi Sin ф! при переходе машины из двигательного режима в генераторный сохраняют свои знаки. Это означает, что асинхронный генератор также потребляет из сети реактивную мощность и индуктивный ток. Поэтому асинхронный генератор может работать только на сеть» к которой приключены такие электрические машины и устройства (например, синхронные генераторы или компенсаторы, конденсаторы), которые могут являться источниками реактивной мощности,
потребляемой асинхронным ренератором для создания в нем магнитного поля или магнитного потока (см. также § 29-2). Потребление асинхронными генераторами реактивной мощности является весьма существенным недостатком, вследствие чего эти генераторы применяются только в очень редких случаях. Равенства (24-67)—(24-74), (24-78) и (24-79) справедливы также для генераторного режима, если иметь в виду, что в этом режиме s < 0. Изменение знаков мощностей означает изменение направления передачи или превращения энергии. В генераторном режиме работы сопротивления — и —— г'^ a S в схемах замещения рис. 24-6 изменяют знак, т. е. становятся отрицательными, что связано также с изменением знаков соответствующих мощностей. Хотя электрические проводники могут иметь только сопротивления г > 0, тем не менее, введение понятия об отрицательных активных сопротивлениях полезно. Если положительные сопротивления г являются потребителями электрической энергии Рг, то отрицательные г необходимо рассматривать как источники, или генераторы, электрической энергии Рг. В частности, генератор постоянного тока в целом можно рассматривать как отрицательное сопротивление Для ненасыщенного генератора последовательного возбуждения U ~ I, и для него поэтому г = const. Для других генераторов г =f= const. Отрицательные при s < 0 активные сопротивления в схемах рис. 24-6 тоже следует рассматривать как источники электрической энергии, соответствующей потребляемой с вала механической энергии. Поток активной энергии на схемах рис. 24-6 в этом случае идет справа налево. В соответствии с изложенным на рис. 24-9, б изображена энергетическая диаграмма асинхронного генератора. Преобразование реактивной мощности в асинхронном генераторе происходит так же, как и в двигателе (рис. 24-10). Режим противовключения (1 < s < оо). В этом режиме ротор приключенный к сети асинхронной машины вращается за счет подводимой извне к ротору механической энергии против вращения поля, вследствие чего скорость вращения ротора п< 0и, согласно выражению (19-6), s> 1. На практике в этом режиме обычно 1 < s< 2. Поскольку как в двигательном, так и в режиме противовключения s > 0, то в соответствии'С выражением (24-85) активные и реактивные составляющие вторичного тока имеют в" режиме противовключения такие же знаки, как и в двигательном. Это означает, что и в режиме противовключения машина потребляет из сети активную мощность и развивает положительный вращающий момент,
действующий в сторону вращения поля. Но, поскольку ротор вращается в обратном направлении, на него этот момент действует тормозящим образом. В режиме лротивовключения машина потребляет также механическую мощность с вала или с ротора, поскольку внешний вращающий момент действует в сторону вращения ротора. Как мощ-н<! > сть, потребляемая из сети, так и мощность, потребляемая с вала, расходуются на потери в машине. Полезной мощности машина поэтому не развивает, а в отношении нагрева рассматриваемый режим является тяжелым. Соотношения (24-67)—(24-76) и (24-78), - (24-79) действительны также и для режима противовключения. При s> 1, согласно выражению (24-71), Р»д> 0, а согласно выражению (24-78), рЭл2 > > ^ft, M. Поэтому получаемая за счет энергии сети и передаваемая на ротор электромагнитная мощность покрывает только часть-потерь во вторичной обмотке. В соответствии с соотношением (24-74) механическая мощность Рт < 0, т. е. эта мощность потребляется с вала. Она покрывает остальную часть потерь во вторичной обмоткв| так как км. равенство (24-73)j РвЯ% == *вМ ~~ " |Н1 и в данном случае Рвм > 0 и — Рях > 0. По сравнению с двигательным и генераторным режимами pa«i боты в режиме противовключения сопротивление г%/$ мало. Поэтому; на основании равенства (24-1в) можно заключить, что ток /а и угол; " Ф? == Z (£ $»! %) велики. Соответственно этому первичный ток Jt и угол сдвига фаз < рх = L (U%> h) тоже велики. Это также указываем на опасность режима в тепловом отношении. Поэтому при Ux — Uln рассматриваемый режим допускается лишь кратковременно., На основании изложенного и в соответствии со схемами рис. 24-6; на ряе. 24-9, в, изображена энергетическая диаграмма, а на; рис. 24-11, ^ —векторная диаграмма асинхронной машины в pej жиме противовключения. Преобразование реактивной мощносг^ э режиме противовключения происходит так же, как и в двигательном (рис. 24-1(3). режим противовключения на практике исдользуетфя для тормо«, зрвия и остановки асинхронных двигателей и Приводимых нм«, & движение производстееннда механизмов. Например, в ряде слу-ч|ев, при необходимости быетро|г остановки двигателя, путей переключения двух питающих нроводт $рехфззвого щт$шт изменяют чередование фаз и ная^вденне вращения щмя, a potop Вч течение некоторого времени вращй? тея прр этой щ п& щщт в прежаем направлении, т. е. теперь.? уще против нбця. МезШяиче^ екая меадяоеть Рмх [см. равенство ^#74)J в данном щучт щзт-^etca за счет кинетической энергии вращающихся ще£ ШМШшт уменьшения скорости вращения. При п да 0 машину необходимо отключить от сети, так как иначе она придет во вращение в обратном направлении. Таким же образом может осуществляться быстрый реверс (изменение направления вращения) двигателя, причем в этом случае, естественно, при п да О отключать двигатель от сети не нужно. В начале процесса реверсирования также существует режим противовключения. Режим противовключения называют также режимом электромагнитного тормоза. Следует, однако, иметь в виду, что существуют и другие способы электромагнитного торможения асинхронной машины. Режим короткого замыкания. Режимом короткого замыкания асинхронной машины называется ее режим при s = 1, т. е. при неподвижном роторе. Этот режим соответствует начальному моменту пуска асинхронного двигателя из неподвижного состояния. Сопротивление асинхронной машины относительно ее первичных зажимов при s — 1 называется сопротивлением короткого замыкания ZK. Согласно схемам замещения рис. 24-6, (24-86)
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 1745; Нарушение авторского права страницы